传感器: 小觅相机标准版
开源SLAM方案: ORB_SLAM2,VINS MONO,VINS FUSION,RTAB-Map
测试地点: 室内大厅(光线不均)/ 露天阳台
实现形式: 小觅相机 / kinect 在目标地点跑两圈
相机标定:
1) 安装标定工具,在命令行里输入:
rosdep install camera_calibration
rosmake camera_calibration
2) roscore
3) source MYNT-EYE-S-SDK/wrappers/ros/devel/setup.bash
roslaunch mynt_eye_ros_wrapper mynteye.launch
4) rosrun camera_calibration cameracalibrator.py --size 9x6 --square 0.02516 --no-service-
check --approximate=0.1 right:=/right/image_raw_color left:=/left/image_raw_color right_camera:=/mynteye/right left_camera:=/mynteye/left
获取图像校准参数
1)cd MYNT-EYE-S-SDK
2)./samples/_output/bin/tutorials/get_img_params
获得针孔模型下的 distortion_parameters 和 projection_parameters 参数,然后在×××.yaml 更新。
方案匹配:
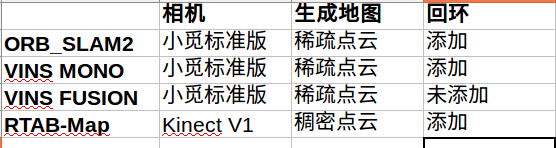
一、slam方案:ORB_SLAM2
室内跑两圈,采集结果如下:
 说明:
说明:
1、可获得point、keyframe、graph数据
2、相比于kinect相机,跑小觅相机中速运动时不易丢包;
3、重定位算法比较好,但仍有较大偏差;
4、光线强度高的地方很容易丢包;测量地点为一个闭环,测试结果却没形成闭环;图像为稀疏点云,数据大了会卡。
二、slam方案:VINS MONO;mono+imu;回环
室内跑两圈,采集结果如下:
 说明:
说明:
1、加回环检测(红三角)能识别曾经到过的路径并修正,但延迟比较高;未加回环(绿三角)跑偏,相比于vins fusion的双目不加回环,效果较差;
2、IMU漂移比较严重
三、slam方案:VINS FUSION;stereo+imu;无回环
室内跑两圈,采集结果如下:
 说明:
说明:
1、快速运动时不丢包;光线不敏感,能适应复杂场景; 能形成闭环
2、生成稀疏点云图,同ORB_SLAM2,需后期进行稠密建图等优化处理
3、未加回环,无法识别曾经到过的路径,拟后期加上回环再进行测试
四、slam方案:RTAB
三楼阳台测试,生成点云图示意:
 说明:
说明:
1、SLAM集成完整;可生成稠密地图,用于导航、避障
2、慢速下不易丢包【速度和ORB差不多】;丢包后能进行快速重定位;对光线不敏感,能适应多复杂场景
3、两种安装格式:二进制——直接应用;源码——可二次开发
4、用kinect测试,效果不错,但kinect可视距离在2米内;拟后期改跑小觅相机再测试
综上:
可参考方案有VINS FUSION和RTAB:
1)若选择VINS FUSION双目+imu,加入回环算法,效果会好很多;但后续仍需优化、稠密建图等处理
2)若选择RTAB-Map,添加小觅相机的依赖,提高识别距离,效果应该不错;选用源码安装方式,便于后期二次开发。
以上是相机实跑SLAM方案测试结果,小白一枚,若有误差,请指出,不甚感激!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)