一。PWM基础知识
1.PWM的定义
PWM,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通过调节占空比的变化来调节信号、能量等的变化。
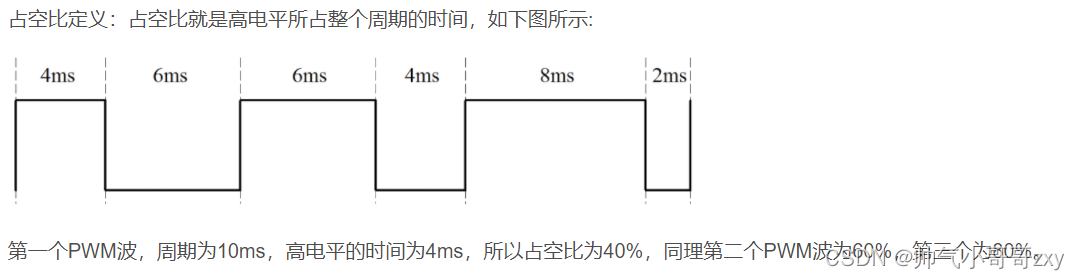
2.占空比
占空比就是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比,例如方波的占空比就是50%.
单位: % (0%-100%)
表示方式:20%
3.PWM的用途和优点:
电机调速、功率调制、PID调节、通信等等,配置简单、抗干扰能力强,从处理器到被控系统信号都是数字形式的,无需进行数模转换。并且让信号保持为数字形式可将噪声影响降到最小,噪声只有在强到足以将逻辑1改变为逻辑0或将逻辑0改变为逻辑1时,也才能对数字信号产生影响,这是PWM用于通信的主要原因。
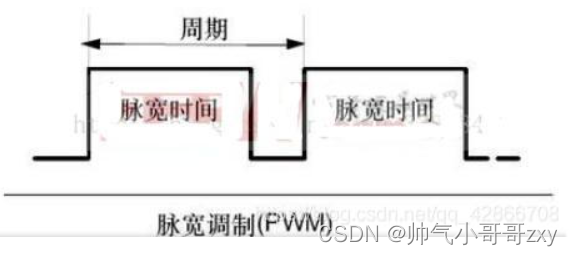
4.PWM的周期图
5.PWM的频率:
是指1秒钟内信号从高电平到低电平再回到高电平的次数(一个周期);也就是说一秒钟PWM有多少个周期
单位: Hz
表示方式: 50Hz 100Hz
6.PWM的周期:T=1/f 周期=1/频率
50Hz = 20ms 一个周期
如果频率为50Hz ,也就是说一个周期是20ms 那么一秒钟就有 50次PWM周期
二。PWM工作过程
1.
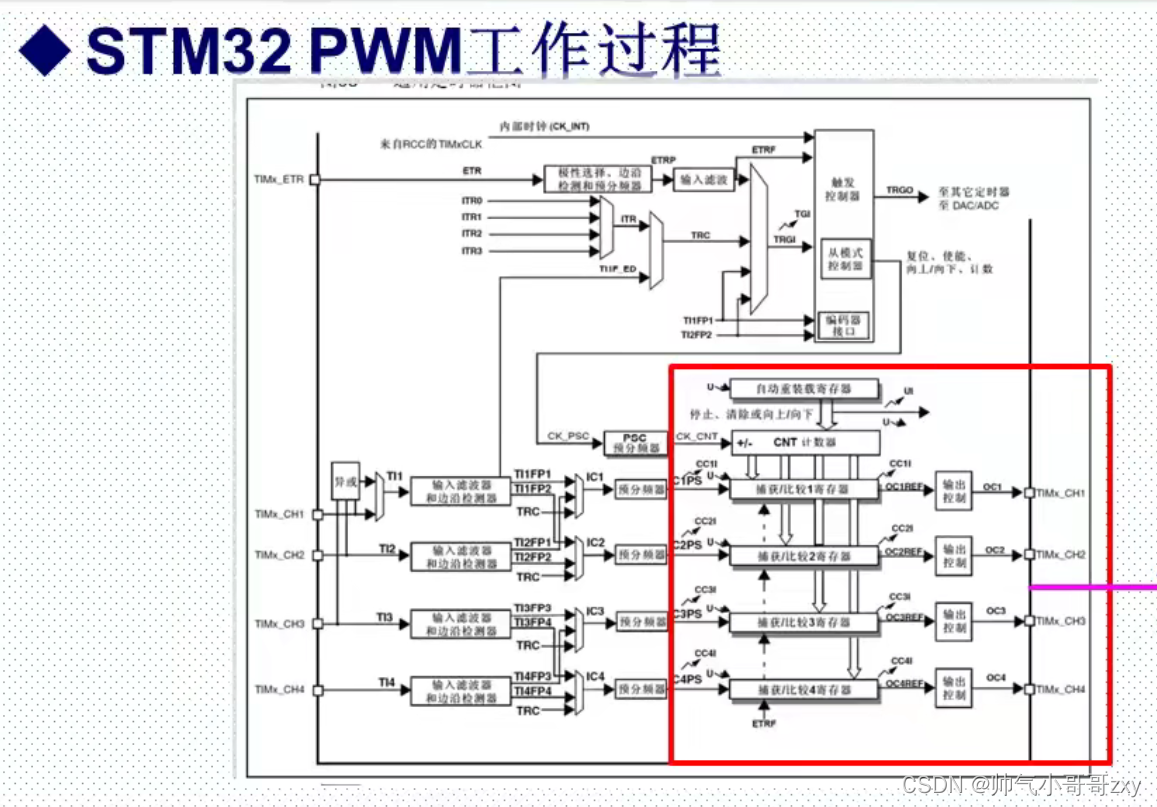
这个部分是定时器的输出部分。
在定时器的时机部分,它的时钟是默认的内部时钟,产生时钟信号,提供给我们的定时器,定时记步器给他作为时钟,这里有PWM输出单元
2.
注意:1.ARR是自动加载值

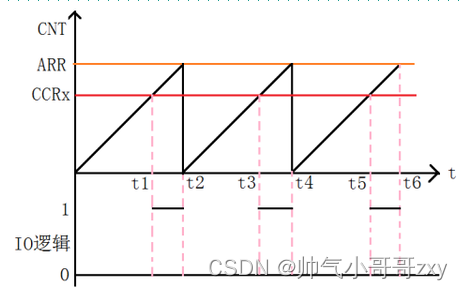
三。STM32 PWM工作过程(通道1为例)
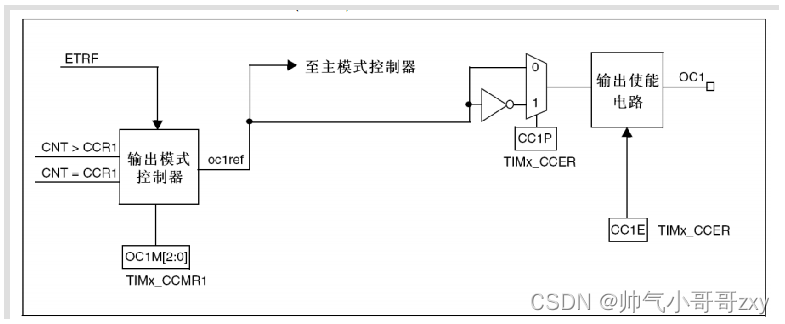
CCR1:捕获比较(值)寄存器(x=1,2,3,4):设置比较值。
CCMR1: OC1M[2:0]位:
对于PWM方式下,用于设置PWM模式1【110】或者PWM模式2【111】
CCER:CC1P位:输入/捕获1输出极性。0:高电平有效,1:低电平有效。
CCER:CC1E位:输入/捕获1输出使能。0:关闭,1:打开。
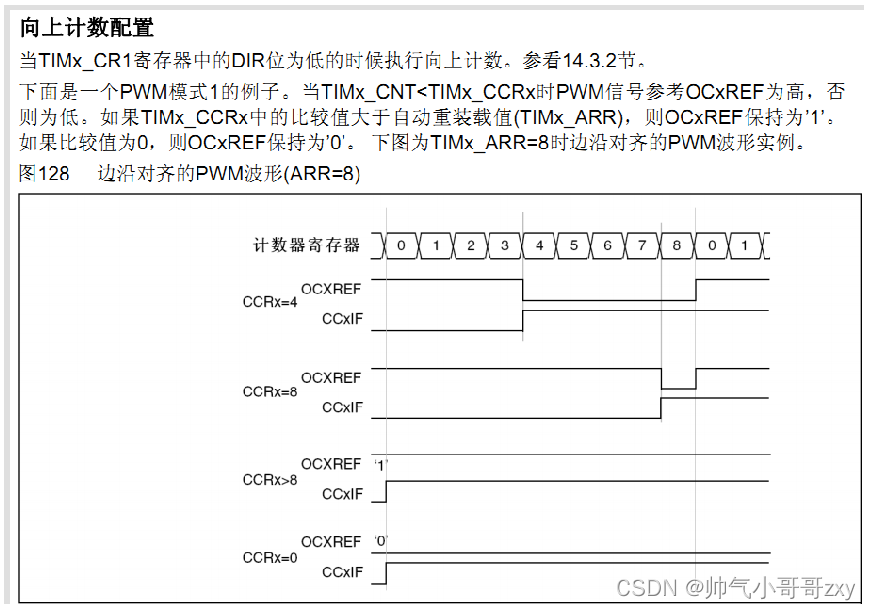
四。PWM模式1 & PWM模式2
寄存器TIMx_CCMR1的OC1M[2:0]位来分析:

五。STM32 PWM工作过程
六。STM32 PWM

void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
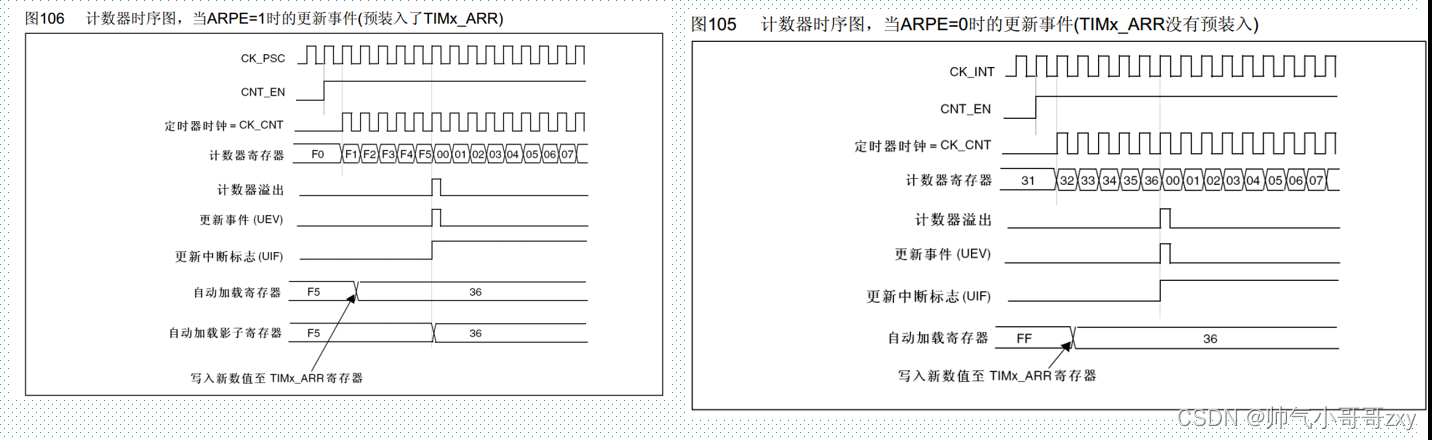
七。自动重载的预装载寄存器
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
简单的说,ARPE=1,ARR立即生效。。。APRE=0,ARR下个比较周期生效。
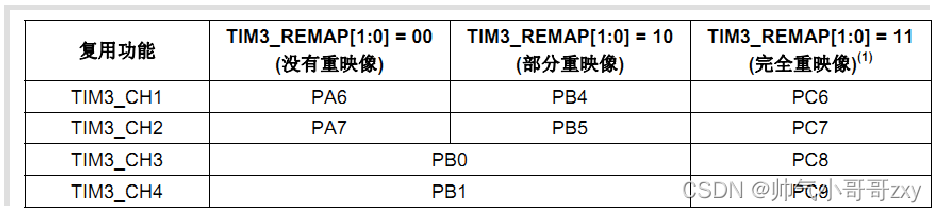
八。STM32 定时器3输出通道引脚(注意:Datasheet中表格会有详细说明)
九。代码
(1)PWM输出库函数
void TIM_OCxInit(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
typedef struct
{
uint16_t TIM_OCMode; //PWM模式1或者模式2
uint16_t TIM_OutputState; //输出使能 OR失能
uint16_t TIM_OutputNState;
uint16_t TIM_Pulse; //比较值,写CCRx
uint16_t TIM_OCPolarity; //比较输出极性
uint16_t TIM_OCNPolarity;
uint16_t TIM_OCIdleState;
uint16_t TIM_OCNIdleState;
} TIM_OCInitTypeDef;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure. TIM_Pulse=100;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
(2)设置比较值函数:
void TIM_SetCompareX(TIM_TypeDef* TIMx, uint16_t Compare2);
(3)使能输出比较预装载:
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
(4)使能自动重装载的预装载寄存器允许位:
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
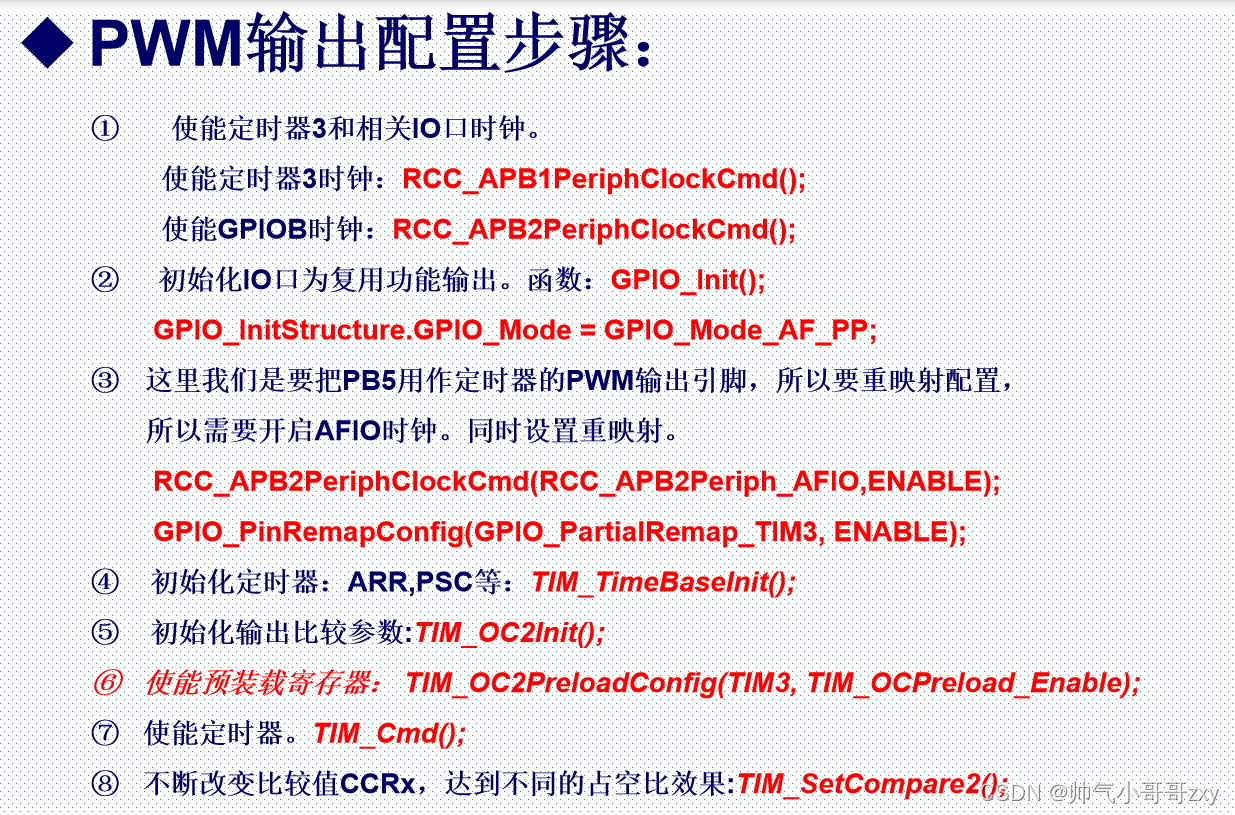
十。PWM输出配置步骤:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)