文章目录
- 引言
- 一 环境搭建
- 二 简单入门
-
- 三 编译多个源文件
- 3.1 在同一个目录下有多个源文件
- 3.1.1 简单版本
- 3.1.1.1 项目结构
- 3.1.1.2 示例代码
- 3.1.1.3 运行查看
- 3.1.2 进阶版本
- 3.1.2.1 项目结构
- 3.1.2.2 示例源码
- 3.1.2.3 运行查看
- 3.2 在不同目录下有多个源文件
- 3.2.1 项目结构
- 3.2.2 示例源码
- 3.2.2 运行查看
- 四 项目级的组织结构
-
- 五 动态库和静态库的编译控制
- 5.1 生成库文件
- 5.1.1 项目结构
- 5.1.2 示例源码
- 5.1.3 运行查看
- 5.2 链接库文件
- 5.2.1 项目结构
- 5.2.2 示例源码
- 5.2.3 运行查看
- 六 条件编译
- 6.1 简单程序
- 6.1.1 项目结构
- 6.1.2 示例代码
- 6.1.3 运行查看
- 6.2 添加编译选项
- 6.2.1 生成部分指定bin或库文件
- 6.2.1.1 项目结构
- 6.2.1.2 示例源码
- 6.2.1.3 运行查看
- 6.2.2 编译部分代码
- 总结
引言

CMake是开源、跨平台的构建工具,可以让我们通过编写简单的配置文件去生成本地的Makefile,这个配置文件是独立于运行平台和编译器的,这样就不用亲自去编写Makefile了,而且配置文件可以直接拿到其它平台上使用,无需修改,非常方便。
本文主要讲述在Linux下如何使用CMake来编译我们的程序。
一 环境搭建
我使用的是ubuntu18.04,安装cmake使用如下命令:
sudo apt install cmake
安装完成后,在终端下输入:
cmake -version
查看cmake版本
这样cmake就安装好了。
二 简单入门
首先让我们从最简单的代码入手,先来体验下cmake是如何操作的。
2.1 项目结构
2.2 示例源码
打开终端,输入:
touch main.c CMakeLists.txt
编写main.c,如下:
main.c
#include <stdio.h>
int main(void)
{
printf("Hello World\n");
return 0;
}
然后在main.c同级目录下编写CMakeLists.txt,内容如下:
CMakeLists.txt
cmake_minimum_required (VERSION 2.8)
project (demo)
add_executable(main main.c)
2.3 运行查看
在终端下切到main.c所在的目录下,然后输入以下命令运行cmake:
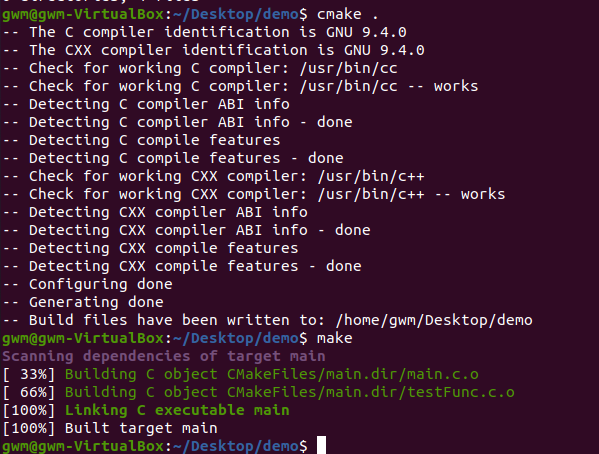
cmake .
输出结果如下:
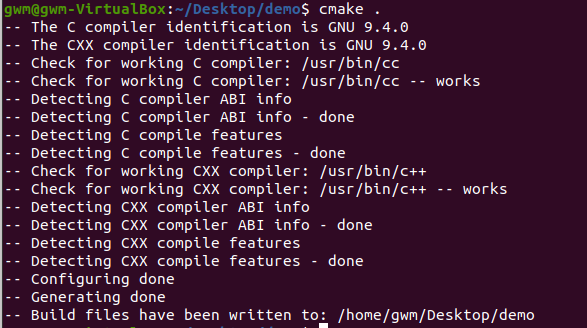
ps:此时,建议留意一下这个文件夹下多生成的文件都有哪些。

可以看到成功生成了Makefile,还有一些cmake运行时自动生成的文件。
然后在终端下输入make:
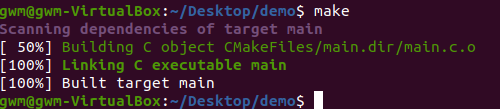
可以看到执行cmake生成的Makefile可以显示进度,并带颜色。再看下目录下的文件:

可以看到我们需要的可执行文件main也成功生成了!
然后运行main:

运行成功!
PS:如果想重新生成main,输入make clean就可以删除main这个文件。然后重新make就行。
需要注意的是:我希望你着重看一下这时候这个文件夹下都有哪些文件。
三 编译多个源文件
3.1 在同一个目录下有多个源文件
3.1.1 简单版本
接下来进入稍微复杂的例子:在同一个目录下有多个源文件。
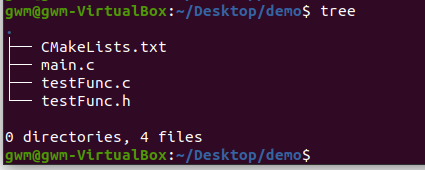
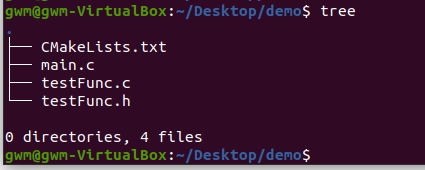
3.1.1.1 项目结构
3.1.1.2 示例代码
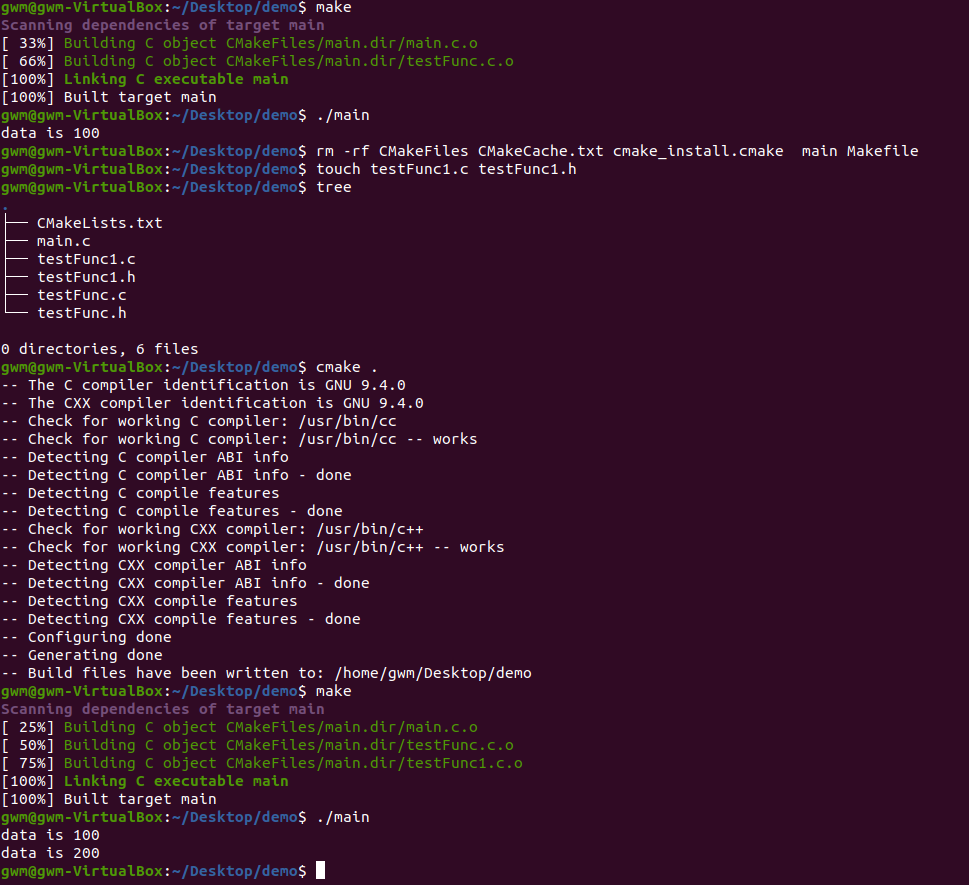
首先删除之前的文件:
rm -rf CMakeFiles CMakeCache.txt cmake_install.cmake Makefile main
在之前的目录下添加2个文件,testFunc.c和testFunc.h:
touch testFunc.c testFunc.h
添加完后整体文件结构如下:
testFunc.c
/*
** testFunc.c
*/
#include <stdio.h>
#include "testFunc.h"
void func(int data)
{
printf("data is %d\n", data);
}
testFunc.h
/*
** testFunc.h
*/
#ifndef _TEST_FUNC_H_
#define _TEST_FUNC_H_
void func(int data);
#endif
修改main.c,调用testFunc.h里声明的函数func():
main.c
#include <stdio.h>
#include "testFunc.h"
int main(void)
{
func(100);
return 0;
}
修改CMakeLists.txt,在add_executable的参数里把testFunc.c加进来:
CMakeLists.txt
cmake_minimum_required (VERSION 2.8)
project (demo)
add_executable(main main.c testFunc.c)
3.1.1.3 运行查看
cmake .
make
然后运行查看:

运行成功!
可以类推,如果在同一目录下有多个源文件,那么只要在add_executable里把所有源文件都添加进去就可以了。
但是如果有一百个源文件,再这样做就有点坑了,无法体现cmake的优越性。
因此cmake提供了一个命令可以把指定目录下所有的源文件存储在一个变量中,这个命令就是
aux_source_directory(dir var)
第一个参数dir是指定目录,第二个参数var是用于存放源文件列表的变量。
接下来写个进阶版的demo使用一下这个变量。
3.1.2 进阶版本
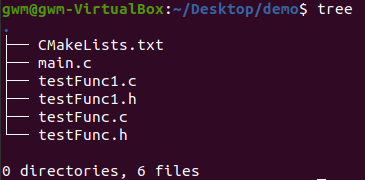
3.1.2.1 项目结构
3.1.2.2 示例源码
删除无关文件
rm -rf CMakeFiles CMakeCache.txt cmake_install.cmake main Makefile
创建文件:
touch testFunc1.c testFunc1.h
testFunc1.c
/*
** testFunc1.c
*/
#include <stdio.h>
#include "testFunc1.h"
void func1(int data)
{
printf("data is %d\n", data);
}
testFunc1.h
/*
** testFunc1.h
*/
#ifndef _TEST_FUNC1_H_
#define _TEST_FUNC1_H_
void func1(int data);
#endif
再修改main.c,调用testFunc1.h里声明的函数func1():
main.c
#include <stdio.h>
#include "testFunc.h"
#include "testFunc1.h"
int main(void)
{
func(100);
func1(200);
return 0;
}
修改CMakeLists.txt:
CMakeLists.txt
cmake_minimum_required (VERSION 2.8)
project (demo)
aux_source_directory(. SRC_LIST)
add_executable(main ${SRC_LIST})
使用aux_source_directory把当前目录下的源文件存列表存放到变量SRC_LIST里;
然后在add_executable里调用SRC_LIST(注意调用变量时的写法)。
3.1.2.3 运行查看
再次执行cmake和make,并运行main:
可以看到运行成功了。
aux_source_directory()也存在弊端,它会把指定目录下的所有源文件都加进来,可能会加入一些我们不需要的文件,此时我们可以使用set命令去新建变量来存放需要的源文件,如下:
cmake_minimum_required (VERSION 2.8)
project (demo)
set( SRC_LIST
./main.c
./testFunc1.c
./testFunc.c)
add_executable(main ${SRC_LIST})
3.2 在不同目录下有多个源文件
一般来说,当程序文件比较多时,我们会进行分类管理,把代码根据功能放在不同的目录下,这样方便查找。那么这种情况下如何编写CMakeLists.txt呢?
3.2.1 项目结构
我们把之前的源文件整理一下(新建2个目录test_func和test_func1):
rm -rf CMakeFiles CMakeCache.txt cmake_install.cmake main Makefile
整理好后整体文件结构如下:
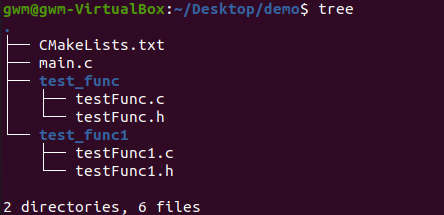
把之前的testFunc.c和testFunc.h放到test_func目录下,testFunc1.c和testFunc1.h则放到test_func1目录下。
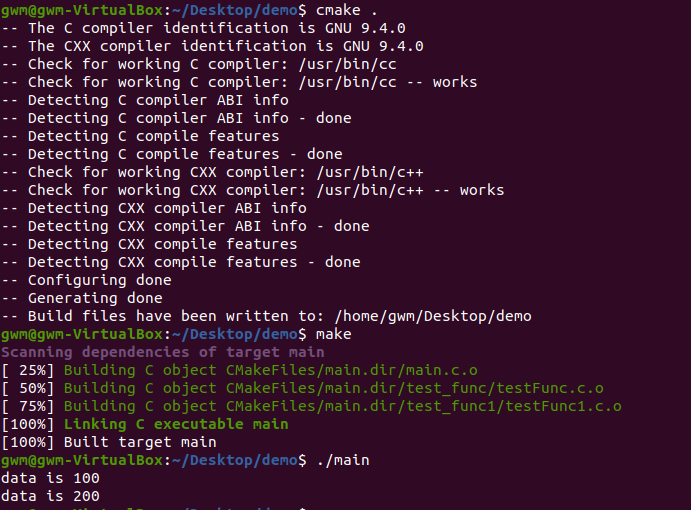
3.2.2 示例源码
其中,CMakeLists.txt和main.c在同一目录下,内容修改成如下所示:
cmake_minimum_required (VERSION 2.8)
project (demo)
include_directories (test_func test_func1)
aux_source_directory (test_func SRC_LIST)
aux_source_directory (test_func1 SRC_LIST1)
add_executable (main main.c ${SRC_LIST} ${SRC_LIST1})
这里出现了一个新的命令:include_directories。
该命令是用来向工程添加多个指定头文件的搜索路径,路径之间用空格分隔。
因为main.c里include了testFunc.h和testFunc1.h,如果没有这个命令来指定头文件所在位置,就会无法编译。当然,也可以在main.c里使用include来指定路径,如下
#include "test_func/testFunc.h"
#include "test_func1/testFunc1.h"
只是这种写法不好看。
另外,我们使用了2次aux_source_directory,因为源文件分布在2个目录下,所以添加2次。
3.2.2 运行查看
四 项目级的组织结构
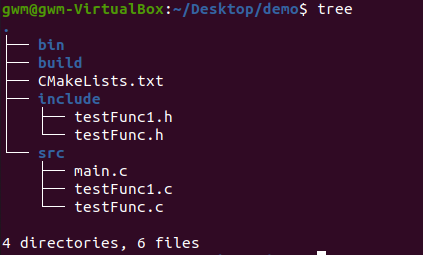
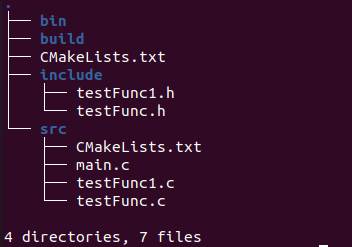
正规一点来说,一般会把源文件放到src目录下,把头文件放入到include文件下,生成的对象文件放入到build目录下,最终输出的可执行程序文件会放到bin目录下,这样整个结构更加清晰。
4.1 项目结构
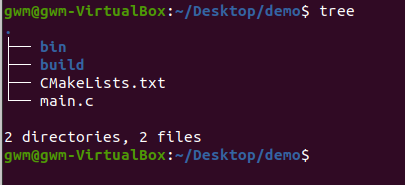
让我们把前面的文件再次重新组织下:
4.2 示例源码
修改CMakeLists.txt:
CMakeLists.txt
cmake_minimum_required (VERSION 2.8)
project (demo)
add_subdirectory (src)
add_subdirectory:这个语句的作用是增加编译子目录。其基本语法格式是:
add_subdirectory(source_dir [binary_dir] [EXCLUDE_FROM_ALL])
一共有三个参数,后两个是可选参数.
指定一个包含CMakeLists.txt和代码文件所在的目录,该目录可以是绝对路径,也可以是相对路径,对于后者相对路径的起点是CMAKE_CURRENT_SOURCE_DIR。此外,如果子目录再次包含的CMakeLists.txt,则将继续处理里层的CMakeLists.txt,而不是继续处理当前源代码。
这个目录是可选的,如果指定,cmake命令执行后的输出文件将会存放在此处,若没有指定,默认情况等于source_dir没有进行相对路径计算前的路径,也就是CMAKE_BINARY_DIR。
这个标志是可选的,如果传递了该参数表示新增加的子目录将会排除在ALL目录之外(可能是make系统中的make all?),表示这个目录将从IDE的工程中排除。用户必须显式在子文件这个编译目标(手动cmake之类的)。指定了这个文件夹,表示这个文件夹是独立于源工程的,这些函数是有用但是不是必要的,比如说我们一系列的例子。
add_subdirectory 这个命令用于添加源文件子目录,同时还可以指定中间二进制和目标二进制的生成路径。EXCLUDE_FROM_ALL将会将这个目录从编译中排除,如工程的例子需要等待其他编译完成后再进行单独的编译。通常子目录应该包含自己的project()命令,这样以来整个编译命令将会产生各自的目标文件。如果把CMakeLists.txt与VS IDE比较,总的CMakeLists.txt就相当于解决方案,子CMakeLists.txt就相当于在解决方案下的工程文件。还有一个需要注意的是,如果编译父CMakeLists时依赖了子CMakeLists.txt中的源文件,那么该标志将会被覆盖(也就是也会处理),以满足编译任务。
这里指定src目录下存放了源文件,当执行cmake时,就会进入src目录下去找src目录下的CMakeLists.txt,所以在src目录下也建立一个CMakeLists.txt,内容如下:
src/CMakeLists.txt
aux_source_directory (. SRC_LIST)
include_directories (../include)
add_executable (main ${SRC_LIST})
set (EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
这里的set其实是和前面的一样,只是EXECUTABLE_OUTPUT_PATH是个系统自带的预定义变量,其意义如下:
- EXECUTABLE_OUTPUT_PATH :目标二进制可执行文件的存放位置
- PROJECT_SOURCE_DIR:工程的根目录
所以,这里set的意思是把存放elf文件的位置设置为工程根目录下的bin目录。(cmake有很多预定义变量,详细的可以网上搜索一下)
添加好以上这2个CMakeLists.txt后,整体文件结构如下:
4.3 运行查看
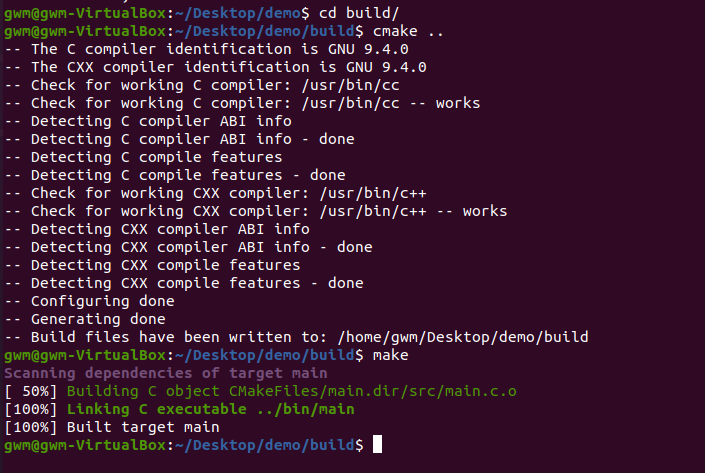
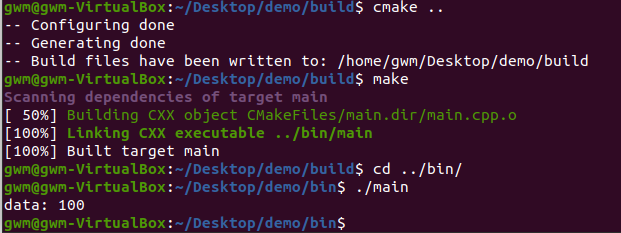
下面来运行cmake,不过这次先让我们切到build目录下:
cd build
cmake ..
make
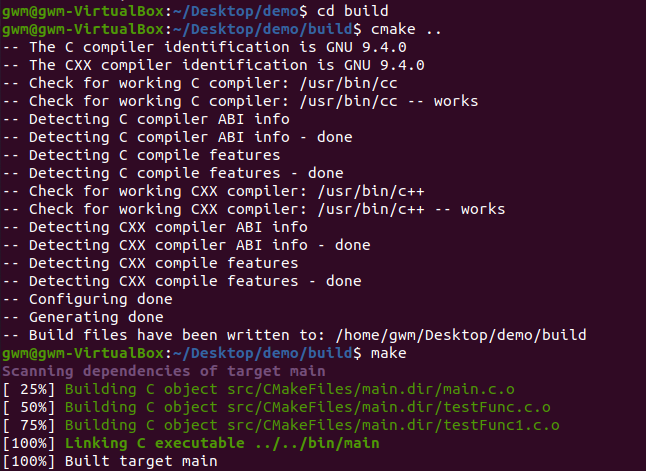
这样Makefile会在build目录下生成,二进制程序会在bin目录下生成,然后运行可执行程序:
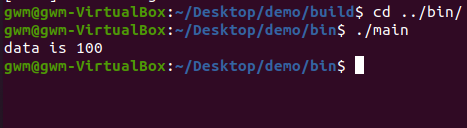
cd ../bin
./main

这里解释一下为什么在build目录下运行cmake?
还记得在第一个例子里我让你着重看一下cmake和make之后会生成什么文件吗?这个过程中会生成很多文件,但是可惜的是跟我们的运行并没有什么关系,因此,如果能把编译隔离在某个文件夹,这样cmake的时候所有的中间文件都将在这个目录下生成,删除的时候也很好删除,非常方便。如果不这样做,cmake运行时生成的附带文件就会跟源码文件混在一起,这样会对程序的目录结构造成污染。
另外一种写法:
前面的工程使用了2个CMakeLists.txt,最外层的CMakeLists.txt用于掌控全局,使用add_subdirectory来控制其它目录下的CMakeLists.txt的运行。
上面的例子也可以只使用一个CMakeLists.txt,把最外层的CMakeLists.txt内容改成如下
CMakeLists.txt
cmake_minimum_required (VERSION 2.8)
project (demo)
set (EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
aux_source_directory (src SRC_LIST)
include_directories (include)
add_executable (main ${SRC_LIST})
同时,还要把src目录下的CMakeLists.txt删除。
然后正常编译运行就可以。
五 动态库和静态库的编译控制
有时只需要编译出动态库和静态库,然后等着让其它程序去使用。让我们看下这种情况该如何使用cmake。
关于什么是静态库和动态库以及如何使用它们,请参见我的另一篇博客【C++】静态库与动态库的生成与使用介绍
5.1 生成库文件
5.1.1 项目结构
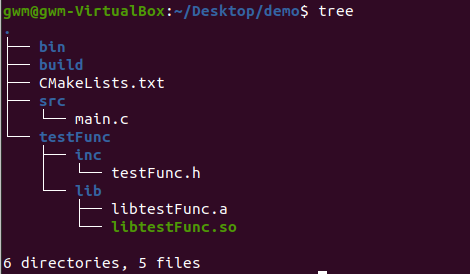
首先按照如下重新组织文件,只留下testFunc.h和TestFunc.c
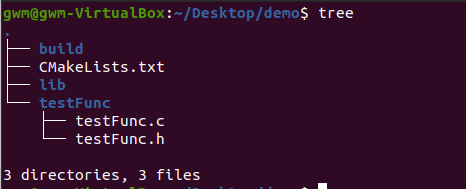
我们会在build目录下运行cmake,并把生成的库文件存放到lib目录下。
5.1.2 示例源码
CMakeLists.txt
cmake_minimum_required (VERSION 3.5)
project (demo)
set (SRC_LIST ${PROJECT_SOURCE_DIR}/testFunc/testFunc.c)
add_library (testFunc_shared SHARED ${SRC_LIST})
add_library (testFunc_static STATIC ${SRC_LIST})
set_target_properties (testFunc_shared PROPERTIES OUTPUT_NAME "testFunc")
set_target_properties (testFunc_static PROPERTIES OUTPUT_NAME "testFunc")
set (LIBRARY_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/lib)
这里又出现了新的命令和预定义变量:
- add_library: 生成动态库或静态库(第1个参数指定库的名字;第2个参数决定是动态还是静态,如果没有就默认静态;第3个参数指定生成库的源文件)
- set_target_properties: 设置最终生成的库的名称,还有其它功能,如设置库的版本号等
- LIBRARY_OUTPUT_PATH: 库文件的默认输出路径,这里设置为工程目录下的lib目录
PS:前面使用set_target_properties重新定义了库的输出名称,如果不使用set_target_properties也可以,那么库的名称就是add_library里定义的名称,只是连续2次使用add_library指定库名称时(第一个参数),这个名称不能相同,而set_target_properties可以把名称设置为相同,只是最终生成的库文件后缀不同(一个是.so,一个是.a),这样相对来说会好看点。
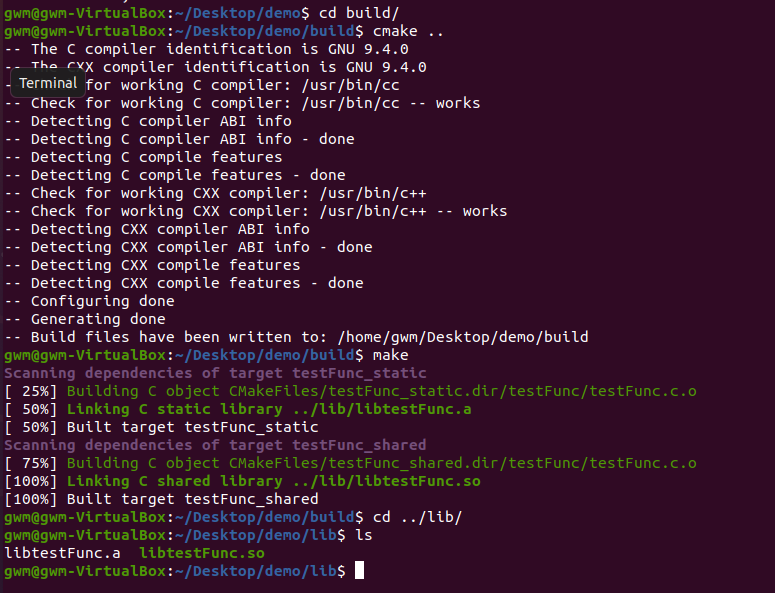
5.1.3 运行查看
cd build/
cmake ..
make
cd ../lib/
ls
5.2 链接库文件
既然我们已经生成了库,那么就进行链接测试下。
5.2.1 项目结构
重新建一个工程目录,然后把上节生成的库拷贝过来,然后在在工程目录下新建src目录和bin目录,在src目录下添加一个main.c,整体结构如下:
5.2.2 示例源码
main.c
#include <stdio.h>
#include "testFunc.h"
int main(void)
{
func(100);
return 0;
}
CMakeLists.txt
cmake_minimum_required (VERSION 3.5)
project (demo)
set (EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
set (SRC_LIST ${PROJECT_SOURCE_DIR}/src/main.c)
# find testFunc.h
include_directories (${PROJECT_SOURCE_DIR}/testFunc/inc)
find_library(TESTFUNC_LIB testFunc HINTS ${PROJECT_SOURCE_DIR}/testFunc/lib)
add_executable (main ${SRC_LIST})
target_link_libraries (main ${TESTFUNC_LIB})
这里出现2个新的命令,
- find_library: 在指定目录下查找指定库,并把库的绝对路径存放到变量里,其第一个参数是变量名称,第二个参数是库名称,第三个参数是HINTS,第4个参数是路径,其它用法可以参考cmake文档
- target_link_libraries: 把目标文件与库文件进行链接
使用find_library的好处是在执行cmake …时就会去查找库是否存在,这样可以提前发现错误,不用等到链接时。
5.2.3 运行查看
cd到build目录下,然后运行cmake … && make,最后进入到bin目录下查看,发现main已经生成,运行之:
cd build/
cmake ..
make
cd ../bin/
./main
ps:在lib目录下有testFunc的静态库和动态库,find_library(TESTFUNC_LIB testFunc
…默认是查找动态库,如果想直接指定使用动态库还是静态库,可以写成find_library(TESTFUNC_LIB
libtestFunc.so …或者find_library(TESTFUNC_LIB libtestFunc.a …
ps: 查看elf文件使用了哪些库,可以使用readelf -d ./xx来查看 例:readelf -d ./main
六 条件编译
有时编译程序时想添加一些编译选项,如-Wall,-std=c++11等,就可以使用add_compile_options来进行操作。
这里以一个简单程序来做演示。
6.1 简单程序
6.1.1 项目结构
6.1.2 示例代码
main.cpp
#include <iostream>
int main(void)
{
auto data = 100;
std::cout << "data: " << data << "\n";
return 0;
}
CMakeLists.txt
cmake_minimum_required (VERSION 2.8)
project (demo)
set (EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
add_compile_options(-std=c++11 -Wall)
add_executable(main main.cpp)
6.1.3 运行查看
然后cd到build目录下,执行cmake … && make命令,就可以在bin目录下得到main的可执行文件
6.2 添加编译选项
有时希望在编译代码时只编译一些指定的源码,可以使用cmake的option命令,主要遇到的情况分为2种:
- 本来要生成多个bin或库文件,现在只想生成部分指定的bin或库文件
- 对于同一个bin文件,只想编译其中部分代码(使用宏来控制)
6.2.1 生成部分指定bin或库文件
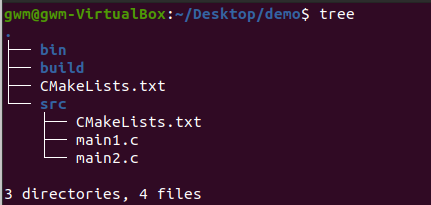
6.2.1.1 项目结构
假设我们现在的工程会生成2个bin文件,main1和main2,项目结构如下:
6.2.1.2 示例源码
CMakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(demo)
option(MYDEBUG "enable debug compilation" OFF)
set (EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
add_subdirectory(src)
这里使用了option命令,其第一个参数是这个option的名字,第二个参数是字符串,用来描述这个option是来干嘛的,第三个是option的值,ON或OFF,也可以不写,不写就是默认OFF。
然后编写src目录下的CMakeLists.txt,如下:
src/CMakeLists.txt
cmake_minimum_required (VERSION 3.5)
add_executable(main1 main1.c)
if (MYDEBUG)
add_executable(main2 main2.c)
else()
message(STATUS "Currently is not in debug mode")
endif()
注意,这里使用了if-else来根据option来决定是否编译main2.c,其中main1.c和main2.c的内容如下:
main1.c
// main1.c
#include <stdio.h>
int main(void)
{
printf("hello, this main1\n");
return 0;
}
main1.c
// main2.c
#include <stdio.h>
int main(void)
{
printf("hello, this main2\n");
return 0;
}
6.2.1.3 运行查看
然后cd到build目录下输入cmake … && make就可以只编译出main1,如果想编译出main2,就把MYDEBUG设置为ON,再次输入cmake … && make重新编译。
每次想改变MYDEBUG时都需要去修改CMakeLists.txt,有点麻烦,其实可以通过cmake的命令行去操作,例如我们想把MYDEBUG设置为OFF,先cd到build目录,然后输入cmake … -DMYDEBUG=ON,这样就可以编译出main1和main2 (在bin目录下)
6.2.2 编译部分代码
假设我们有个main.c,其内容如下:
main.c
#include <stdio.h>
int main(void)
{
#ifdef WWW1
printf("hello world1\n");
#endif
#ifdef WWW2
printf("hello world2\n");
#endif
return 0;
}
可以通过定义宏来控制打印的信息,我们CMakeLists.txt内容如下:
cmake_minimum_required(VERSION 3.5)
project(demo)
set (EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
option(WWW1 "print one message" OFF)
option(WWW2 "print another message" OFF)
if (WWW1)
add_definitions(-DWWW1)
endif()
if (WWW2)
add_definitions(-DWWW2)
endif()
add_executable(main main.c)
这里把option的名字保持和main.c里的宏名称一致,这样更加直观,也可以选择不同的名字。通过与add_definitions()的配合,就可以控制单个bin文件的打印输出了。
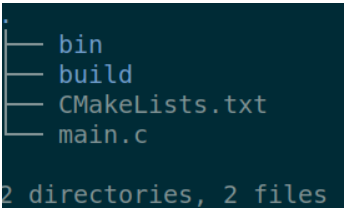
整体工程结构如下:
cd到build目录下执行cmake … && make,然后到bin目录下执行./main,可以看到打印为空,
接着分别按照下面指令去执行,然后查看打印效果,
- cmake … -DWWW1=ON -DWWW2=OFF && make
- cmake … -DWWW1=OFF -DWWW2=ON && make
- cmake … -DWWW1=ON -DWWW2=ON && make
这里有个小坑要注意下:假设有2个options叫A和B,先调用cmake设置了A,下次再调用cmake去设置B,如果没有删除上次执行cmake时产生的缓存文件,那么这次虽然没设置A,也会默认使用A上次的option值。
所以如果option有变化,要么删除上次执行cmake时产生的缓存文件,要么把所有的option都显式的指定其值。
总结
以上是自己学习CMake的一点学习记录,通过简单的例子让大家入门CMake,学习的同时也阅读了很多网友的博客。CMake的知识点还有很多,具体详情可以在网上搜索。总之,CMake可以让我们不用去编写复杂的Makefile,并且跨平台,是个非常强大并值得一学的工具。
如果有写的不对的地方,希望能留言指正,谢谢阅读。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)