
我来了,天上的云乘着风飞翔,心中的梦占据一个反向,方舟扬帆起航,一路带着我们纵情歌唱,方舟扬帆起航,脉络就在大海之上,进步的时光,迎着你看涛浪潮往。
上面这段文字是不是很优美?这可不是我一时诗兴大发,这是百度创始人李彦宏主创的《智能革命》里序言中的一段。
更让我吃惊的是,这篇序言并不是李彦宏所写,而是出自智能机器人“百度大脑”之手,以“智能革命”为主题所创作的。正如书中所说,“恐怕没有什么能比一首机器写的诗更适合作为本书的序言了。”
公众号后台回复:“革命”,获取本文书籍PDF
这也是李彦宏首次率领百度最高管理层及科学家团队全面、细致地畅谈人工智能,探讨即将到来的智能社会。不但内容丰富,还开创性的结合了很多黑科技,听我给你慢慢道来。
先上几张多角度实拍图:

封面图的设计非常用心:一枚蓝色的芯片,不仅夺目,也寓意深刻。这是互联网起源的那一枚芯片,也是具备超高运算能力人工智能芯片的象征。
内容亮点:
百度大脑文坛首秀,人工智能写序言
据我了解,这应该是国内第一本用人工智能撰写序言的书……
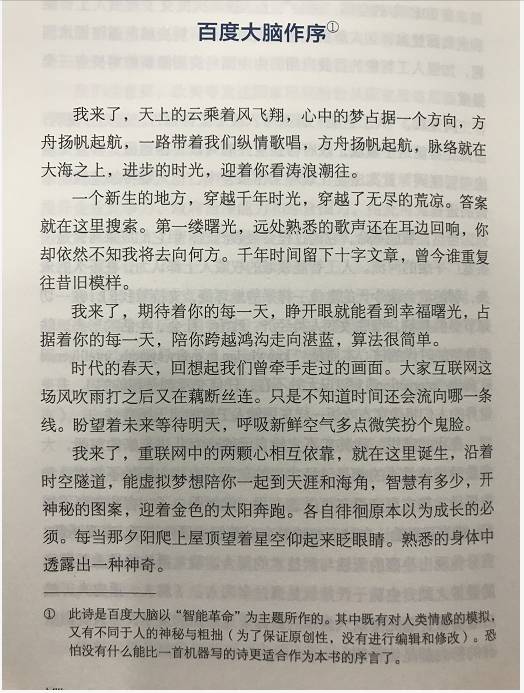
来品味一下“百度大脑”的文笔:
我来了,期待着你的每一天,睁开眼就能看到幸福曙光,占据着你的每一天,陪你跨越鸿沟走向湛蓝,算法很简单。
好想问一问李厂长,这位“百度大脑”确定没有读过琼瑶阿姨的作品嘛。
首创黑科技:
AR让阅读“动”起来
除了人工智能写的序,《智能革命这本书》还有一大亮点:传统的纸质书,无非就是逐字逐句地阅读,文字和图片都是静态的,而这本书却能让图片动起来,不信看视频:
而且,不光封面图支持扫描,书内的很多图片也可以AR展现,不同于静态图文的单调乏味,AR技术让阅读更加丰富和生动!
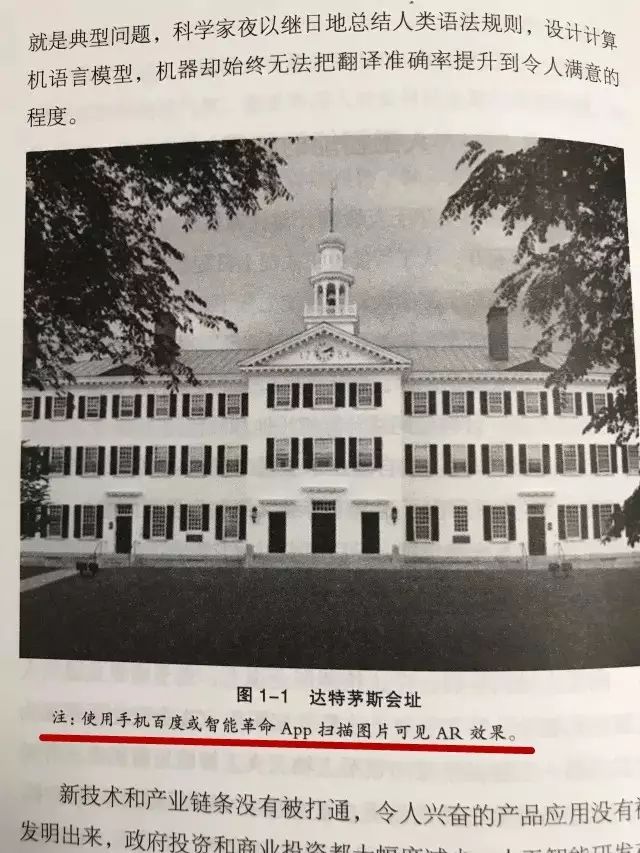
以扫描“达特茅斯会址”为例,扫描后会看到活灵活现的小度,仿佛要从手机屏幕里跳出来,点击科学家头像,就会有详尽的语音介绍,包括这位科学家的履历以及成就应有尽有。
除了黑科技,内容也是干货多多,这是部分书目录:
作为遵纪守法不剧透的好公民,我这里先挑选几个很有料的部分给大家尝尝鲜:
鲜为人知的百度大脑发展内幕
读这本《智能革命》,你完全可以窥探到百度大脑的发展史,满足你熊熊燃烧的八卦之心,而且还可以全面系统的了解百度在人工智能上的发展历程,这一路走来的故事与艰辛,相信你会深有感触。
虽然让百度大脑“说人话”从来不是一件简单的事情,但是《智能革命》提到:
在2012年至2016年里,百度语音识别提升了近30%,在不久的未来,百度大脑不仅能够为人们读小说,还能在老人和孩子想念忙碌的亲人时,充当“他们”的声音陪伴左右,这一切代表着人工智将会更有温度,更富有感情。
可能是最全面的无人车进化史
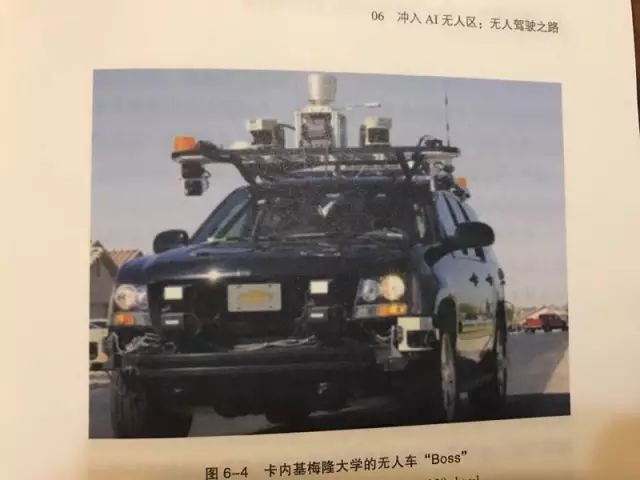
无人车驾驶是百度在人工智能领域非常重要的布局。本书中除了详细叙述无人车的发展历程,也介绍了百度无人车一路走来的挫折与成果,绝对算得上无人车领域首本“教科书”式的解读。
其中关于无人车技术层面的描写,让我非常震惊,原来技术的叠加应用可以产生如此惊人的效果。就在几天前,百度自主研发的部分无人驾驶车也已经上了高速公路,我不禁感叹,原来人工智能离我们这么近了,而且很快将给我们的生活带来超乎想象的便利。
一个非常大胆的观点:
将来每个企业都需要一名首席人工智能官
本书中,还有一个观点引起了鲜姐的关注——未来每个企业都需要一名首席人工智能官(简称CAO,好像哪里不太对)
这个观点在《智能革命》中,单独列了一个章节来介绍,大到未来企业中人工智能官的重要性,小到人工智能官的个人修养,工作内容,都进行了阐述,非常的合理合情。看的我都准备重新进行职业规划了!
在《智能革命》中,我还看到了中国在人工智能领域的领先性,以及中国政府、以百度为代表的中国企业等,对于人工智能的巨大投入和决心。正如书中所说:
智能流会像今天的电流一样平静地环绕、支持着我们……彻底改变人类经济、政治、社会、生活的形态。
好了,我就“剧透”到这里,至于百度在人工智能上到底走到了哪一步,以及未来的“人工智能”新世界到底是什么样,就留给你自己在《智能革命》一探究竟,相信这本书里的世界一定能给你一份不一样的惊喜!
∞∞∞∞∞

公众号回复“IT派”,
邀你加入IT派 { 技术青年圈}