无人机的降落要实现对飞行轨迹和飞行状态的精确控制,对目标地点的精确定位与识别,而海上无人机降落具有更多不确定因素,现提出一些有效方案,以使得无人机海上起降成为可能。 无人机起降条件:低风速,平稳场地,GPS信号良好,对于视觉定位方面需要有较明显的标志。可以看出在海上降落平台能够满足的条件只有Gps信号与明显的视觉定位标志,低风速和平稳场地条件较难满足。 国内外的发展情况,当前垂起无人机在海上平台的降落主要依靠明显的视觉标识定位结合Gps反馈的位置信息,能够满足在船体移动速度缓慢,海上风浪不大条件下的精准降落.
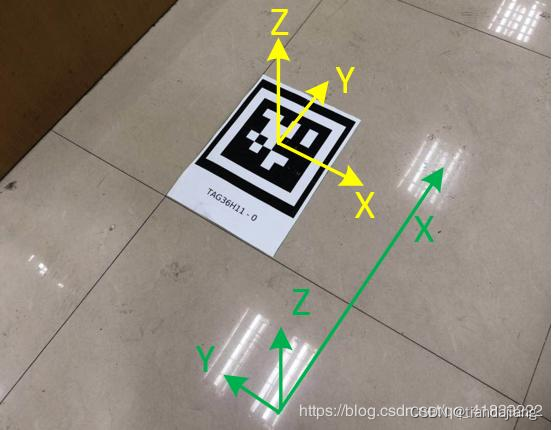
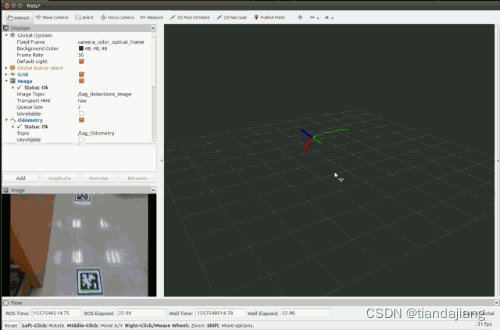
volarious公司基于大疆无人机平台做出视觉定位降落海上平台,海上船体在低速航行,海面风浪较小的情况下实现了精准稳定降落,具体实现通过降落平台多个定位点,达到对降落平台位置姿态的精确识别,并在降落过程不断调整无人机下落位置。 Apriltag二维码 应用目标大小估计,测量相机到目标的距离,3D 定位,自主导航。 无人机位置获取:通过二维码识别,可以得到相机坐标系下二维码中心位置,进行两次坐标系变换后可得到无人机中心位置在二维码坐标系位置。 降落平台姿态获取:通过识别多个二维码位置获取解算降落平台姿态。
海上降落平台会因为海浪,海风的影响剧烈晃动,这使得无人机垂直起落变得十分困难,海上降落平台的晃动具体体现在降落平面的晃动和z轴上的上下波动,当前的大部分解决方式是在降落平面安装稳定系统。 降落平面稳定系统,三轴陀螺仪及加速度计解算相对偏转,在使用稳定控制机构对相应的偏转进行补偿。