近期接手了一些ROS机器人项目,这里将开发中遇到的问题和解决方法记录下来。
stm32强大的外设资源为机器人底层设备控制带来了极大的便利,本文简述借助rosserial项目在stm32中运行ROS节点的方法。
基本原理
ref: http://wiki.ros.org/rosserial
简言之,rosserial通过串口建立嵌入式板卡和ros master的通信,使得在嵌入式板卡上编写、运行ros节点成为可能,主要用于转接IO和各类传感器,运行底层控制算法。
要使用rosserial,需要分别在嵌入式板卡和主控PC上进行安装,rosserial项目当前支持的板卡有:

安装
由前所述,需要分别在服务端和嵌入式端安装rosserial:
服务端(PC,树莓派等)rosserial的安装
执行
sudo apt-get install ros-melodic-rosserial
sudo apt-get install ros-melodic-rosserial-arduino
随后将rosserial_stm32 库clone到catkin_ws/src目录,这些软件包提供转发功能
嵌入式端rosserial的安装和配置(stm32模板工程的建立)
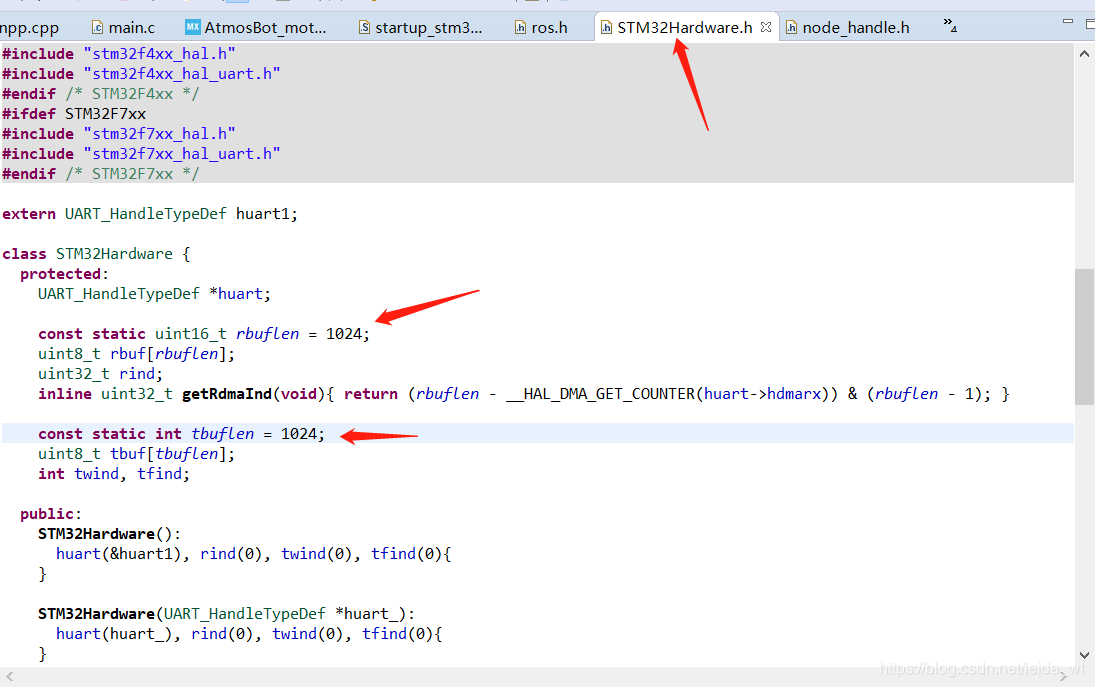
rosserial在嵌入式端的文件有两部分,第一部分是固件STM32Hardware.h和ros.h,这头两个文件提供硬件底层串口的实现和ROS协议的解析,第二部分是ros头文件,这些文件和在ROS PC端调用的并无区别,官方提供了一个脚本来自动生成这些头文件,使用时只需拷入stm32的工程目录即可。
因此,嵌入式端rosserial安装的关键在于要根据具体硬件的修改STM32Hardware.h和ros.h,使得rosserial能够调用嵌入式板卡的串口。rosserial官方已经提供修改好的固件及样板工程:
https://github.com/yoneken/rosserial_stm32
这个工程基于stm32 HAL库,并通过cubeMX工具进行配置。
接下来我们在官方文件的基础上,在STM32CubeIDE1.4.0上建立新工程。
注:关于STM32CubeIDE:近几年,ST公司将STM32CubeMX进一步升级,集成到全新的STM32CubeIDE中,STM32CubeIDE是基于Eclipse开发的集成开发环境。
如下是两个关于cubeMX工具和HAL库的教程,本文不再赘述:
http://www.mculover666.cn/posts/578764034/
https://www.waveshare.net/study/portal.php?mod=list&catid=40
此外,STM32CubeIDE默认的代码提示功能的触发条件比较严苛,可参考此处的方法调整STM32CubeIDE的代码补全策略,提高开发效率。
下面开始建立stm32工程:Ref: https://blog.csdn.net/qq_37416258/article/details/84844051
事实上,我们只需要开启并配置串口2即可,rosserial提供的固件使用串口2实现rosserial通信接口,注意开启串口DMA和中断。



注:上面引用的博客中,开启TIM2是没有必要的,后半部分也有过时的地方,如头文件的修改。
串口配置搞定后,我们进一步生成ros头文件并添加到stm32工程中,这些头文件用于提供对自定义消息、ros标准消息的支持:
在服务端执行:
rosrun rosserial_stm32 make_libraries.py .
这将在当前目录生成Inc/文件夹,里面包含需所有头文件,将这些文件拷贝到工程即可,本文模板工程中放置于RosLibs文件夹
注意,当PC端添加新包后,需再次执行以更新这些头文件
之后,在工程中建立User文件夹,将mainpp.h,mainpp.cpp拷入,后续自行编写的节点逻辑在此存放。最后,在工程main.c中调用即可。这里同时存在mainpp 和 main 两个“入口”的目的是方便C/C++混合编译。
最后的最后,设置工程的查找路径:



注:这里截图中使用了绝对路径,后续已修正为相对路径
模板工程下载
链接: https://pan.baidu.com/s/1SNI_tKaFUS6zXoIS0GWRCw 提取码: exq5
ROS节点编写
Ref: https://sudonull.com/post/31955-Rosserial-STM32
官方例程:
https://github.com/yoneken/rosserial_stm32/tree/master/src/ros_lib/examples
为控制节点发送频率,我们借助cubeMX默认开启的sysTick定时器实现频率控制。
Ref: http://www.mculover666.cn/posts/4283984198/
节点的逻辑在mainpp.c中实现,其中setup()函数放置初始化工作,loop()中编写周期性消息发送指令,如:
void loop(void)
{
if (nh.connected()){
if(HAL_GetTick() - tickstart >= 10){
HAL_GPIO_TogglePin(GPIOG, GPIO_PIN_3);
str_msg.data = hello;
chatter.publish(&str_msg);
tickstart=HAL_GetTick();
}
}
nh.spinOnce();
}
联合调试
首先在PC端给权限,USB串口插上后,通常挂载在/dev/ttyUSB0,需要线给下777权限:
sudo chmod 777 /dev/ttyUSB0
也可直接添加用户组,一劳永逸:
https://blog.csdn.net/qq_32618327/article/details/106222196
启动服务端桥接节点:
rosrun rosserial_python serial_node.py
随后借助rqt_graph工具,可看到rosserial已经建立stm32节点和ros master的通讯。
rosserial错误处理
开发ros srv时ERROR: service [/topic] responded with an error: service cannot process request: service handler returned None错误的处理方法
https://github.com/ros-drivers/rosserial/pull/414
where you find working ServiceClient.py (https://github.com/ros-drivers/rosserial/releases/tag/0.7.7)
don’t forget to update the Arduino ros_lib after step 8
Step 8.1 Delete Arduino/libraries/ros_lib
Step 8.2 Install ros_lib again (https://wiki.ros.org/rosserial_arduino/Tutorials/Arduino%20IDE%20Setup)
Step 8.3 Make Headers agian (https://wiki.ros.org/rosserial_arduino/Tutorials/Adding%20Custom%20Messages)
Step 8.4 Restart Arduino IDE( If it was Open)
Step 9
即:将现有ServiceClient.py替换为更老版本的,当前版本库的ServiceClient.py存在Bug
tried to publish before configured topic id 125错误的解决
扩大预设缓冲区,原为512

Printf打印浮点的方法

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)