众所周知,定位技术作为智能驾驶的关键核心,解决了“我在哪”的问题,与感知、决策、执行一起,构成了智能驾驶四大主体功能。
在L3自动驾驶发展落地如火如荼之际,对于定位服务的需求愈发细致严苛——
车辆基于自身实时所处的道路、车道以及道路区段,来进行后续的路径规划,以及决策是否需要进行换道操作,L3级别的ODD判断(支持L3自动驾驶的地理区域)对于这部分操作的灵敏度要求势必更高,车道级定位应用势在必行。

对于特殊路况,例如在城市峡谷环境和隧道环境,GNSS信号易受多路径干扰甚至无信号,定位精度的保证面临挑战,由此引申,全天候全场景的持续定位应该如何保障?以及如何在确保定位结果的高可用率的前提下,保障定位结果的高可靠性?这些始终是高阶自动驾驶定位服务需要攻克的重难点。
FindAUTO NSSR解决方案,为高阶自动驾驶而生
千寻位置依托强大的时空智能基础能力,一早便布局智能驾驶的高精度定位服务,经过不断的研发验证,推出了成熟完整的FindAUTO NSSR解决方案,基于星地一体高精度时空服务,为自动驾驶汽车提供7×24小时厘米级卫星定位能力,满足其感知系统在各类复杂环境下对高精度绝对位置数据的需求。
FindAUTO NSSR解决方案主要由云端的NSSR服务及终端PPP-RTK定位引擎以及完好性监控模块组成。
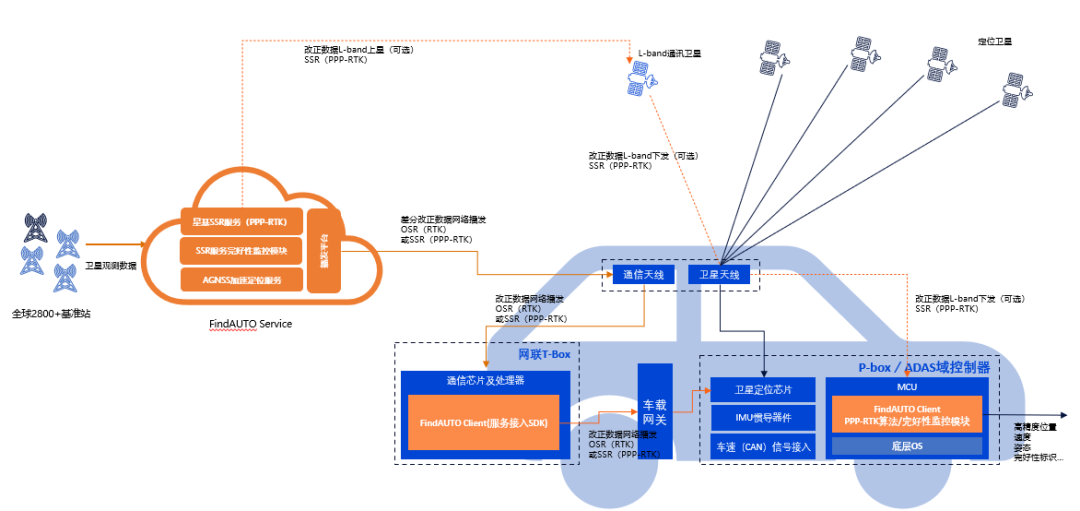
FindAUTO NSSR车端架构
实际应用中,NSSR服务以SDK的形式集成在车端的T-BOX里,而PPP-RTK定位引擎主要集成在车端的定位盒子P-BOX里。NSSR服务的获取通过车端的网络来实时获取,将获取到NSSR服务通过车载网关给到P-BOX或者域控制器。卫星天线/定位芯片,IMU惯导输入,车速输入,以及结合PPP-RTK终端算法输出基于车载高精度定位结果输出。
下面我们把三个模块逐一展开详解……
01
云端NSSR服务
NSSR服务是面向L3及以上级别高级自动驾驶场景量身打造的,采用星基增强定位技术,使用互联网播发,从服务端到终端SDK全链路具备“功能安全完好性”,目前全面支持北斗卫星系统,兼容其他主流全球卫星导航定位系统。
NSSR服务是利用基准站观测数据测定可视卫星轨道、钟差、信号偏差、电离层延迟、对流层延迟等,并向用户实时广播上述误差改正项,用户端通过PPP(精密单点定位)算法进行计算定位。
02
PPP-RTK定位引擎
PPP-RTK定位引擎集成了PPP和RTK的优点,可实现⾼精度、实时、快速定位;且服务端SSR服务具备服务范围⼴、精度⾼、隐私性好的特性,被认为是未来⾃动驾驶⾸选技术。
首先基于同样的基准站密度及分布,PPP-RTK与RTK定位精度及收敛时间基本相当。但除此之外,PPP-RTK还有如下优势:
1)更高的定位可靠性,PPP-RTK对单站的干扰或下线不敏感,无论基站个体发生什么问题,定位精度不会下降明显 ;
2)更佳的终端可用性,PPP-RTK算法结合SSR3改正数可支持断网情况下长时间的精度保持,最高可达120s仍保持在车道级;
3)PPP-RTK定位引擎满足车规级的功能安全及完好性要求。车端高精定位引擎满足ISO26262 ASIL B等级:
03
完好性监控模块
FindAUTO NSSR解决方案具备全链路的完好性,即云端一体化全链路的完好性。完好性监控模块实现了从卫星,基准站,算法,云端到终端的全链路独立的完好性监控,同时已经经过最严格的IEC61508&ISO26262的产品认证。从而保证PPP-RTK定位模块的完好性风险达到业界最高的指标。
完好性监控模块主要监控内容包含如下:
单颗卫星失效/卫星星座失效/电离层风暴/电离层扰动/对流层气流不连续/卫星钟漂移
基准站被干扰/基准站位移/基准站天线或设备故障/数据传输错误
计算平台故障/改正数算法错误/完好性算法错误/加密算法错误/编码模块错误
传感器&接收机失效/多路径/周跳/欺骗&干扰/通信链路失效、异常/解密、解码错误
针对完好性监控模块中各个可能出现的故障及错误,千寻位置也提供了完好性的解决方案:
如基准站网故障采用了基准站双设备,双专线冗余的方式来减少基准故障带来的影响;
针对算法解算平台的错误,通过双数据中心的方式来减少或者缓解计算平台错误带来的影响;
针对终端接收机失效中的通信链路失效通过双链路播发即网络播发和卫星播发两种方式来减少或者缓解因通信链路带来的失效即异常。
五维体系引领行业发展
千寻位置创建汽车高精度定位产品的“五维”体系,从精准性、可靠性、安全性、效率、质量等五个方面树立产品标准,并形成“高可靠、低成本、可信赖”的服务优势。
在这五个维度,千寻位置以领导者的表现为整个行业的发展树立标杆。
在定位精度达到CEP95<30cm(Opensky)的基础上,突破性引入应用于航空领域的完好性指标。不止于此,千寻从安全与自主可控出发,打通了全链路完好性系统,全面满足功能安全和预期功能安全,成为了国内首家实现云和端全链路功能安全,也是全球首个通过功能安全认证的高精度定位服务厂家。同时,结合云、管、端全链路的信息安全保障,为智能驾驶提供高安全等级的云端一体定位解决方案。
高标准的服务能力源于扎实的实测数据,FindAUTO NSSR解决方案先后通过全国20万公里道路场景测试,真实数据验证全场景精度指标。目前,千寻的整体高精度定位服务已经达到全国覆盖,实现多星座多频点的专有服务播发、监控和报警。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)