时钟模块上的GPS接收机负责接收GPS天线传输的射频信号,然后进行变频解调等信号处理,向基站提供1pps信号,进行同步。 GPS使用原子钟(原子钟,是一种计时装置,精度可以达到每2000万年才误差1秒)
1PPS:秒脉冲
英文全称:Pulse Per Second
GPS组合频率标准:校频机组成GPS 铷原子频标由GPS 接收板、铷振荡器、锁相电路、分频电路等部分组成。可以输出频率信号,1PPS 信号以及时间码信息。还有外部频率输入和外部秒信号输入选项。应用领域军用靶场及电子对抗时统设备、高精度导航
GPS时钟主要分为两类,一类是GPS授时仪,主要输出时标信息,包括1PPS及TOD信息;另外一类是GPS同步时钟,后者输出利用卫星信号驯服OCXO或者铷钟得到的高稳定频率信息,以及本地恢复的更平稳的时标信号。
1PPS信号特性
模块输出的高精度1PPS信号,精度优于50ns,占空比为50%,1PPS信号 上升沿为时间同步点,上升沿时间小于
5ns。第一帧串口报文信息与1PPS信号同步精度约为36ms。如图所示:
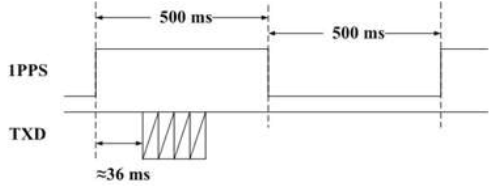
1PPS信号提供精确的时钟同步信号,脉冲宽度为200-300ms,采用上升沿为准时点,上升时间△T不超过10ns。TOD时间数据信息包含了当前1PPS上升沿所 对应的时刻信息,并可用于传送北斗双模系统相关的状 态、配置信息;TOD在1PPS上升沿之后1ms开始传送,并在500ms内传完。
具体实例:
对于Ublox F9P模块,UART 输出 NEMA 数据,另外一个GPIO输出 1PPS 脉冲,有如下时序图:
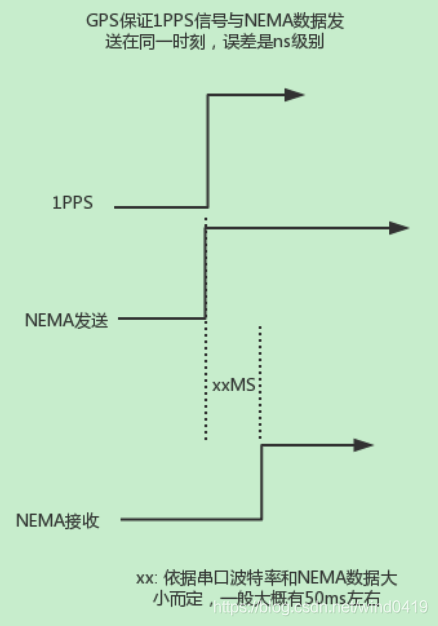
1. NEMA中包含有时间信息,一般是秒级别,也有部分带有毫秒
2. 1PPS即每秒输出一个脉冲,图中以高电平触发为例(没画下降沿),接收及处理1PPS脉冲的时间也在ns级别
3. 因为NEMA是通过串口发送和接收,而且一次NEMA数据量也有KB级别大小,处理时间远比1PPS时间长
4. 通过NEMA中的秒级时间和1PPS脉冲相配合,即可实现高精度时间同步(ns级:依据1PPS的响应时间)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)