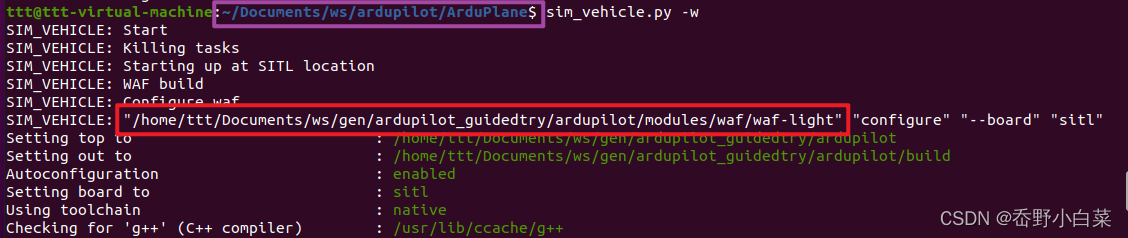
分别安装了4.2和4.3两个版本的ardupilot工作环境,出现运行4.3版本sim_vehicle.py时路径链接到4.2版本工作路径
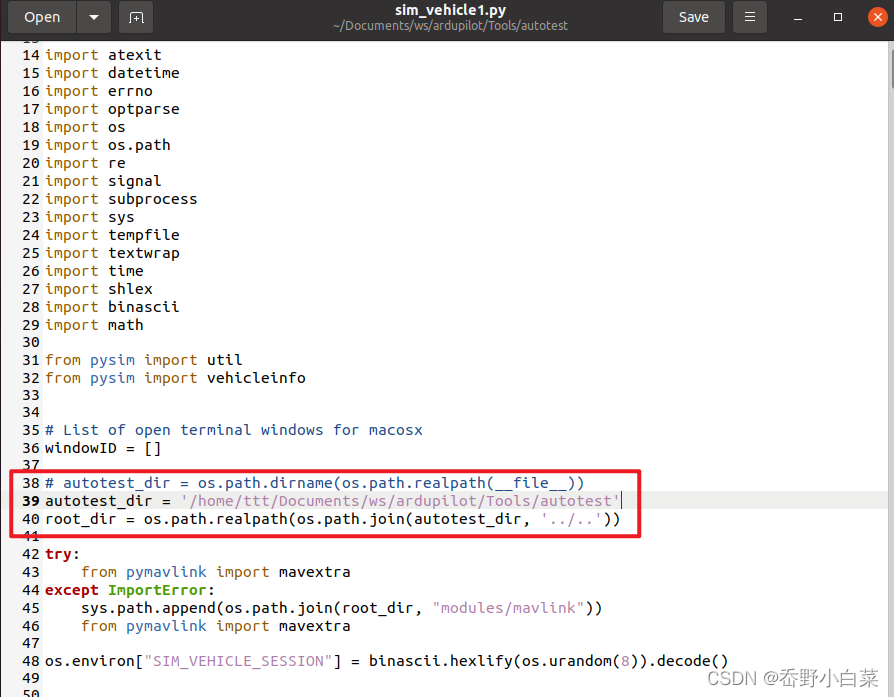
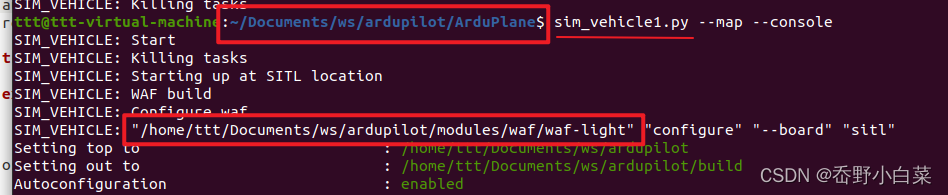
为防止文件识别错误,更改sim_vehicle.py文件名为sim_vehicle1.py 更改38行路径为当前文件的绝对路径 再次运行,报错解决