PH7系统简介
- PH7是什么?
狭义的PH7是一套以无人机飞控为典型应用案例,涵盖无人车或船、GCS数据采集、伺服控制、AHRS、地面模拟仿真系统等的通用控制器代码框架,该框架以Stm32CubeMx生成代码为基础,在其之上建立了分层并模块化、可替换可移植的代码框架体系,从而能够方便的在ST单片机系统间移植,同时也适用于其他型号的单片机系统。
而完整的PH7系统还包括了PH7及SinglePilot硬件控制板、控制站开发平台CSS、多轴飞行试验平台、固定翼飞行平台Cross等子系统。
- PH7软件代码框架
PH7软件代码框架基于上一代经过近百次试飞的SinglePilot飞控软件完全重新开发而成,是一套基于FreeRtos实时操作系统,可提供完整飞控功能,能非常方便进行二次开发的软件代码框架。在此框架中,用户可以方便的获取各个传感器在各个运算阶段的实时数据;能够方便的发送、接收各种遥测通讯数据和控制命令;可方便的对调参参数、航线航点、飞行黑匣子数据进行各种操作。可通过多种硬件接口及通讯协议与其他控制板进行通讯等。并在上述基础功能的充分支撑下,开发面向用户需求的各种逻辑控制功能或流程。
PH7框架为用户开发自己应用提供了现成代码框架,用户在该框架下,结合PH7提供的各种功能,即可方便的开发各种针对但不局限于无人机领域的复杂应用。PH7框架在总体架构上采用了分层模块化、可裁剪、可替换的设计思想,由底层向上分别为驱动层、框架层、算法层和应用层。中高级用户对各层级的各主要功能模块,均可进行替换或裁减,或加入新的功能模块。从而能够方便的进行硬件种类拓展、软件算法扩展或验证评估,代码移植等工作。
简单的用一个类比来说,PH7就是一套具有高完成度,针对特定领域,具备低开发门槛的超级arduino系统。试想,一套具备姿态、运动、方向、位置、大气环境、电流电压、控制输入输出等数据测量、具备强大的无线数据通讯协议(mavlink 1.0 plus)、具备参数类型及LOG类型读写存储、具备多种姿态控制,位置控制,总体能量控制(TECS)功能在内等等完备功能、经过了一定实践验证、且易于二次开发的控制代码框架,能够在科研工作及工业应用中发挥多大的作用?
目前PH7代码框架可在Stm32F429、Stm32H743为muc的单片机系统间无缝移植,下一步将拓展到国产化的GD32系列MCU。
- PH7代码框架分层结构功能:
- 驱动层
- 驱动功能管理
- 陀螺仪驱动,获取3轴原始角速度数据及元件温度数据
- 加速度计驱动,获取3轴原始加速度数据及元件温度数据
- 磁强计驱动,获取3轴磁强数据
- 气压计驱动,获取气压及大气温度数据
- 空速计驱动,获取差分气压数据
- 高速高精度AD转换芯片驱动,获取高精度高速电压数据
- Flash存储芯片驱动,提供对Flash存储芯片的数据读写
- 高精度定时器驱动,为PH7框架提供精确到us级的各种时间数据
- GPS驱动,获取各种GPS位置、运行、时间数据
- PWM 驱动,提供PWM输入控制信号读取,PWM输出信号控制功能
- USART、I2C、SPI驱动,提供MCU接口数据读写功能
- LED及其他GPIO驱动
- 框架层
- 框架层功能管理
- 调试及调试信息引擎,为整个PH7框架提供调试及字符调试信息服务
- 时间功能服务,提供各种时刻及时间段数据获取功能
- Loop 循环频率控制,提供各种频率的loop 控制及倍频控制
- Message Loop引擎,为PH7框架提供 SendMessage 及消息响应服务
- 数据总线(bus),为整个PH7框架提供具有线程的数据传输体系
- 遥测通讯协议,通过mavlink协议实现上行/下行数据传输
- 参数存储,使用板载Flash芯片提供参数类数据的读写存储
- 航点存储,使用板载Flash芯片提供航点类数据的读写存储
- LOG数据操作,使用使用板载Flash芯片提供LOG数据高速读写
- 调试控制台,提供调试串口命令控制台功能
- 上行控制命令防劫持组件
- 测试组件,为二次开发者提供各组件的测试功能及代码
- 算法层
- 算法层功能管理
- 基础数学库
- IMU数据处理、滤波
- 磁强数据处理、滤波
- 空速数据处理、滤波
- 气压数据处理、滤波
- 加速度计校准处理
- 磁强计校准处理
- 空速计校准处理
- AHRS姿态解算处理
- 位置——速度数据解算
- 飞行姿态控制
- 导航位置控制(待开发)
- 速度——高度TECS总体能量控制(待开发)
- 应用层
- 应用层管理
- 快速/普通/慢速线程功能框架
- 二次开发用户初始化代码框架
- 快速/普通/慢速线程用户代码框架
- 起飞降落模式控制(待开发)
- 飞行模式控制(待开发)
- 任务模式控制(待开发)
- 板载控制协议(待开发)
- 应急处置及围栏模式控制(待开发)
- PH7飞控板(硬件控制板)
PH7飞控板是在充分吸取上一代SinglePilot飞控板研制使用的经验基础上全新开发的新一代飞控板,具有功能集成度高、硬件配置高、扩展功能强大灵活、对外接口丰富且方便使用、重量体积紧凑,适装性好的突出特点。具体体现如下:
- 核心板+扩展板设计,目前组合为“飞控核心板+通讯及电源板”模式。该模式下的两板可组合也可独立使用,飞控板可作为各种无人设备控制板使用,扩展板可作为单独电台模块及电源板使用。此设计模式下,核心板+扩展板可拓展为多级级联方式。如核心板双机热备方式等;扩展板可拓展为图传数传二合一通讯板、互联网接口板等等。PH7飞控板硬件设计框图参见附件一
- MCU为STM32H743,运行速度6倍于上一代SinglePilot飞控的Stm32F429,2倍于Stm32F7。机载Log存储为板载Flash+TF卡双模式,板载Flash容量2倍于SinglePilot飞控板。
- 6 x PWM in,12 x PWM out,除常规预留 gpio、普通adc、uart、i2c、spi等扩展外,还具有高精度高速独立AD芯片负责空速测量、高精度扩展 AD 测量。预留RMII 扩展接口供将来 Ethernet 网络通讯。总计88 Pin对外扩展接口,具备强大的系统扩展性能。
- 板载Flash+e2prom双模式机载参数参数存储系统
- ADXRS620+ADXL354 工业级imu,均带温度补偿测量,跳线支持ADXRS620升级为战术级陀螺ADXRS646
- 航位推算GPS导航
- 3路独立大容量电源供电设计
- 支持以板载或外接形式的空速、磁强、电源设计,

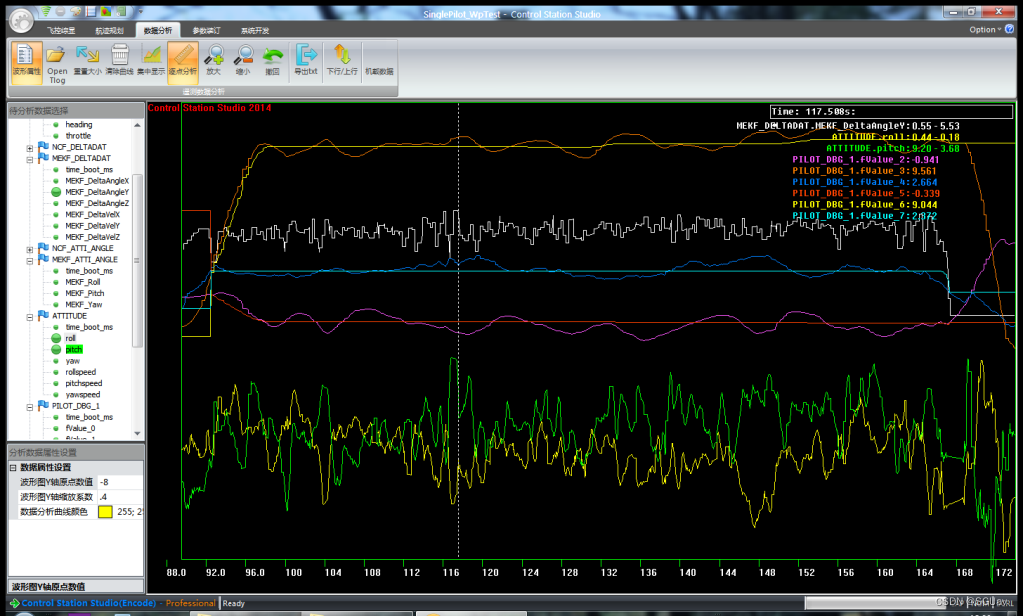
- Control Station Studio 控制站开发平台
CSS定位于无人系统(无人机/车/船等)控制终端软件开发平台,可快速且灵活的构建用于无人机/车/船等无人系统的软件控制终端。CSS具备以下三点突出特性:
- 用户的全部显示及操作界面、内部数据构成、数据通讯协议、运行控制逻辑均可快速定制及搭建。
- 使用CSS搭建的控制站之间可进行任意拓扑结构的组网及协同工作。同时提供sdk 可实现CSS与其他应用程序间通讯组网。
- CSS具备插件扩展机制,并提供插件工程源代码,用户能够根据自身需求对CSS功能进行任意扩展。

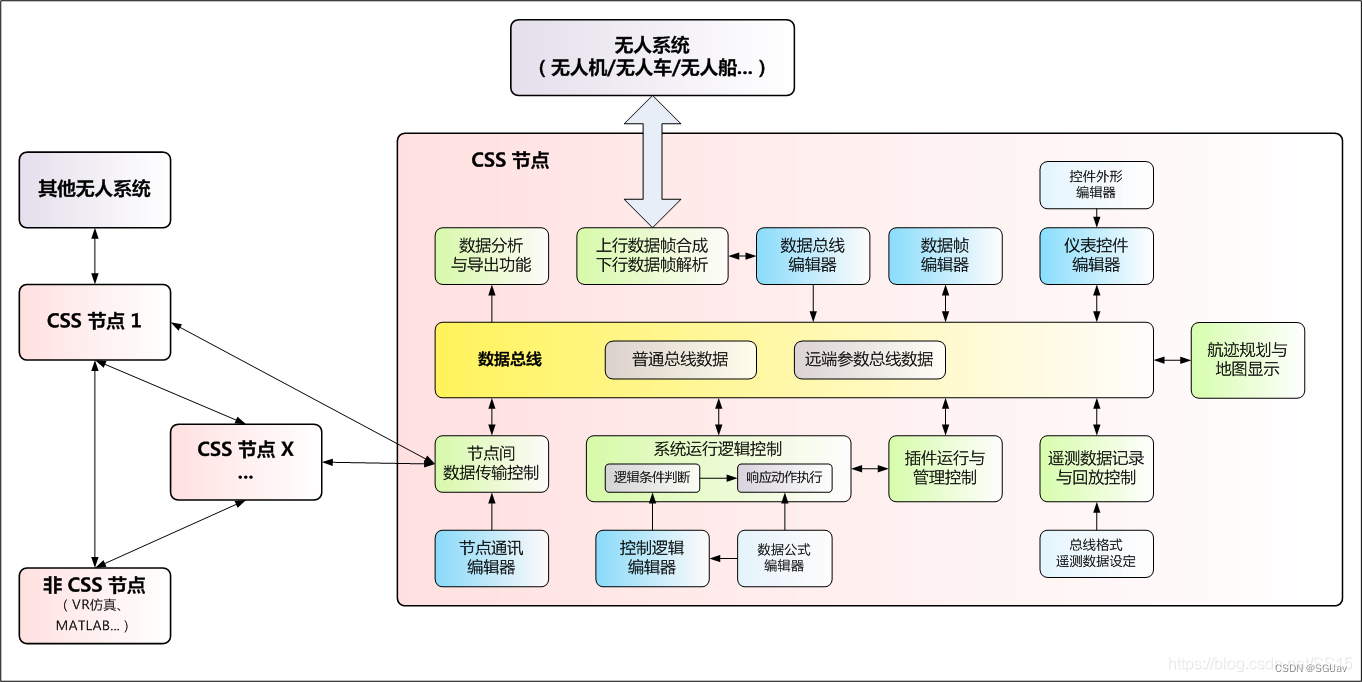
CSS 系统构成示意图
基于以上特性,用户可在极短时间内根据自己系统特点,使用CSS构建出最终所需要的控制站终端软件系统。还可根据不同的工程阶段,随时调整控制站的功能及侧重点。对其人机界面、数据构成、通讯协议、控制逻辑等功能进行任意修改及定制。此外,CSS还彻底解决了不同的无人系统需要重复开发不同控制站而带来的大量重复性工作及开发效率低下的问题。
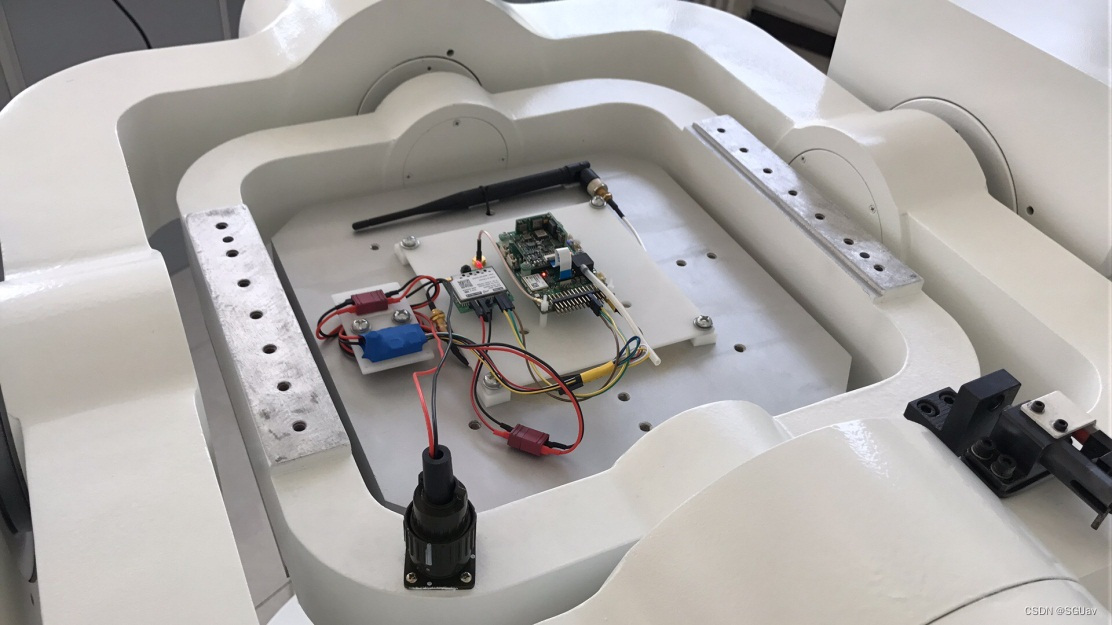
CSS套件能够与诸如MATLAB、多自由度运动转台控制程序、虚拟仿真程序等第三方软件进行数据通讯,从而为研究、开发提供了更高效和多样化的手段,将开发与应用无缝连接。
CSS的插件扩展机制,为其自身的控制功能扩展、数据通信协议增加,以及其他控制硬件设备的引入提供了坚实的基础。
CSS在设计实现中实现了各关键功能的核心代码,具备完全自主知识产权,不受第三方在技术上、商业上的种种限制,可随时根据用户的需求而定制修改。
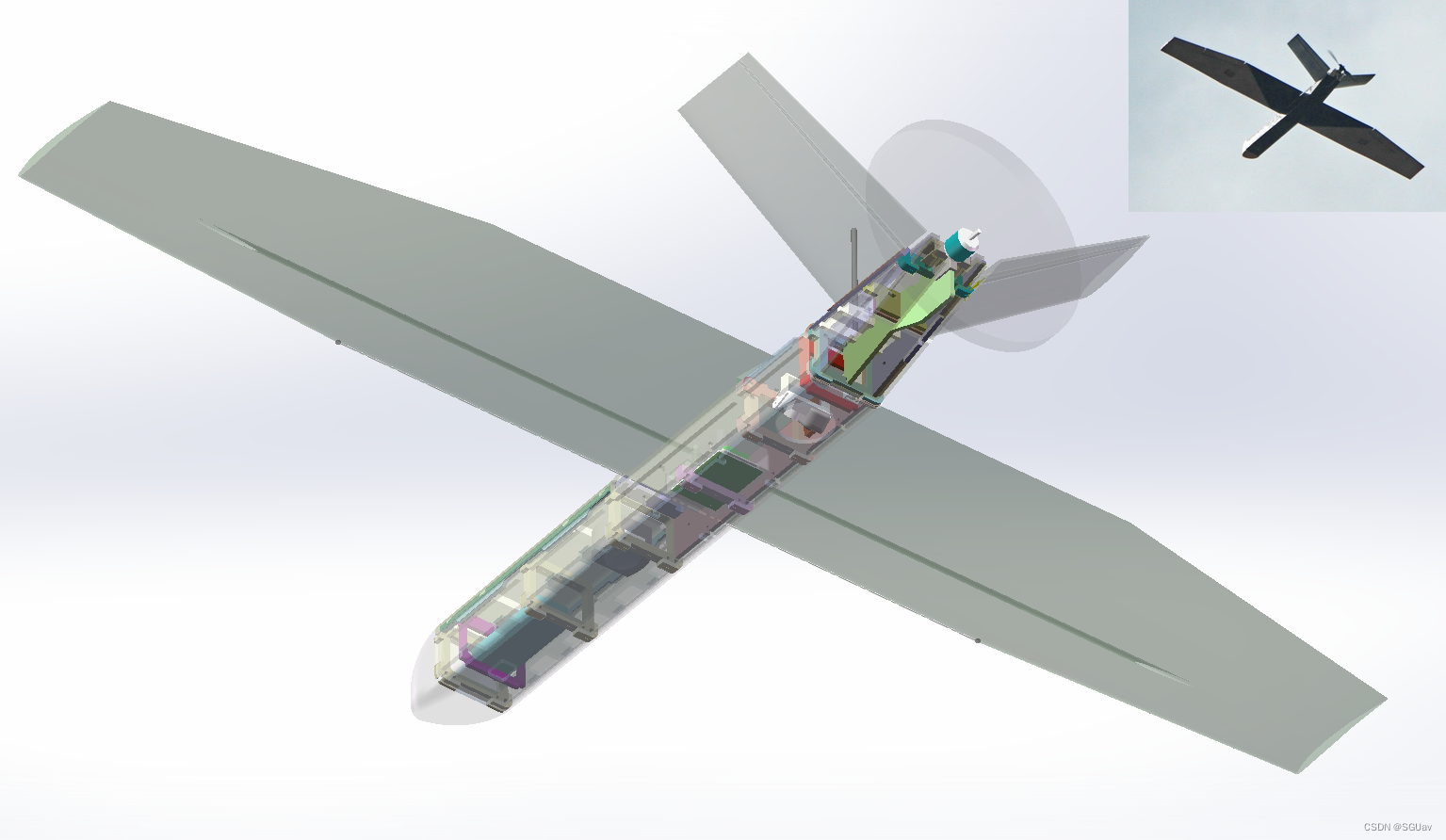
- Cross 固定翼平台
Cross 固定翼平台是基于在以前实验试飞SinglePilot飞控过程中使用实验机发展而来,历经近10个版本的改进迭代,目前不仅飞行气动性能经过了充分的测试,而且在使用维护细节、生产工艺流程方面均基本成熟固化。
Cross固定翼平台在该级别平台中,具有较高飞行气动性能,充足的舱室空间、牢固的机体结构、便捷的维护维修性能,以及便捷的携行及展开特性。与此同时还具有制造成本低廉的优势。
Cross固定翼平台主要面向科研研发领域以及军事背景应用。尤其对诸如视觉制导、编队集群、侦察探测等研发领域,以及弹药投掷等应用领域进行了特定设计优化。



-
- Cross固定翼平台基本参数(飞行实测数据):
- 标准翼展:1.6米(模块化设计,可根据需要在1.4至2米间组合)
- 标准翼面积:36dm2
- 机 长:1米
- 标准起飞全重:1350g(含100g任务载荷)
- 标准任务载荷:100g
- 最大任务载荷:1000g(暂定)
- 标准飞行时间:40min(实测落地电压11.3v)
- 标配动力电池:2200ma,3s,20c锂电
- 巡航速度:15m/s
- 最小失速速度:7米/s
- 无动力滑翔比:15(实测)
- 起降方式:弹射起飞、滑降
- Cross固定翼平台突出特点:
- 较高飞行气动性能
Cross平台总体在设计上贯彻了低翼载荷+高升阻比的思路,定位于电动小型长航时机型。采用了根据典型使用环境参数确定的主翼高升阻比翼型,减小翼尖诱导阻力及防翼尖失速设计,大直径低速螺旋桨等系列气动措施。在结构设计上大量采用新型泡沫材料及展宽碳纤布材料。从而使该平台具备了较大的升力储备、较高的升阻比特性,以及牢固的机体结构。
以“大鸦”机型作为参照对象,Cross平台在与大鸦平台具备相同的整机升力,更好的抗损性能的同时,整机空重仅有大鸦的1/3。这就意味着Cross平台在续航时间或及任务载重方面具备巨大的潜力和配置灵活性。飞行航时有效载重是一对相互制约的飞行参数,保守估计,在现有动力配置条件下,若以牺牲一定航时为代价,Cross平台的有效载重不小于1000g,且保持较为优良的飞行品质特性。因为此时Cross平台起飞全重(2200g)依然明显小于大鸦(3200g)!。
- 牢固的机体结构
Cross平台创新的XPP泡沫(高压微孔聚丙乙烯泡沫)框架 + 碳纤蒙皮机身材质结构赋予了机身具备坚固且有一定韧性的特性。通过多次试飞表明整机具有良好的耐粗暴操作及耐重着陆特性,能够多次经受1-2米高度跌落冲击考验且不会产生累积性破坏效应。甚至还有整机从近10米高度大角度俯冲触地(干泥地)后,机身仅有轻度且非永久性损坏的记录。
事实上,Cross平台的坚固性能不仅来自于机体材料的创新使用,更来自于大量飞行实践汲取教训经验后的持续改进。
- 良好的勤务性能
Cross平台的勤务性能包含日常维护、携行展开、故障修复三方面。日常维护方面,机体背部开有多个大型维护舱门,利于日常维护及设备装卸。携行展开方面,Cross平台采用主翼对插、尾翼可拆卸设计。全套平台含控制、弹射、维修工具等设备可装入一1.2 x 0.3 x 0.2米的背包内,利于单兵携带。故障修复方面复材蒙皮及机身机构在损伤后可方便的进行修复。
- 上一代SinglePilot 飞控系统
SinglePilot 是我们开发的上一代飞控系统,包含了硬件控制板和飞控软件。该飞控系统可实现多轴和固定翼平台的多种自主飞行模式控制。通过大量的实际飞行实验及测试,验证了该飞控系统,尤其是固定翼模式下核心技术的可靠性及稳定性。飞控系统姿态测量、飞行姿态控制、导航控制、起降控制,系统的可靠性、电磁兼容性、对温度变化的适应性均取得了较满意的实际测试结果。飞控系统在较大风速(6-7米/秒)、飞行平台气动外形受到破坏(单侧机翼缺失1/4)、冒雨飞行等恶劣条件下飞行的稳定性经受了考验。
另一方面,受限于当时开发时间限制以及开发重心转移,SinglePilot 飞控系统在飞控关键核心技术取得突破且验证效果较满意的情况下,SinglePilot的控制软件部分停止了进一步的开发和更新。我们在此方面的工作重点,转移到了开发全新一代PH7通用控制代码框架上来。至于SinglePilot的硬件部分,则继续延续成为了PH7系统的一部分。

SinglePilot飞控板
- SinglePilot 飞控板规格:
- Stm32F429 MCU
- ADXRS646 陀螺 + ADXL22293 + HMC5985 IMU
- MS5611 气压计、UBlox M8N GPS、MPXV7002DP空速计
- AT45DB32 32M Flash
- Pwm in x 4,Pwm out x 6
- SinglePilot 飞控板软件简要特性:
- 支持固定翼/多轴飞行平台
- AHRS更新频率250Hz
- 下行遥测数据更新频率25Hz
- Log数据记录频率10Hz,记录时间90分钟
- 固定翼飞行模式:自稳、定高定速、航线、紧急返航、盘旋。
- 多轴飞行模式:定高下自稳、航线、自动起飞
- 调试及命令行控制台
- 板载扩展控制串口,任务载荷可通过该接口对飞控实施飞行控制,共享下行通讯链路
- 多轴平台
260多轴平台主要用于多轴飞控研发测试,以及需要使用多轴平台作为载体进行软硬件研发的小型系统进行飞行试验及测试,其突出特点:
- 安全性高。作为实验平台,最大的风险来自于失控。260多轴从平台整体角度设计的保护措施能够对实验人员、设备,以及花花草草提供充分可靠的保护。
- 皮实耐摔。同样是基于整体设计的抗损性优势,260多轴平台具有相比同类产品更优异的抗损性能以及更短损坏后修复时间。有利于研发人员集中精力在实验设备自身的开发,而无需耗费过多的时间和精力成本在飞行平台自身的维护维修上。
- 经过多次实飞实炸考验,该平台1至2左右米高度无动力单次坠落,落地姿势基本正确的话,可以保证机体无损,检查后可马上重新进行飞行。若花式翻滚落地,或者多次连续坠地,可以保证核心航电不被严重破坏。另外,该平台的模块化设计令易损件更换方便。
- 260级别轴距,2204电机,700g 左右起飞全重动力储备还算充足,抗风能力还算可以。能够搭载适当的载荷。设备安装空间相对充裕。3叶桨航线飞行时间6:30s,5叶桨7:30s
- 拔插式电池,使用方便安全。利于执行高密度试飞测试任务。