Aruco的使用 By GuangyeHu
1、下载:
https://sourceforge.net/projects/aruco/files/
解压到相应的文件夹
2、安装Cmake
本次实现使用的是cmake-3.15.1 -win64版本,下载地址 https://cmake.org/download/ 直接下载installer

安装就是解压文件
3、安装opencv+opencv_contrib+cmake(一定要安装opencv_contrib,否则使用cmake编译aruco的时候会出现错误,错误显示缺少.lib文件)
opencv下载地址: https://opencv.org/releases/ 本次实现使用opencv-4.1.0
opencv_contrib源码下载: https://github.com/opencv/opencv_contrib 下载之后直接解压
opencv安装教程: https://blog.csdn.net/yunpiao123456/article/details/52538561(改变了Windows系统的环境变量,在HoloLensForCV中会导致出错,因为HololensForCV项目使用项目自带的opencv版本)
安装教程参考: https://www.cnblogs.com/jliangqiu2016/p/5597501.html
4、使用cmake编译aruco
打开cmake-gui,将”where is the sourse code:“设置成aruco-3.1.2文件夹,在aruco-3.1.2文件夹里新建一个BUILD文件夹,并经“Where to build the binaries”路径设置成该文件夹,点击configure,选择对应自己电脑的vs版本,我的是Visual Studio 15 2017,选择platform,我的是x64,然后点击finish。
ps.若设置选择错误,可点击File->delete cache清除缓存
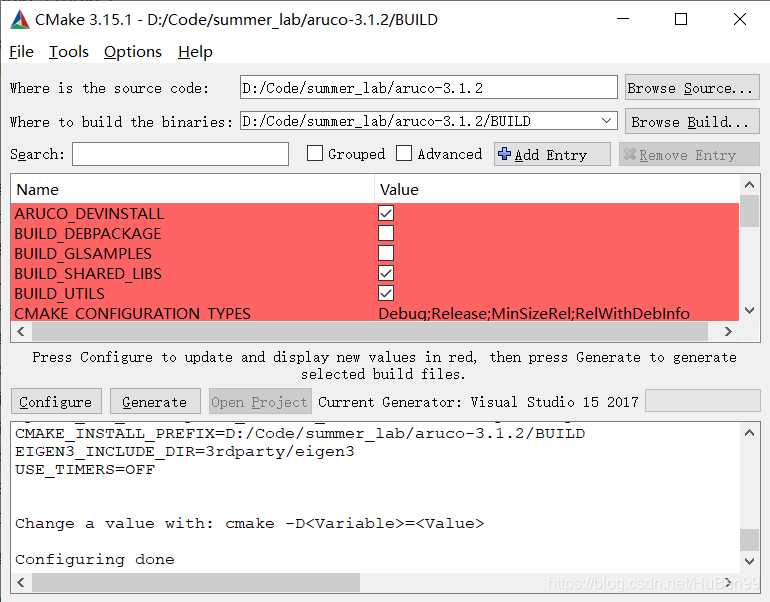
直到最下面出现configuring done,然后点击generate,出现generating done,然后点击open project使用vs打开项目。
5.标定相机的使用
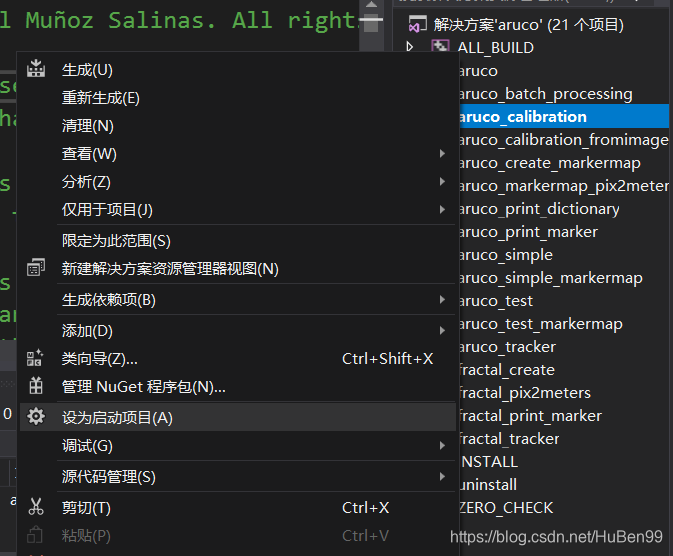
右键点击aruco_calibration,将其设为启动项目
再右键aruco_calibration,点击属性->调试->命令参数
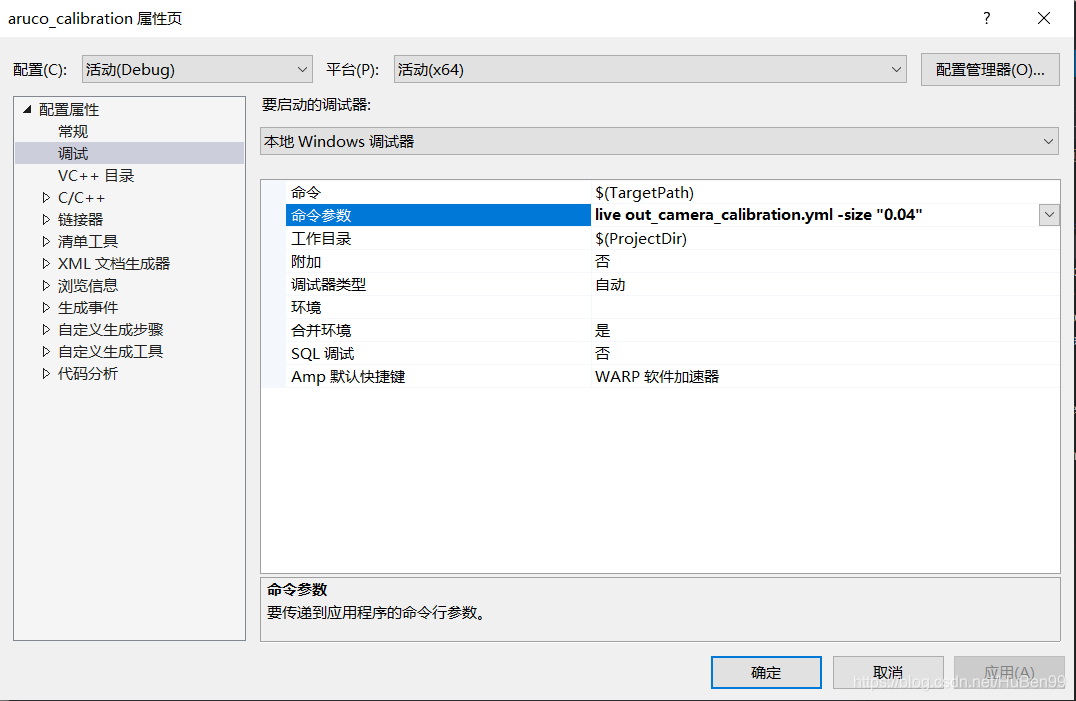
live表示打开电脑摄像头,out_camera_calibration.yml文件记录标定结果 -size "0.04"表示每一个aruco marker的大小,单位米(在现实中的测量宽度),设置完点击确定。
点击ctrl+f5启动项目,出现如下界面
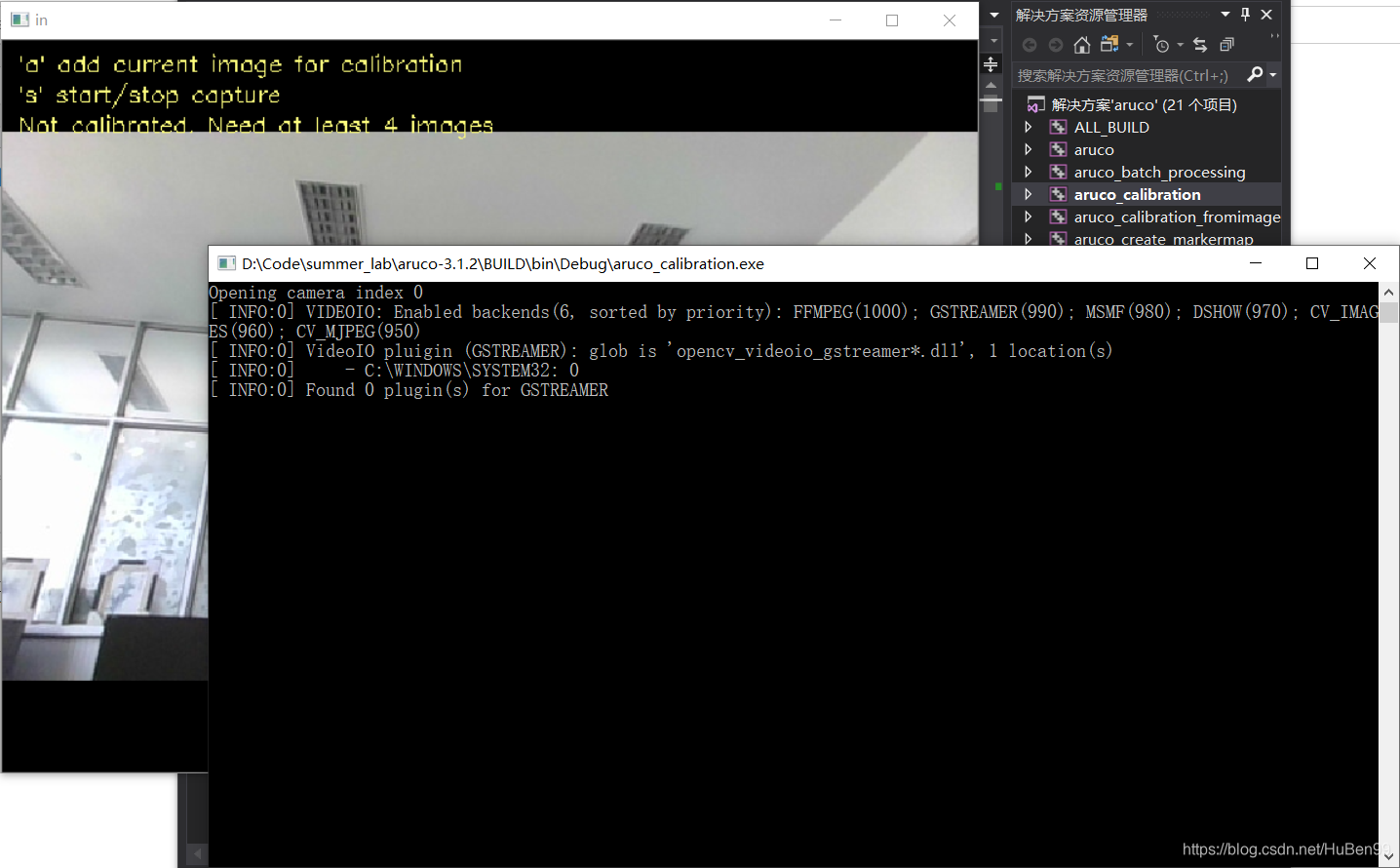
按照指示
按s是开始获取图像和截取图像,a是将截取到的图像加入标定的目录里
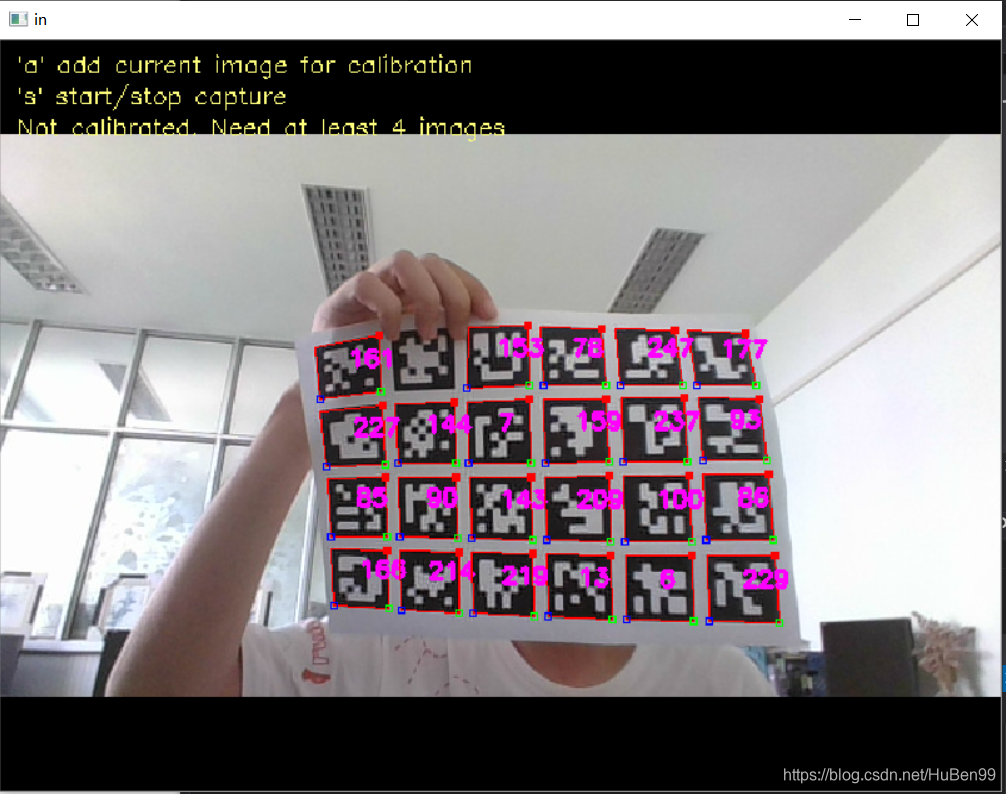
按4下s和a获取四张标定图像,程序自动进行标定,按下esc退出程序
在aruco-3.1.2/BUILD/utlis_calibration目录下可以看到out_camera_calibration.yml文件
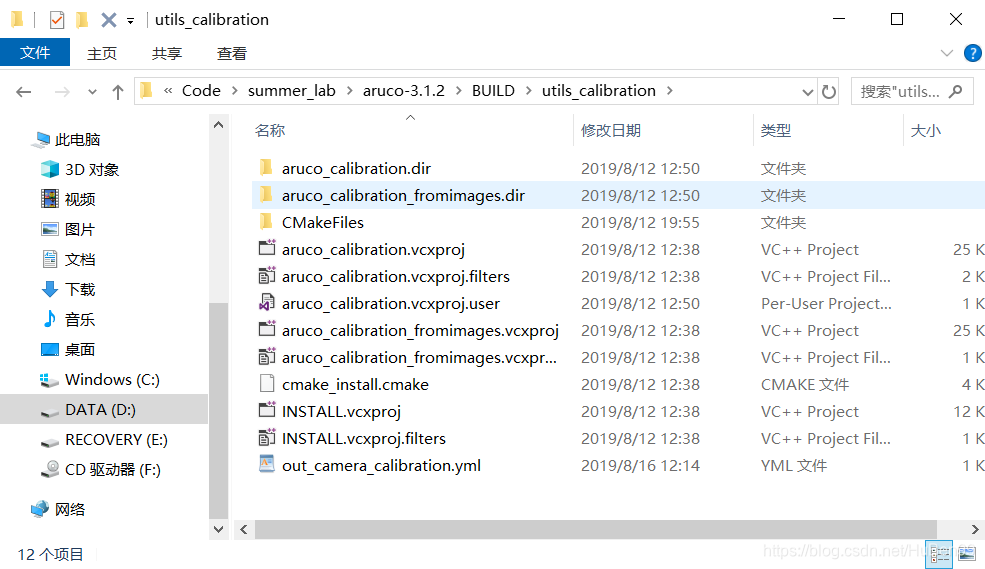
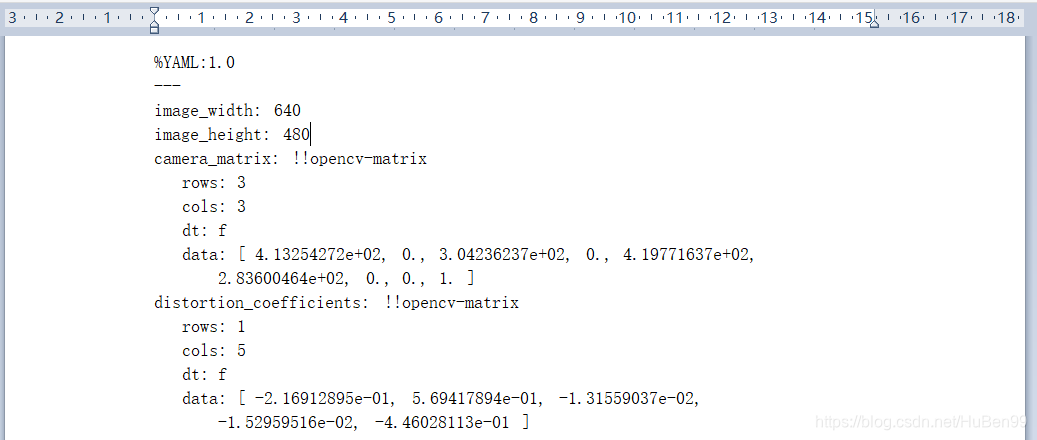
用写字板打开,得到标定结果
参考博客: https://blog.csdn.net/A_L_A_N/article/details/83657878
6、单个Marker的检测
打开项目,将右键aruco_test设置为启动项目
右键aruco_test->属性->调试->命令参数
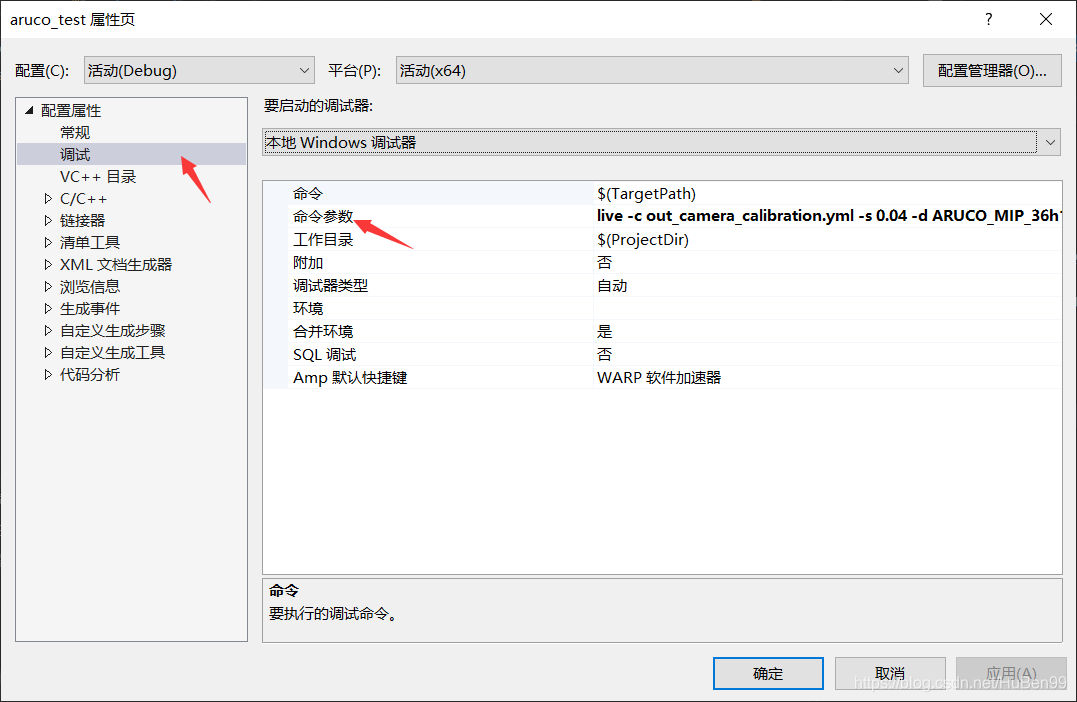
将命令参数设置如下
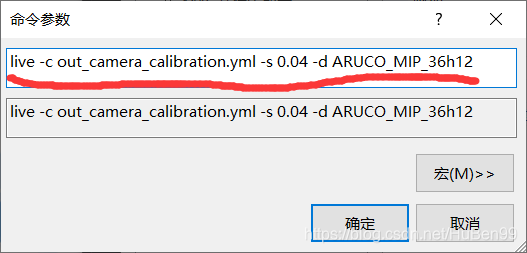
将第五步相机标定中生成的out_camera_calibratino.yml文件复制到aruco_test文件目录下,可右键aruco_test->在文件资源管理器中打开文件夹,然后粘贴,0.04为每个Marker的大小,ARUCO_MIP_36h12为检索的marker目录
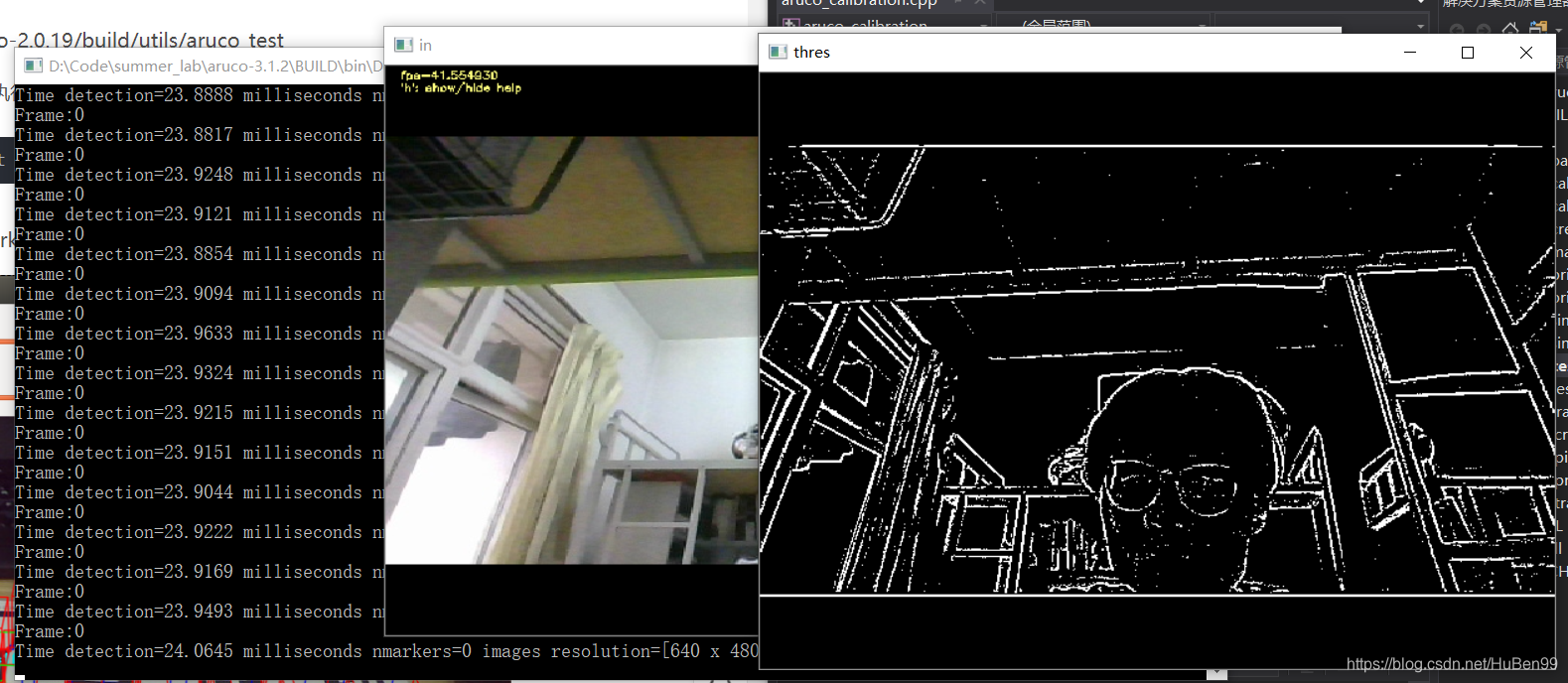
按下ctrl+f5启动项目,得到如下三个窗口
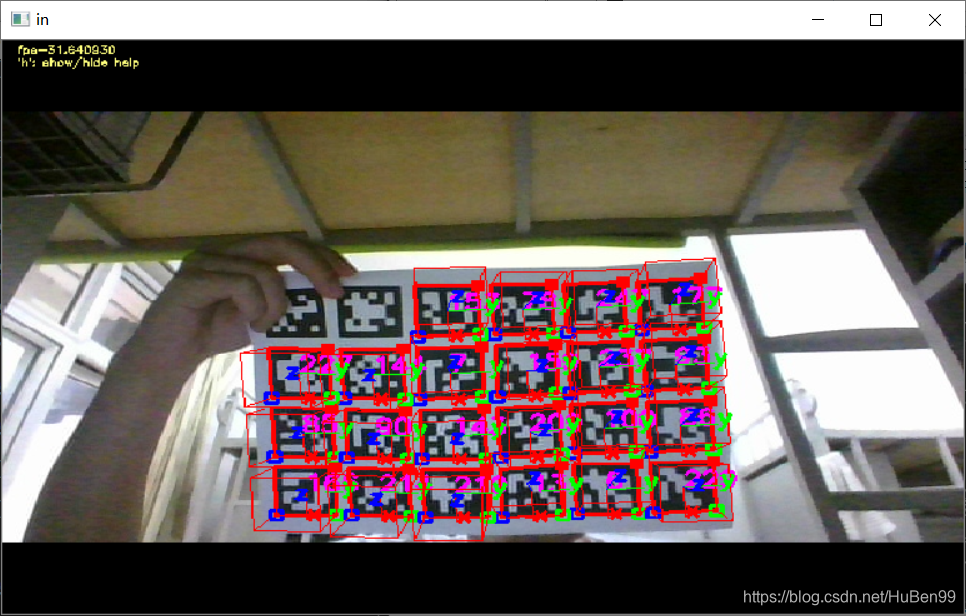
将打印出来的aruco board放在摄像头前,显示结果
参考博客: https://blog.csdn.net/A_L_A_N/article/details/83657878
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)