slam 基础之机器人学中的坐标转换学习总结_rot(z,90)_ppipp1109的博客-CSDN博客
https://www.youtube.com/watch?v=4Y1_y9DI_Hw&t=538s
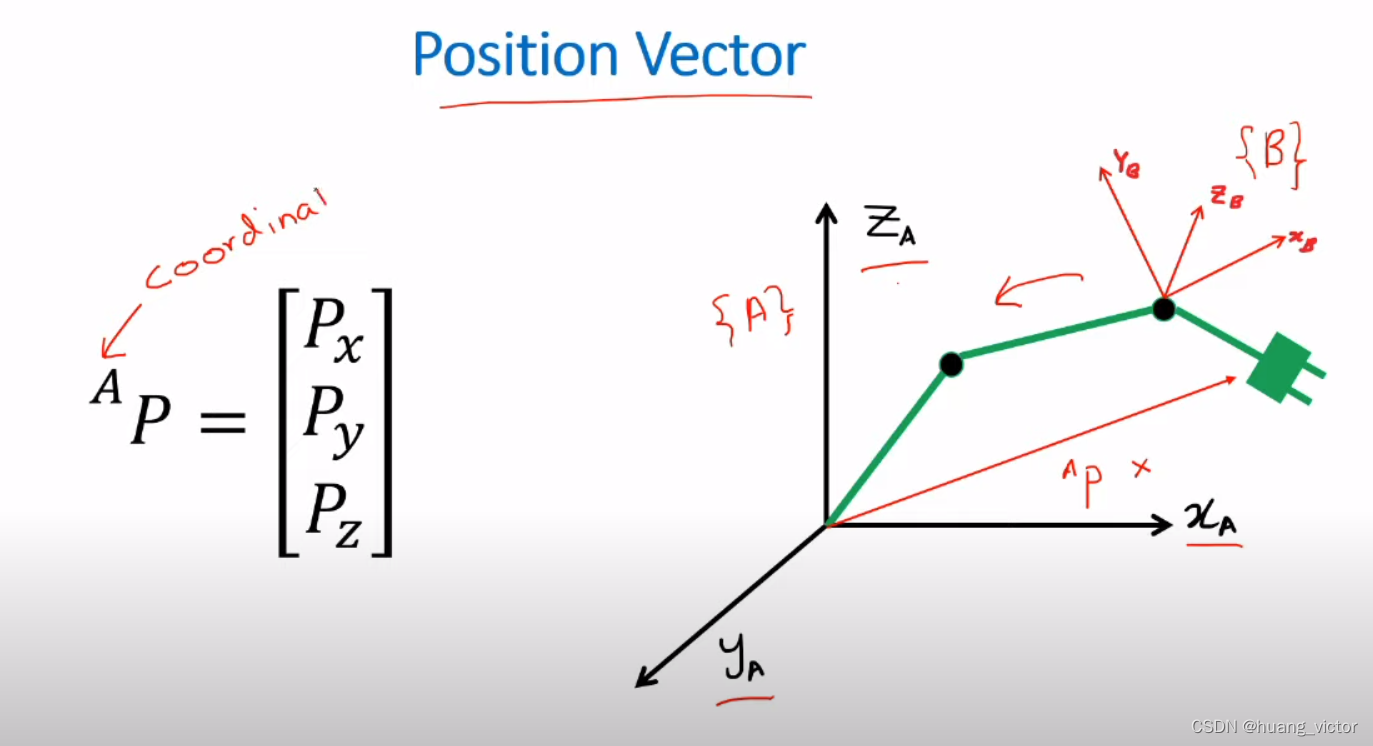
1. 平移和旋转
3D点在某个坐标系中的表示,
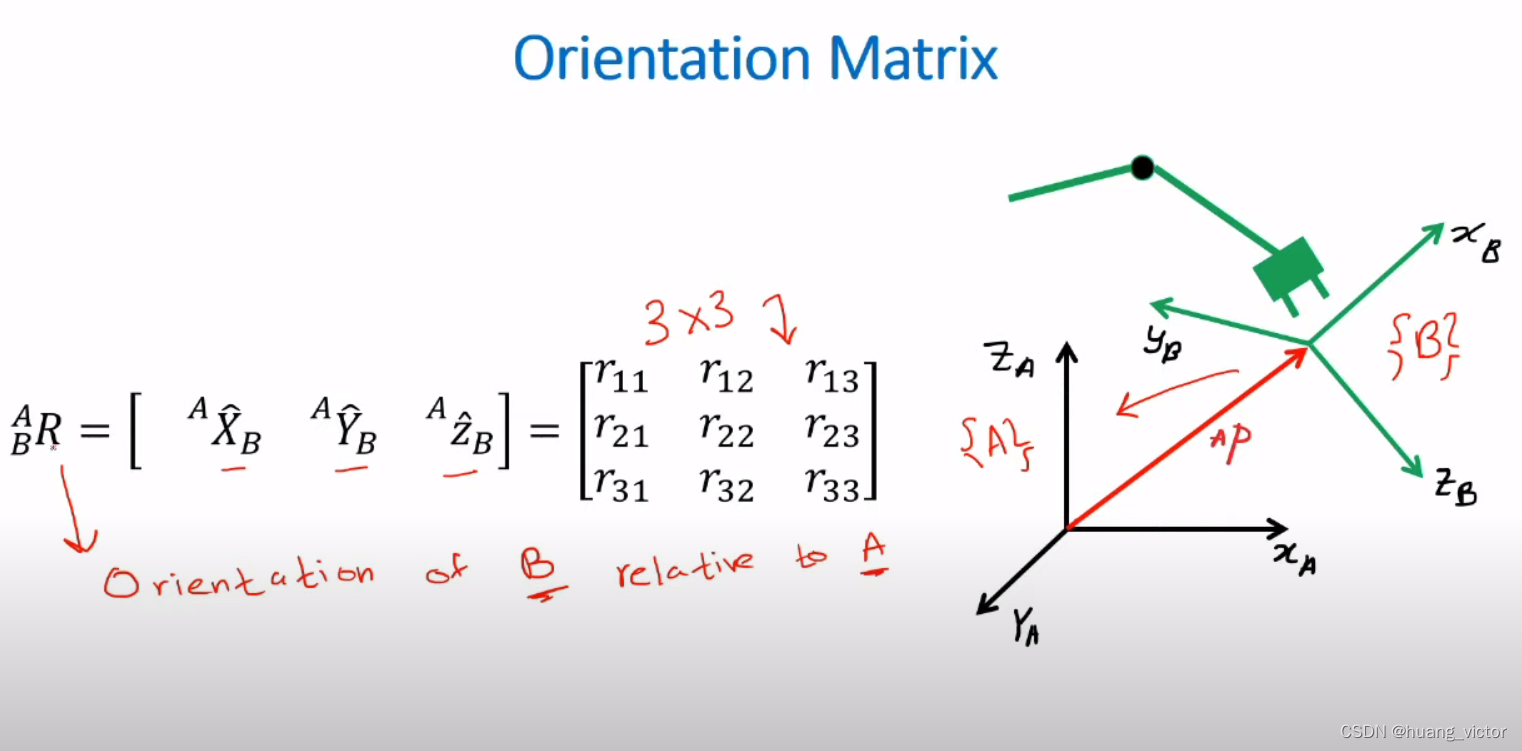
坐标系B 相对坐标系A的旋转
坐标系B中的点在坐标A中的表示,只有平移

坐标B中的点在坐标A中的表示,只有旋转

坐标B中的点到坐标系A中的表示,有平移和旋转
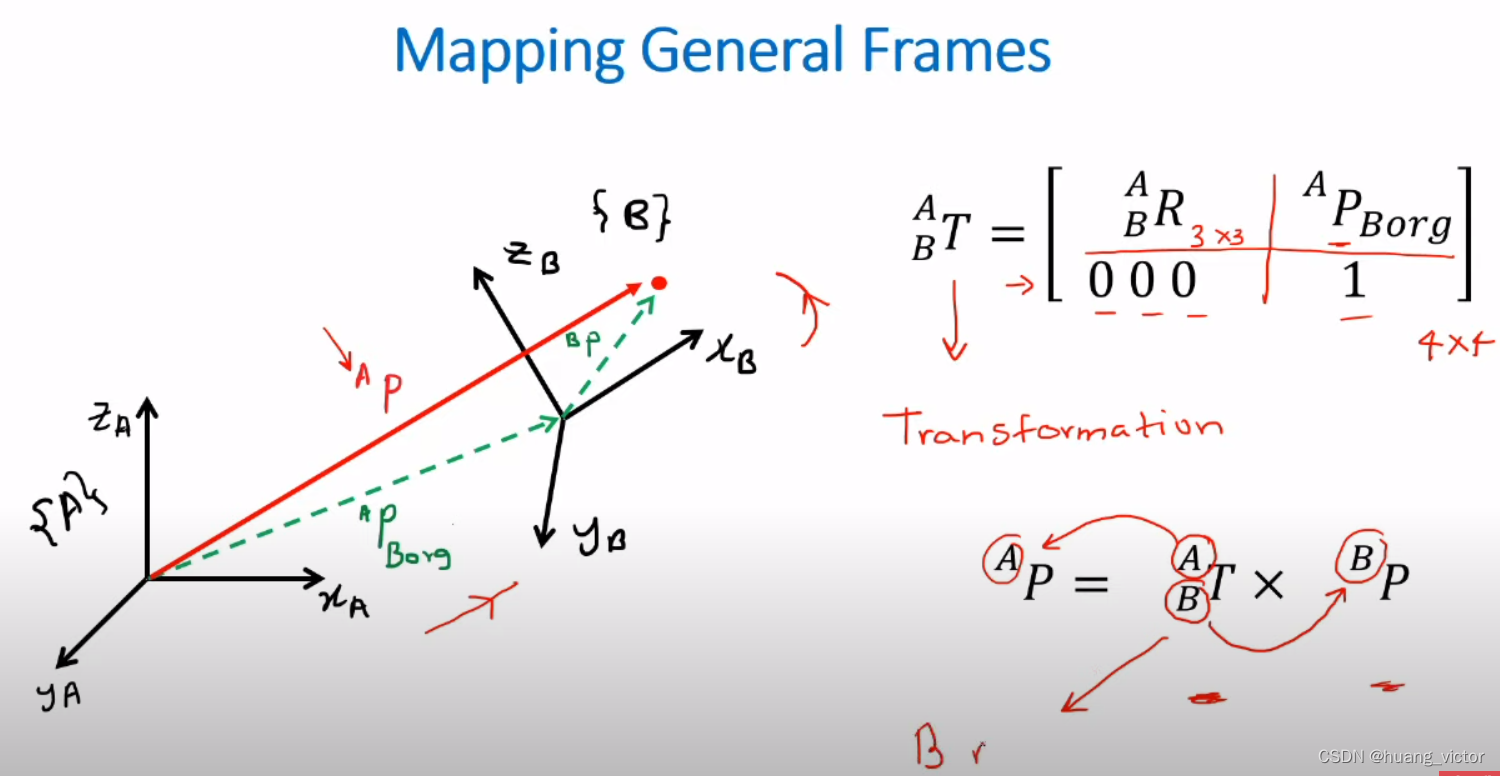
如上的表达式就可以解决,不同传感器之间外参的相互转化,相机坐标系到世界坐标系,雷达坐标系到世界坐标系,IMU、Radar等等。
2. 常见的旋转矩阵

可以用来实现坐标的转换,
2.1 已知转换之后的坐标系内点的坐标,如何求得该点在转化前坐标系下的坐标值
2.2 已知转化前的坐标系内点的坐标,如何求得该点在转换后坐标系下的坐标值
2.3 已知坐标系下某个向量,对向量做某个操作,求解操作之后的新的向量
如上问题,可以换个角度来看,也可以向量和坐标系一起旋转,那么也就是已知向量在新的坐标系下的值,已知坐标系旋转矩阵,求解该向量在原有坐标系下的值,也就是转化为了问题2.1,可以用同一个公式。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)