一、概述
在之前的文章里,我们从一个基本的IMU模块开始讲起(二),利用Allan方差分析方法(三、四),得出了其误差参数,
又通过标定(五、六、七、八)、温补(九)提高了原始数据精度,通过导航解算(十)得出了状态预测值,通过分析惯性导航误差传播规律(十一)写出了状态方程,
最后使用滤波器(十二)把状态、观测融合在一起。
然而,这其实并不完整,首先初始对准还没有做,其次融合是为了得到更精确的位置、速度、姿态,但是导航误差和IMU自身的内参是耦合在一起的,
要估得更精确,强行忽视可不行,但是那么多内参都应该放在状态量里吗,真的是估的越多越好吗?这就牵扯到状态量的可观测性分析。
本篇文章就着重解决初始对准和可观测性分析两个问题。由于理解初值对准要先理解可观测性分析,因此先讲后者。
二、可观测性分析方法
虽然组合导航的内容很多,但是如果要让我挑一个最核心的技术点,我认为就是可观测性分析,因为它和所有的估计问题绑定在一起,
是导航这个毛线团的毛线头,抓住这个毛线头,绝大多数融合问题就都可以迎刃而解。广义上讲,分析可观测性,就是分析各状态量之间的耦合关系,
虽然我们之前没有提过这个概念,但是却在标定、温补等环节分析过各变量的耦合及解耦方法。狭义上讲,由于观测性这个名词是从现代控制理论里面来的,
随后被应用到kalman滤波(控制理论里的可观测性分析方法就是kalman本人提出的),所以一般导航问题里说可观测性分析,仅指滤波过程中的耦合分析,
具体包括系统级标定、初始对准、组合导航。
1. 理解可观测性
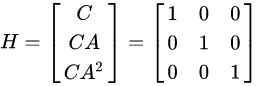
之前介绍耦合问题的时候,以简单的方程为例子,这里不妨使用可观测性分析的方法从新审视一下这些例子。现在假设有状态量 
,它的各量之间满足如下关系

简单的方程可以这样直接观察得到结果,但当方程变得复杂,观察不出来的时候,就需要想别的办法。可观测性问题是现代控制理论里的重要问题,
在 kalman 本人发明 kalman 滤波器之前就已经解决了这个问题。如果一个系统可以用如下方程表示
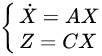
其中A是状态矩阵,C是观测矩阵,那么当下面的矩阵满秩的时候,整个系统就是完全可观测的,也即所有参数都是可解的。
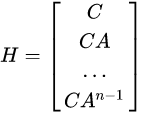
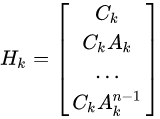
其中n是A矩阵的维数;这个矩阵也被称作可观测性矩阵。回到上面的例子,在第一个例子里,有
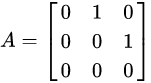

那么它的观测性矩阵可以写为
显然是满秩的,所以它完全可观测。在第二个例子里,有
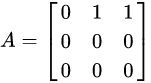

它对应的观测性矩阵为
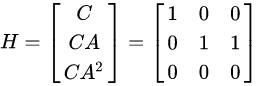
不满秩,所以不完全可观测。
2. 改变可观测性
上面的分析让我们知道什么样的系统是完全可观测的,什么样的是不完全可观测的。但这只是发现问题,我们还要解决问题,
即把所有系统都按照完全可观测标准去设计。在组合导航的问题里,是想可观就可观的吗?有时候是有时候不是,等这一节看完你会明白这句话的意思。
通过上面简单的方程例子,可以发现,对它做一些改造,是可以满足可观测性的。
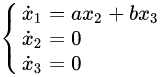
在这里,虽然大家会发现无论a和b取任何值,这个模型都是不完全可观的,但是kalman是一个迭代估计过程,如果a和b在估计过程中是时变的,
即不是常值,那么它就可以完全可观测。得出这个结论的方法叫 分时段可观测性分析方法(PWCS)。用数学形式可以表达为,既然a和b是变化的,
那么A就是变化的,进而引起`$\wp$`的变化,可以得出k时刻的观测性矩阵为
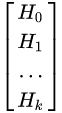
PWCS指的是把所有时刻的观测性矩阵放在一起(如下式),如果它是满秩的,那么整个系统也同样是完全可观测的。
这个和我们以前讲的耦合其实是一回事,比如在标定的例子里,当方程组不可解的时候,就转动IMU,等同于构建新的方程组,
当方程组个数足够解出所有变量的时候,这个就叫 完全可观测
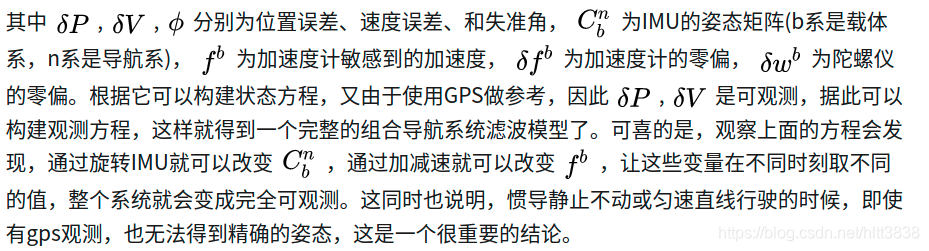
回到组合导航的问题,如果有这样可改变的'a'和'b',那么就容易把系统由不可观变成可观。通过前面几篇文章的分析,可以知道,
惯性导航系统的误差方程为
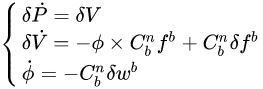
理解这段话的意思
三、初始对准
其实理解了上面的问题,那么初始对准问题就迎刃而解了。初始对准是根据gps提供的位置、速度作观测,使用kalman滤波估计出失准角,
从而得到精确姿态的过程。为了失准角是可观测的,必须通过旋转改变 的值,也就是说车要转向才行。我们经常看到组合导航在进入
的值,也就是说车要转向才行。我们经常看到组合导航在进入
导航状态之前要绕八字,就是这个原因。另外,组合导航在绕八字之前会先走一段直线,这是因为状态方程里有
,即姿态矩阵,如果它的初始值不准,那么就会带来很大的模型误差,从而使滤波器发散,走直线的时候,gps的航向角或者航迹角可以提供
一个比较好的初始航向值,从而解决这个问题,这个过程可以成为粗对准;相对的,使用滤波器精确估计失准角的过程可以称为精对准。
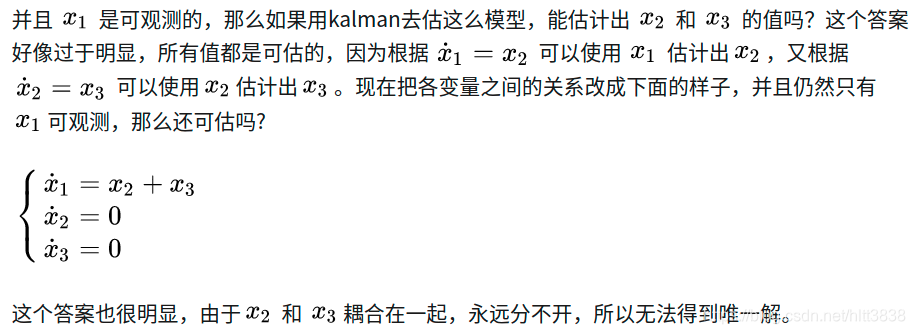
这只是分析了完全可观测的情况,对着滤波模型估就行了,很简单。但是上面还提到,静止情况下,它是不完全可观测的。真正需要深入
分析的是这种。我们同样通过方程的例子,来解释这个问题。比如下面这个方程组
显然这个方程不可解,即不完全可观测。但是我们可以得到
也就是说,如果真把上面这个模型扔给一个kalman滤波器去估计,x是会收敛到真值的,那y和z会收敛到哪呢?答案是不确定。
在组合导航的模型里,这样的状况会带来什么后果呢?假设y是IMU的方位失准角,z是东向陀螺仪的零偏(因为在IMU静止的时候,
这两个量是耦合的),那么你的姿态误差有多大,是不可控的。解决办法当然有,还用这个方程组的例子。假如我把z从方程组里面删除掉,那么就会得到

显然这个y是不准的,y的误差
即z有多大值,y就有多大误差。但是如果z比较小,那么让y里面有一个小的确定性误差,也比让它不知道会收敛到哪里去要更好。在初始对准的模型里,
如果IMU真的只能静止不动,那么往往把陀螺仪的零位从状态模型里删除掉,接受姿态里有这样一个确定性的误差。当然前提是陀螺仪的精度要足够高,
如果只是一个低精度的mems,这种做法显然是不合理的,必须使用旋转的方法把零偏估出来补偿掉才行。如果你接到任务,让你在只有gps的位置、
速度作观测的前提下,使用低精度IMU在静止不动状态下完成初始对准,你可以直接置之不理; 另外,对于低精度mems,即使在初始对准时候估计出了零偏,
由于零偏不稳定性比较大,在组合导航过程中这个零偏会发生变化,所以需要在组合的时候也一直去估计它。但是估计又需要车辆有转向,否则它和姿
态失准角之间的耦合作用会导致姿态估计不准,进而引起大的导航误差。所以使用过组合导航的朋友们会发现,在车一直沿直线行驶或停车的时候,
导航误差会变大,就是这个原因,这个被称作退化现象
四、搭建基本的组合导航系统
完成了上面两个模块的分析,现在从一个IMU到一个基本的组合导航系统的流程就算是走通了,这个过程可以用下面的框图概括。
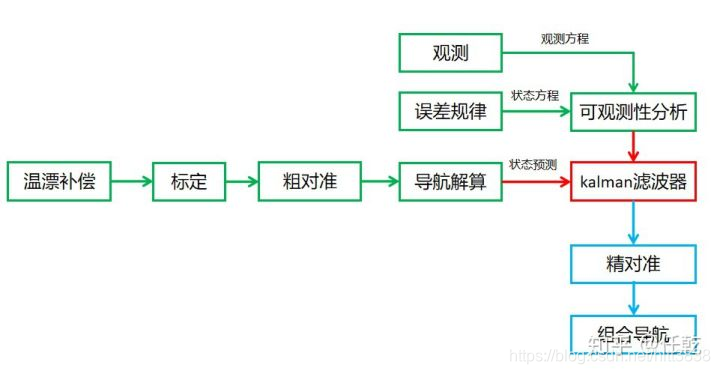
当然,这里只是完成一个最基本的系统,想要它变得更稳定,需要在滤波过程中对滤波状态做一些判断,并屏蔽掉不良观测。进一步,
还应该添加更多的约束,比如车辆的运动模型,让系统精度更高。还可以添加更多传感器,比如轮速计、磁力计,甚至雷达、摄像头等,
从而形成一套多传感器融合系统,后面我会们一起来讨论这些事情应该怎么做
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)