前面分析了启动脚本、Makefile、mkconfig,接下来就是uboot的start.S这个启动代码了,下面是本章的平台介绍:
单板:迅为4412开发板(Exynos 4412)
SDRAM:1G
EMMC:4G
Exynos 4412的启动过程可以在数据手册的Booting Sequence找到,下面只截取关键部分:
Exynos 4412 has 64 KB ROM (iROM) and 256 KB SRAM (iRAM) as internal memory.
You can select the booting device from the following list:
1. General NAND flash memory
2. SD/MMC memory card
3. eMMC memory
4. USB device
At the system reset, the program execution starts at iROM. The system reset may be asserted not
only on booting time, but also on wakeup from low power modes. Therefore, the boot loader code executes appropriate processes according to the reset status. Refer to Figure 5-1 for more information.
The boot loader is comprises the first and the second boot loaders. The characteristics of these boot loaders are:
1. iROM: It is a small and simple code to initiate SOC. It is implemented on internal ROM of SOC.
2. First boot loader (BL1): It is chip-specific and stored in external memory device.
3. Second boot loader (BL2): It is platform-specific and stored in external memory device. User should build and store this in an external memory device. It is not provided by Samsung.
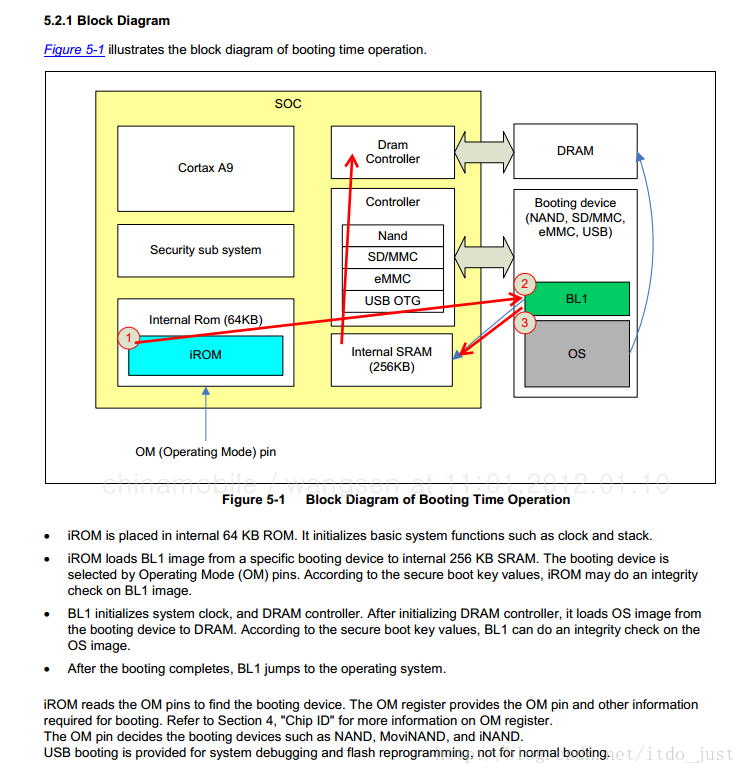
从文字和图片可以总结出如下几点:
BL0:这段是固化的代码放置在 64K 的 iROM 里面,负责初始化基本的系统功能比如时钟和栈,并且加载 BL1 到内部 256KB 的 SRAM。
BL1:这段代码由三星提供,也更改不了,BL0 会根据 OM 引脚来判断当前 booting 设备是哪个,可以是 NAND_FLASH、SD卡、EMMC、USB设备,从选定好的设备中加载 BL1,BL1 主要负责初始化系统时钟和 DRAM 控制器,然后从 booting 设备中加载 OS 到 DRAM 中去运行,这里的 OS 其实就是指 BL2,DRAM 指的则是外部的 SDRAM。
BL2:BL2 的主要功能是去加载我们的 UBOOT 代码,此后 UBOOT 运行在 DRAM上, 同样加载的时候也需要校验,这里需要将 uboot.bin 合并(merge)进BL2里面,在迅为的启动脚本里面有描述,如下:
cat E4412.S.BL1.SSCR.EVT1.1.bin E4412.BL2.TZ.SSCR.EVT1.1.bin all00_padding.bin u-boot.bin E4412.TZ.SSCR.EVT1.1.bin > u-boot-iTOP-4412.bin
做好了一切准备以后就开始执行 start.S 了,这里标题指的第一阶段基本上都是用汇编去实现的,主要负责硬件的初始化,第二阶段都是C代码,实现一些比较复杂的内容,下一章节描述。
以 start.S 的代码开始描述:
.word 0x2000
.word 0x0
.word 0x0
.word 0x0
.globl _start
_start: b reset
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq
ldr pc, _fiq
_undefined_instruction:
.word undefined_instruction//“未定义指令”的时候,系统所要去执行的代码。
_software_interrupt:
.word software_interrupt//软件中断
_prefetch_abort:
.word prefetch_abort//预取指错误
_data_abort:
.word data_abort//数据错误
_not_used:
.word not_used//未定义
_irq:
.word irq//(普通)中断
_fiq:
.word fiq//快速中断
_pad:
.word 0x12345678
.global _end_vect
_end_vect:
.balignl 16,0xdeadbeef
_TEXT_BASE:
.word TEXT_BASE
_TEXT_PHY_BASE:
.word CFG_PHY_UBOOT_BASE
.globl _armboot_start
_armboot_start:
.word _start
.globl _bss_start
_bss_start:
.word __bss_start
.globl _bss_end
_bss_end:
.word _end
.macro cache_invalidate_dcache_v7
MRC p15, 1, r0, c0, c0, 1 @ read Cache Level ID register (clidr)
ANDS r3, r0, #0x7000000 @ extract level of coherency from clidr
MOV r3, r3, lsr #23 @ left align level of coherency bit field
BEQ finished_inval @ if loc is 0, then no need to clean
MOV r10, #0 @ start clean at cache level 0 (in r10)
loop_1:
ADD r2, r10, r10, lsr #1 @ work out 3x current cache level
MOV r1, r0, lsr r2 @ extract cache type bits from clidr
AND r1, r1, #7 @ mask of the bits for current cache only
CMP r1, #2 @ see what cache we have at this level
BLT skip_inval @ skip if no cache, or just i-cache
MCR p15, 2, r10, c0, c0, 0 @ select current cache level in cssr
MOV r1, #0
MCR p15, 0, r1, c7, c5, 4 @ prefetchflush to synch the new cssr&csidr
MRC p15, 1, r1, c0, c0, 0 @ read the new csidr
AND r2, r1, #7 @ extract the length of the cache lines
ADD r2, r2, #4 @ add 4 (line length offset)
LDR r6, =0x3ff
ANDS r6, r6, r1, lsr #3 @ find maximum number on the way size
CLZ r5,r6 @ DCI 0xE16F5F16 , find bit position of way size increment
LDR r7, =0x7fff
ANDS r7, r7, r1, lsr #13 @ extract max number of the index size
loop_2:
MOV r8, r6 @ create working copy of max way size
loop_3:
ORR r11, r10, r8, lsl r5 @ factor way and cache number into r11
ORR r11, r11, r7, lsl r2 @ factor index number into r11
MCR p15, 0, r11, c7, c6, 2 @ invalidate by set/way
SUBS r8, r8, #1 @ decrement the way
BGE loop_3
SUBS r7, r7, #1 @ decrement the index
BGE loop_2
skip_inval:
ADD r10, r10, #2 @ increment cache number
CMP r3, r10
BGT loop_1
finished_inval:
.endm
reset:
mrs r0, cpsr
bic r0, r0, #0x1f
orr r0, r0, #0xd3
msr cpsr,r0
cache_init:
mrc p15, 0, r0, c0, c0, 0 @ read main ID register
and r1, r0, #0x00f00000 @ variant
and r2, r0, #0x0000000f @ revision
orr r2, r2, r1, lsr #20-4 @ combine variant and revision
cmp r2, #0x30
mrceq p15, 0, r0, c1, c0, 1 @ read ACTLR
orreq r0, r0, #0x6 @ Enable DP1(2), DP2(1)
mcreq p15, 0, r0, c1, c0, 1 @ write ACTLR
mov r0, #0 @ set up for MCR
mcr p15, 0, r0, c8, c7, 0 @ invalidate TLBs
mcr p15, 0, r0, c7, c5, 0 @ invalidate icache
mrc p15, 0, r0, c1, c0, 0
bic r0, r0, #0x00002000 @ clear bits 13 (--V-)/* 清除bit[13],异常寄存器基地址 */
bic r0, r0, #0x00000007 @ clear bits 2:0 (-CAM)/* 清除bit[2-0],关闭Dcache */
orr r0, r0, #0x00001000 @ set bit 12 (---I) Icache/* 设置bit[12],开启指令缓存Icache */
orr r0, r0, #0x00000002 @ set bit 1 (--A-) Align/* 设置bit[1],打开数据地址对齐的错误检查,即如果数据地址为非法(奇数?)地址,就报错 */
orr r0, r0, #0x00000800 @ set bit 11 (Z---) BTB
mcr p15, 0, r0, c1, c0, 0
#endif
ldr r0, =POWER_BASE
ldr r1, [r0,#OMR_OFFSET] /* 将存储器地址为r0+OMR_OFFSET(0x10020000)的字数据读入寄存器R1 */
bic r2, r1, #0xffffffc1 /* 清除r1这个寄存器的bit[0]和bit[6:31],把结果放入r2 */
cmp r2, #0xA
moveq r3, #BOOT_ONENAND//如果等于0xA了,执行这个将BOOT_ONENAND(0x1)存到R3
cmp r2, #0x4
moveq r3, #BOOT_MMCSD //如果等于0x4了,执行这个将BOOT_MMCSD(0x3)存到R3
cmp r2, #0x6
moveq r3, #BOOT_EMMC43 //如果等于0x6了,执行这个将BOOT_EMMC43(0x6)存到R3
cmp r2, #0x28
moveq r3, #BOOT_EMMC441 //如果等于0x28了,执行这个将BOOT_EMMC43(0x7)存到R3
ldr r0, =INF_REG_BASE
str r3, [r0, #INF_REG3_OFFSET]
bl lowlevel_init
ldr r0, =0x1002330C
ldr r1, =0x00005300
str r1, [r0]
ldr sp, _TEXT_PHY_BASE
sub sp, sp, #12
mov fp, #0 /* no previous frame, so fp=0 */
ldr r0, =0xff000fff
bic r1, pc, r0
ldr r2, _TEXT_BASE
bic r2, r2, r0
cmp r1, r2
beq after_copy
ldr r0, =0x11000104
ldr r1, =0x00000001
str r1, [r0]
ldr r0, =0x11000100
ldr r1, =0x00000001
str r1, [r0]
mov r1, #0x10000
9: subs r1, r1, #1
bne 9b
ldr r0, =INF_REG_BASE
ldr r1, [r0, #INF_REG3_OFFSET]
....
cmp r1, #BOOT_EMMC43
beq emmc_boot
....
emmc_boot:
#if defined(CONFIG_CLK_1000_400_200) || defined(CONFIG_CLK_1000_200_200) || defined(CONFIG_CLK_800_400_200)
ldr r0, =CMU_BASE
ldr r2, =CLK_DIV_FSYS1_OFFSET
ldr r1, [r0, r2]
orr r1, r1, #0x3 /* 进行或运算 DOUTMMC0 = MOUTMMC0/(3 + 1) */
str r1, [r0, r2]
#endif
bl emmc_uboot_copy
b after_copy
#if defined(CONFIG_ENABLE_MMU)
enable_mmu:
ldr r5, =0x0000ffff
mcr p15, 0, r5, c3, c0, 0 @load domain access register
ldr r0, _mmu_table_base
ldr r1, =CFG_PHY_UBOOT_BASE
ldr r2, =0xfff00000
bic r0, r0, r2
orr r1, r0, r1
mcr p15, 0, r1, c2, c0, 0
mmu_on:
mrc p15, 0, r0, c1, c0, 0
orr r0, r0, #1
mcr p15, 0, r0, c1, c0, 0
nop
nop
nop
nop
#endif
#ifdef CONFIG_EVT1
ldr r0, = CFG_UBOOT_BASE
sub r0, r0, #4 /* uboot的代码基地址减去4后的字数据写入r1*/
ldr r1, [r0]
ldr r0, _dmc_density
str r1, [r0]
#endif
skip_hw_init:
stack_setup:
ldr sp, =(CFG_UBOOT_BASE + CFG_UBOOT_SIZE - 0x1000)//0x43e00000 + 2M - 4K
clear_bss:
ldr r0, _bss_start
ldr r1, _bss_end
mov r2, #0x00000000 /* clear */
clbss_l:
str r2, [r0]
add r0, r0, #4
cmp r0, r1
ble clbss_l
ldr pc, _start_armboot
_start_armboot:
.word start_armboot
补充说明一下 lowlevel_init 做了什么:
#define check_mem /* 判断是否需要重载的宏 */
.globl lowlevel_init
lowlevel_init:
ldr sp, =0x02060000
push {lr}
ldr r0, =(INF_REG_BASE + INF_REG1_OFFSET)//INFORM1: 0x10020800+4
ldr r1, [r0]
ldr r2, =S5P_CHECK_DIDLE //0xBAD00000
cmp r1, r2
beq exit_wakeup
ldr r2, =S5P_CHECK_SLEEP//0x00000BAD
cmp r1, r2
beq wakeup_reset
ldr r0, =0x1002330c
ldr r1, [r0]
orr r1, r1, #0x300 /* r1和0x300或运算 */
str r1, [r0]
ldr r0, =0x11000c08
ldr r1, =0x0
str r1, [r0]
ldr r0, =0x1002040c
ldr r1, =0x00
str r1, [r0]
#ifdef check_mem /* 检测是否需要重载 */
ldr r0, =0xff000fff
bic r1, pc, r0
ldr r2, _TEXT_BASE
bic r2, r2, r0
cmp r1, r2
beq 1f
#endif
bl mem_ctrl_asm_init
bl system_clock_init
bl tzpc_init
b 1f
1:
ldr r0, =0x11000C44
ldr r1, [r0]
and r1, r1, #0x4
cmp r1, #0x4 /*uart*/
beq out
ldr r0, =0x11400084
ldr r1, [r0]
orr r1, r1, #0x1 /* GPC1(0) output high */
str r1, [r0]
ldr r0, =0x11400080
ldr r1, [r0]
and r1, r1, #0xfffffff0
orr r1, r1, #0x1 /* GPC1(0) output */
str r1, [r0]
out:
bl uart_asm_init
bl onenandcon_init
ldr r0, =ELFIN_UART_CONSOLE_BASE
ldr r1, =0x4b4b4b4b
str r1, [r0, #UTXH_OFFSET]
ldr r1, =0x1
ldr r2, =0x1003C22C
str r1, [r2]
ldr r1, =0x2
ldr r2, =0x1003C52C
str r1, [r2]
ldr r1, =0x3
ldr r2, =0x1003C528
str r1, [r2]
pop {pc}
上面的代码都进行了注解,可以总结uboot启动第一阶段的所做的事如下:
中断向量地址定义
uboot代码段、数据段、bss段定义
上电进入复位中断处理
把CPU的工作模式设置为SVC32模式
清空指令和数据的TLB
清除指令缓存ICache
关MMU
关Dcache
读取boot启动方式
选择相应boot(NAND/SD/EMMC)启动模式
进入 lowlevel_init :set sp in bl2、Memory initialize、init system clock 、uart_asm_init、onenandcon_init
设置SDRAM栈,判断是否需要重载,需要重载则点灯,读取启动信息判断从哪里复制bin,进行重载,复制uboot到指定地址即重定位uboot,使能MMU,保存 dmc density 信息,设置栈,腾出4K存放bd信息,清BSS段,执行 “start_armboot”。
针对上面可能还有些疑问:
问:根据手册,IROM初始化了系统时钟和栈,BL1初始化了系统时钟和DRAM,是不是初始化这些后 UBOOT 可以不用再次初始化了呢?直接操作即可?
答:虽然说BL1初始化了DRAM和时钟,但是这些设置我们并不清楚,也不知道是不是处在最优状态,所以最好的解决方式就是再初始化一遍,设置为我们想要的配置值
不了解各个段区别的可以看下下面的 TIPS
TIPS:
- BSS段
在采用段式内存管理的架构中,BSS段(bss segment)通常是指用来存放程序中未初始化的全局变量的一块内存区域。BSS是英文Block Started by Symbol的简称。BSS段属于静态内存分配。 - 数据段
在采用段式内存管理的架构中,数据段(data segment)通常是指用来存放程序中已初始化的全局变量的一块内存区域。数据段属于静态内存分配。 - 代码段
在采用段式内存管理的架构中,代码段(text segment)通常是指用来存放程序执行代码的一块内存区域。这部分区域的大小在程序运行前就已经确定,并且内存区域属于只读。在代码段中,也有可能包含一些只读的常数变量,例如字符串常量等
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)