- 在git上下载dso, 并编译
opencv_version = 4.2.0
cd ~/lib_dso/dso
mkdir build && cd build
cmake ..
make -j4
-
在git上下载dso_ros2,修改cmakelists.txt中lib目录,dso_ros.cpp,cmakelists文件。创建自己相机的camera.txt,并在dso_ros.cpp中修改为自己calibration文件的地址。修改~/slam算法/dso_ros2/src/dso_ros2/dso/CMakeLists.txt中line 37:set(DSO PATH ...)。全部修改好后再编译dso_ros2。
-
source工作空间后,先启动相机,再通过命令ros2 run dso dso_ros image:=/camera/color/image_raw model:=1运行即可。在树莓派上,通过包的方式运行成功。
-
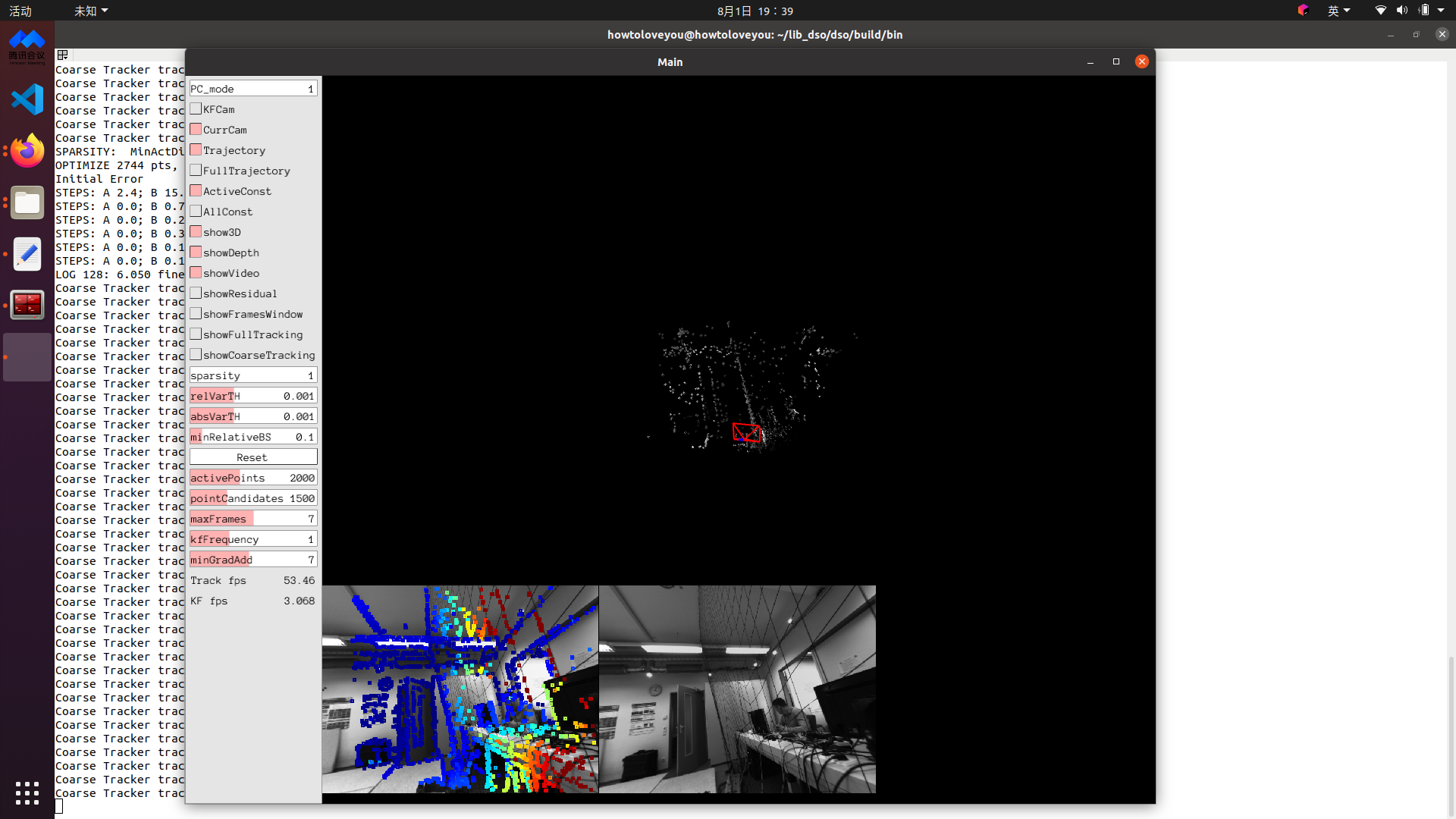
lib_dso方法运行:先下载tum的单目数据集,再cd到dso的build目录下使用如下命令运行dso:
cd ~/lib_dso/dso/build/bin
./dso_dataset \
files=~/slam-dataset/sequence_01/images.zip \
calib=~/slam-dataset/sequence_01/camera.txt \
gamma=~/slam-dataset/sequence_01/pcalib.txt \
vignette=~/slam-dataset/sequence_01/vignette.png \
preset=0 \
mode=0
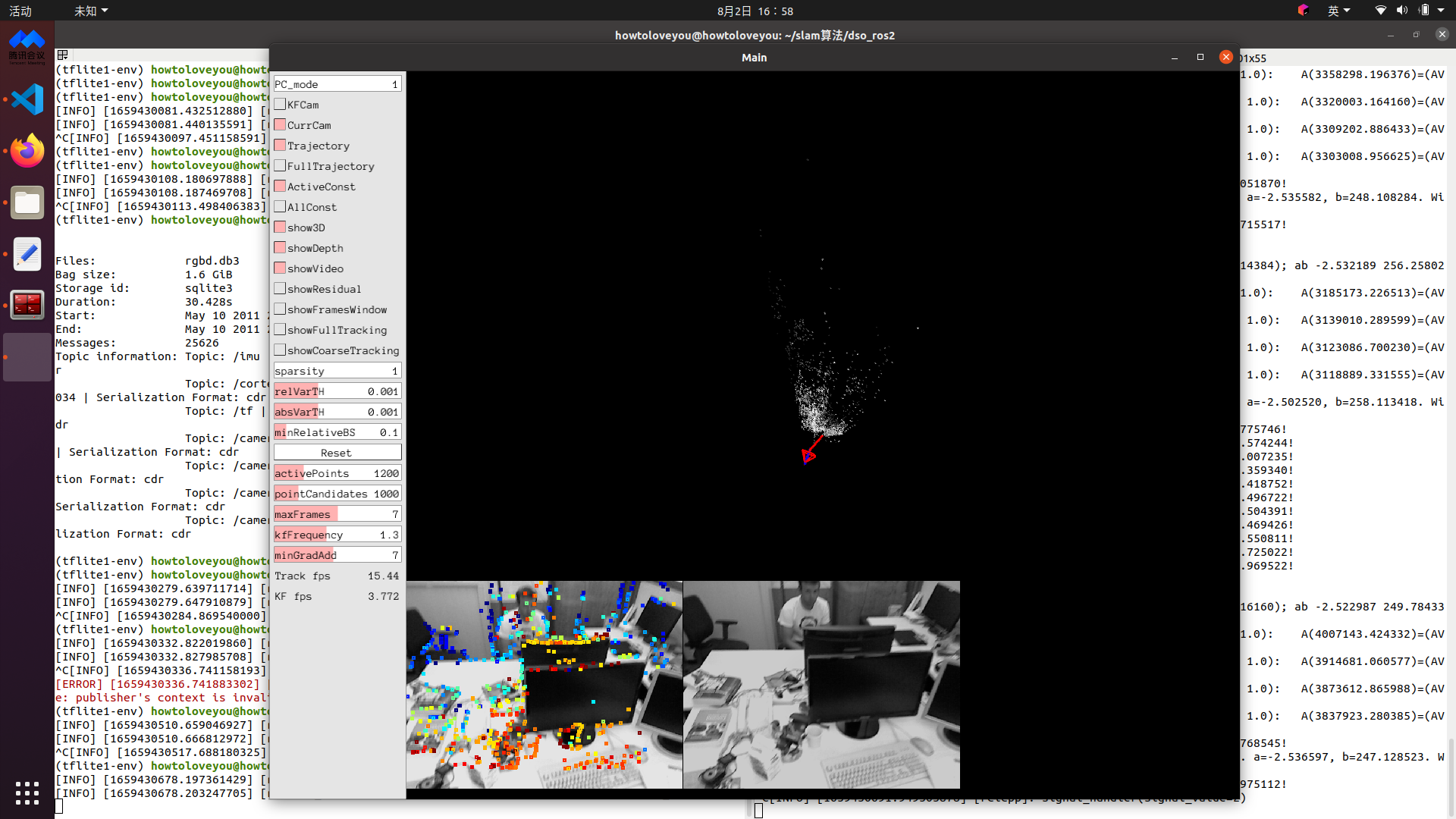
- dso_ros2方式启动dso
cd ~/slam算法/dso_ros2
. install/setup.bash
ros2 run dso dso_ros image:=camera/rgb/image_color model:=1
cd ~/slam-dataset
ros2 bag play rgbd
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)