具体的环境及其细节:Ubuntu18.04 realsenseD435i ROS orbslam2_echo_gou的博客-CSDN博客
下载代码:https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map
运行代码:
解压代码后,删掉作者自己编译的build文件夹(下面三个都删除):
~/ORB_SLAM2_modified/build,
~/ORB_SLAM2_modified/Thirdparty/DBoW2/build
~/ORB_SLAM2_modified/Thirdparty/g2o/build
然后在/opt/ros/melodic/setup.bash中的最后加入对应的路径,即:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:xxx/xxx/catkin_ws/src/ORB_SLAM2/Examples/ROS
然后 chmod +x build.sh 和 chmod +x build_ros.sh 赋予执行权限
然后编译: ./build.sh
然后: build_ros.sh
如果报错:

在对应(xxx/Examples/ROS/ORB_SLAM2)CMakeLists中加入以下:
//set(PCL_DIR "/home/gzy/my_local_lib/pcl-pcl-1.8.1")
find_package(PCL 1.8 REQUIRED COMPONENTS)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
set(LIBS ${PCL_LIBRARIES})
从之前的slam代码中拷贝一份Vocabulary文件夹 和 data数据集 和 kinect2.yaml文件 粘贴到现在的对应目录中。
把data测试数据文件夹考过去,同时还有各种yaml文件
运行出错:

参考
在ORB-SLAM2_RGBD_DENSE_MAP-master/Examples/ROS/ORB_SLAM21/CMakeLists.txt里做如下修改
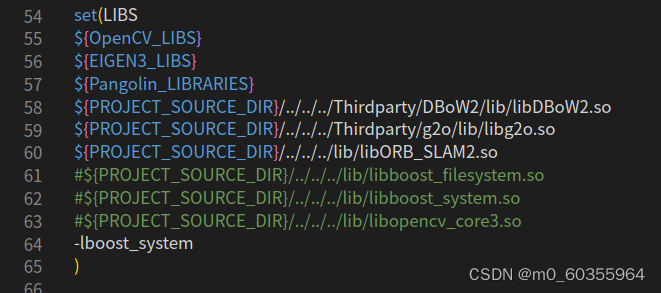
然后将原来主文件下的lib文件夹删除,再运行
需要将pointcloudmapping.h 文件中bool loopbusy;改为bool loopbusy=false;不然可能显示不了点云。
运行:
记着将ros_rgbd.cc文件中的topic对应进行修改
roslaunch realsense2_camera rs_rgbd.launch
rosrun ORB_SLAM21 RGBD Vocabulary/ORBvoc.bin Examples/RGB-D/RealSense.yaml /camera/rgb/image_raw:=/camera/color/image_raw /camera/depth_registered/image_raw:=/camera/aligned_depth_to_color/image_raw
参考:
ORB SLAM 2 + 构建点云地图 复现 - 简书
使用ORBSLAM2进行kineticV2稠密建图,实时转octomap建图以及导航 - 百度文库
使用ORBSLAM2进行kineticV2稠密建图,实时转octomap建图以及导航 - 古月居
ORB_SLAM2+kinect稠密建图实战项目总结_orbslam2稠密建图_好好仔仔的博客-CSDN博客
使用D435i相机跑ORB-SLAM2_RGBD_DENSE_MAP-master稠密建图编译(实时彩色点云地图加回环+保存点云地图)_m0_60355964的博客-CSDN博客
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)