本文已比较纯粹的方式介绍编码器和驱动的编写

编码器最少有两个输出信号,一种典型的结构如上图所示。AB是编码器的输出引脚。当触点和黄色的金属片接触的时候信号发生跳变沿,可以上上升沿也可以是下降沿,具体根据AB引脚默认的电平状态,和金属片电平状态。

当编码器转过一段角度后就会出现上图的波形。AB信号交替出现脉冲。上图所示的状态。B还在金属片上B是高电平,A已经不再金属片上恢复默认电平低。逆时针转动时,A触点比B触点先接触到金属片。所以A的高电平超前B的高电平。超前多少,根据金属片的长度和AB触点的间距决定。所以当顺时针转动的时候,B触点比A触点先接触到金属片。
根据这样的特点可以,从AB出现脉冲的先后可以判别出旋转的方向。脉冲的个数可以判断出转了多少角度。
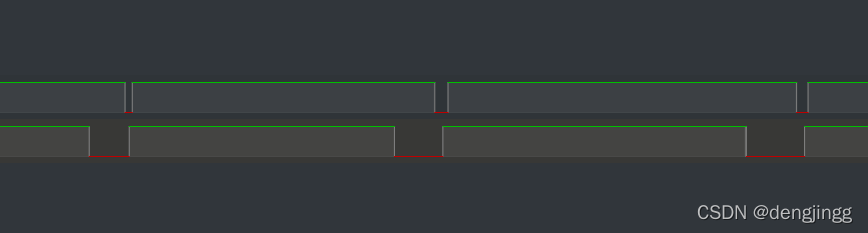
实际波形
上通道为A,下通道为B
下图为正逆时针旋转
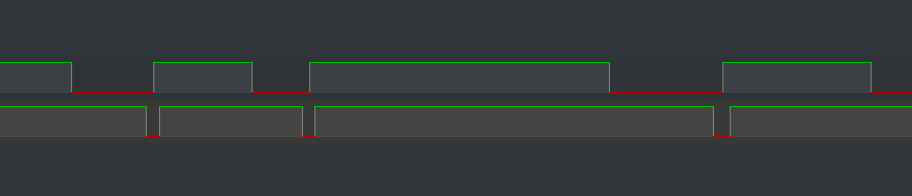
下图为顺时针旋转
对于数字输入输出的MCU来说,可以使用三种方式来实现编码器的驱动
1.GPIO抽样法
按照一定的时间间隔去采集AB触点的电平,根据电平的状态去判别脉冲计数。
上图所示,I:A出现低电平时,B是高电平。出现第一张图顺时针的状态。
II: B是低电平的时候,A是高电平,说明出现第二张图的状态。
抽样法关键在于测量到上述I,II的特征电平。抽样的时间需要根据旋转编码器的最快速度来进行设定,已保证能够采样到特征电平。
一般来说手工扭动的旋转编码器的采样间隔可以是1ms
代码如下,输入参数gpio1,gpio2为AB项的电平值。需要1ms为周期进行采样
encoder_poision_cnt 为脉冲计数器
encoder_dir 为方向
实验结果还不错,虽然看上去简单,但是其稳定性不错。
void task2_task(void *pvParameters)
{
while(1)
{
encoder_gpio_in = GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_10);
encoder_gpio_in2 = GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_11);
encoder_dir = app_encoder_gpio_mes_test(encoder_gpio_in,encoder_gpio_in2);
vTaskDelay(1);
}
}
uint16_t app_encoder_gpio_mes_test(uint16_t gpio1,uint16_t gpio2)
{
static char lock=0;
static uint16_t knob_dir =0;
if((gpio1 == 0 && gpio2 ==1)&(!lock))
{
lock =1;
knob_dir= 1;
encoder_poision_cnt++;
}
else if((gpio2 ==0 && gpio1==1)&(!lock))
{
lock =1;
knob_dir = 2;
if(encoder_poision_cnt>0)
encoder_poision_cnt--;
}
else if((gpio2 ==1 && gpio1==1))
{
lock =0;
knob_dir= 0;
}
return knob_dir;
}
2.中断法
由于编码器是金属触点,所以必然会出现抖动。抖动对于响应快速的外部中断来说是一个比较麻烦的问题。
根据抖动的持续时间,可以做一个简单的延时滤波。
原理是AB接触到触点时,会发生电平的跳边沿,跳边沿触发中断后,判断电平的状态。从而按照1的方法判别
void app_encoder_it_init()
{
NVIC_InitTypeDef NVIC_InitStruct;
EXTI_InitTypeDef EXTI_InitStruct;
EXTI_InitStruct.EXTI_Line =EXTI_Line10;
EXTI_InitStruct.EXTI_LineCmd =ENABLE ;
EXTI_InitStruct.EXTI_Mode =EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStruct);
EXTI_InitStruct.EXTI_Line =EXTI_Line11;
EXTI_Init(&EXTI_InitStruct);
GPIO_EXTILineConfig(GPIOA,GPIO_PinSource10);
GPIO_EXTILineConfig(GPIOA,GPIO_PinSource11);
NVIC_InitStruct.NVIC_IRQChannel =EXTI15_10_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd =ENABLE ;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 14;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_Init( &NVIC_InitStruct);
}
static void do_things(void)
{
int i =2000;
while (i>0)
{
i--;
}
}
void EXTI15_10_IRQHandler(void)
{
static char lock=0;
static uint16_t knob_dir =0;
do_things();
if(EXTI_GetITStatus(EXTI_Line10))
{
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_10))
{
}
else
{
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_11))
{
encoder_poision_cnt++;
knob_dir = FORWORD;
}
}
EXTI_ClearITPendingBit(EXTI_Line10);
}
else if (EXTI_GetITStatus(EXTI_Line11))
{
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_11))
{
}
else
{
if((GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_10))& (encoder_poision_cnt>0))
{
encoder_poision_cnt--;
knob_dir = BACKWORD;
}
}
EXTI_ClearITPendingBit(EXTI_Line11);
}
3.使用TIM 的编码器模块
STM32 的TIM模块自己带encoder的接口,可以不在CPU的参与下自己动进行方向,脉冲计数。
需要用户去读取CNT和DIR的数值已获取计数值和旋转方向。
TIM模块庞大复杂,如果不熟悉该模块可以使用上面的基础方法。
代码如下
void app_encoder_tim_gpio_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin =GPIO_Pin_8;
GPIO_InitStruct.GPIO_Speed =GPIO_Speed_10MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin =GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed =GPIO_Speed_10MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
app_encoder_tim();
}
void app_encoder_tim(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0;
TIM_TimeBaseStructure.TIM_Period = 60000;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 4;
TIM_ICInit(TIM1, &TIM_ICInitStructure);
TIM1->CNT = 0;
TIM_EncoderInterfaceConfig(TIM1, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);
TIM_Cmd(TIM1,ENABLE);
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)