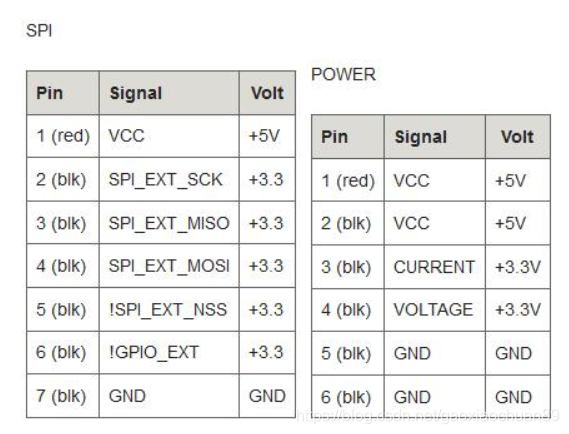
pixhawk接口图和引脚如下。
pixhawk可以同时使用2个GPS,这只能使用其中一个罗盘,实际中飞控挑选其中信号好的一个GPS进行定位。
硬件部分:第二个GPS插在serial 4/5接口上,线序与GPS口一致(参考GPS接口和serial 4/5接口)。
软件部分:固件为apm3.2以上,然后到地面站”所有参数“中修改GPS_AUTO_STITCH参数值为1 以及修改GPS_TYPE2参数值为1。



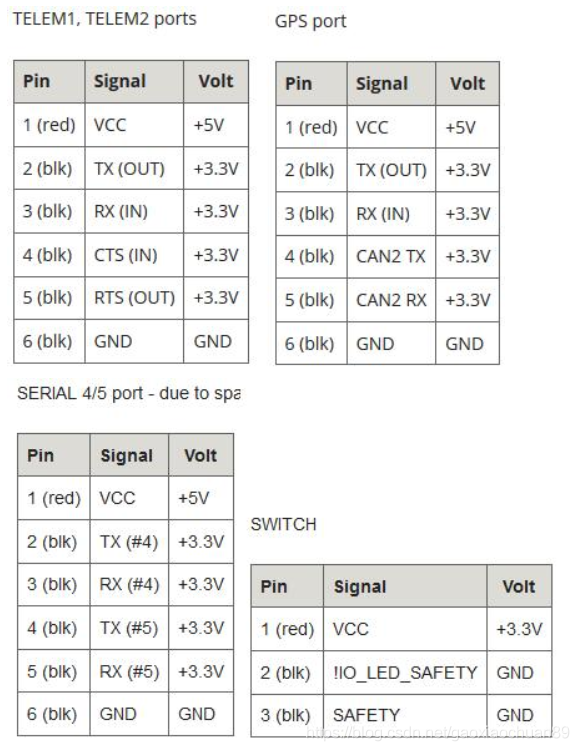
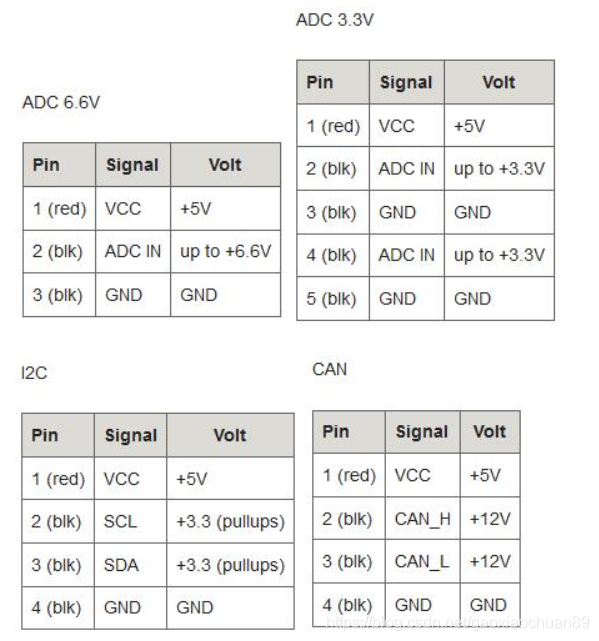
gps接vcc,tx,rc,gnd即可,然后gps的外置罗盘接scl,sda即可。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)