记录一次由于未进行win密码设置,导致开机后卡在登录界面无法登录进去的问题。最后完美解决了。
1. 背景
开机后,显示用户登录界面,但是和以往不同,没有了密码输入框,只有一个“登录”按钮孤零零地显示在屏幕中间,点击后也没有任何反应。
由于之前设置了远程登陆,所以还是可以远程登录的,登录时的登录密码已经不是值卡的数字密码了,而是账户密码。
2. 猜测原因
昨天在win的安全设置中进行了同步,然后显示需要设置账户密码,但是当时我并没有设置,想着可能要加啥新密码来着就没管。
第二天就出现了这个问题。
3. 尝试
自己尝试了网上的一些方法,比如:
- 输入以下指令:
netsh winsock reset
- 禁用多余启动项
- 使用图吧工具箱进行系统优化。
注:以上方法都是我通过远程连接进行操作的,不然前面的问题已经不允许我操作如上方法了。但是遗憾的是,上述的方法均没有作用。
4. 转机
- 随便在淘宝上找了一家店铺,知道进行修复。分别进行了以下操作:
① 按住shift重启,在疑难解答中进入安全模式:无效;
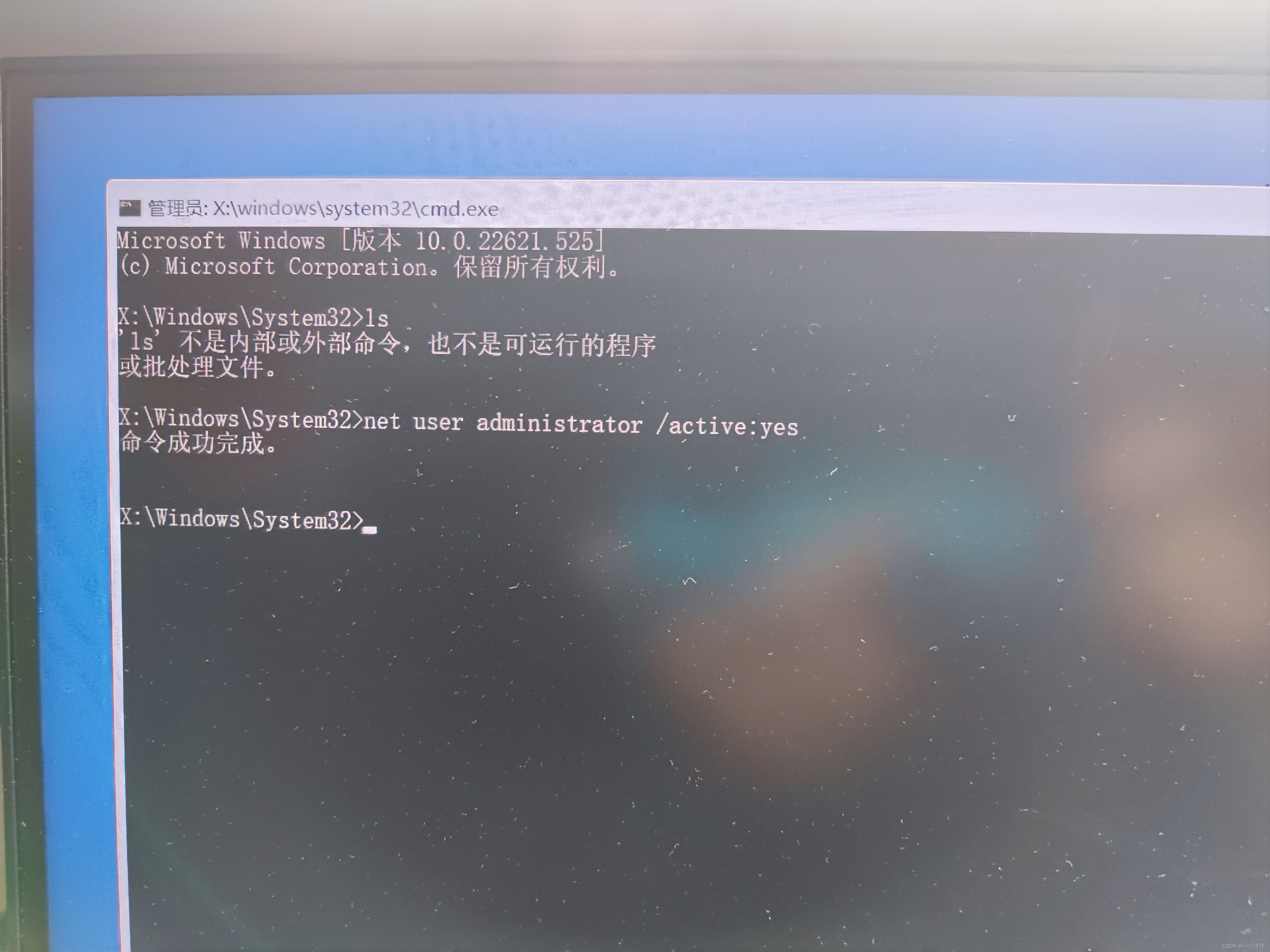
② 按住shift重启,在命令行中输入指令,创建一个新用户Admin:无效,但是我通过远程桌面重新执行上述指令创建成功了。
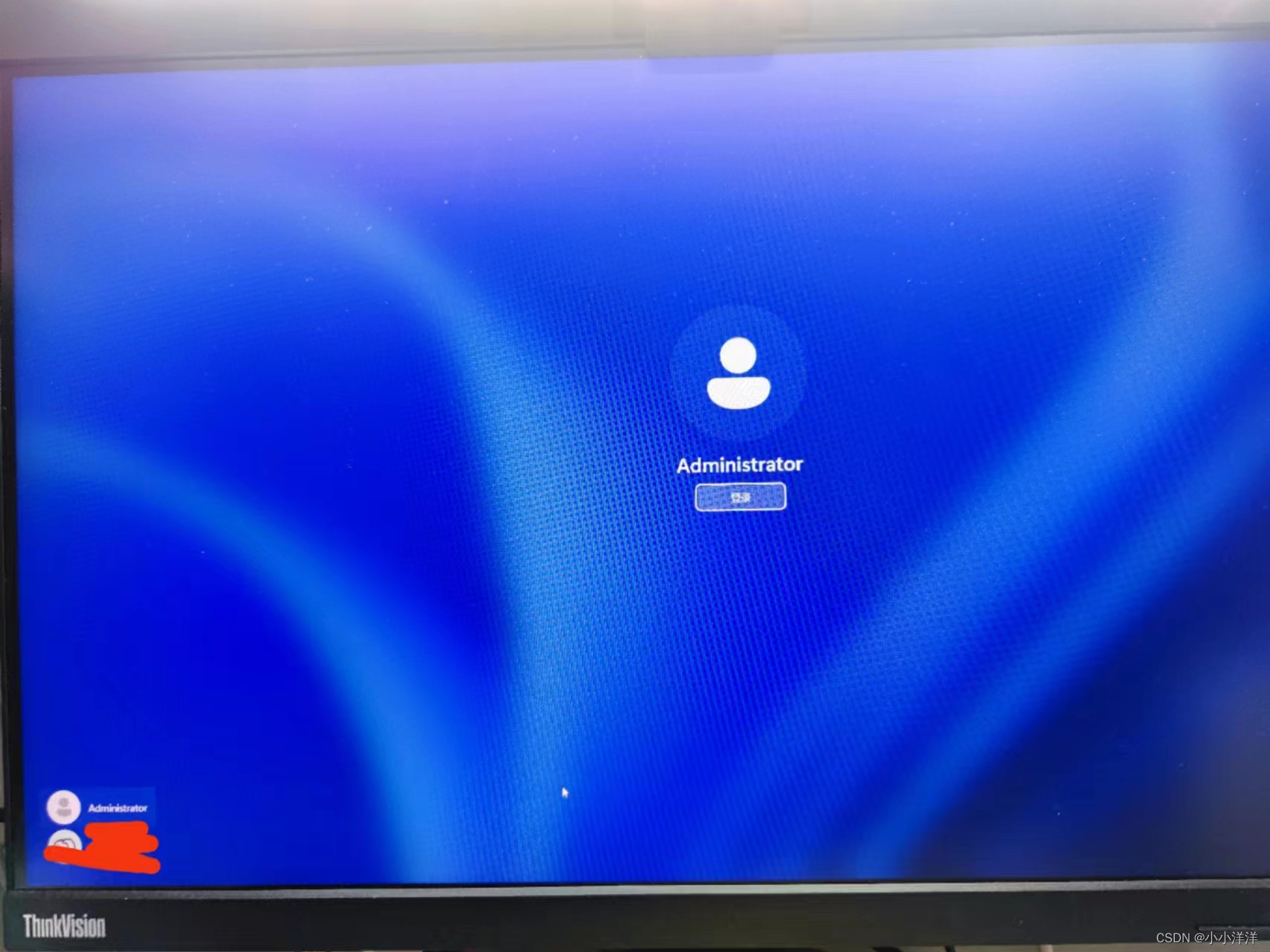
- 创建成功admin后,登录的时候就有了一个新用户,没有密码也可以进去。文件的软件大部分是可以使用的。(30大洋无了)
5. 神操作
- 上述的操作,已经是淘宝店家的所有了,虽然不能够操作回来我原来的账户,但是至少有个新用户可以进行操作,卖家说以后就用这个新用户就行了。
- 但是新用户代表默认的用户地址不一样,所以以下操作重回原来的账户:
- 在登录界面还是不能够切换原来账户,点击登录没有反应;使用任务管理器也没有原来的用户。
- 使用远程登录登录之前的账户(没有远程登录,也可以在新用户中进行设置),此时,任务管理器有之前的账户了。

- 切换用户,输入密码就可以进入了。随后在win安全设置中,添加pin密码即可。之后登录就可以输入pin密码进行登录了。

6. 最后优化
- 上述操作后,注意我们创建了一个没有密码的Admin用户,这是非常危险的。尤其我开启了公网的远程登录功能,很容易被攻击,所以要进行删除用户。
- 然而,并没有找到办法删除这个管理员用户,只能够为他设置一个复杂的密码,到此结束。
- 关闭admin账户指令(一搜就搜到了,心疼花的钱):
net user administrator /active:no
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)