多旋翼飞行器学习笔记
二、机架设计
2.1布局设计
1·机身基本布局
·交叉型:

目前常用的是X字型布局,因为:
(1)机动性更强;
(2)前视相机的视场角不容易被遮挡。
·环形:

·与传统交叉型机架相比,其刚性更大;
·可较大程度上避免飞行中机架所产生的振动,增加了机架结构强度;
·但是,增加了机架的重量、转动惯量,灵活性降低。
2·旋翼安装
旋翼分为单桨和共轴双桨

共轴双桨优点:
(1)不增加多旋翼整体尺寸;
(2)减少螺旋桨对照相机视场的遮挡;
局限性:
会降低单个螺旋桨的效率。大概共轴双桨只相当于1.6个螺旋桨。

桨盘角度
1、螺旋桨桨盘水平装配

优点:简单
局限性:但是这种安装需要云台来使相机保持水平
2、螺旋桨桨盘倾斜装配

优点:在水平方向多旋翼的抗风能力会增强;无需云台
局限性:若要实现水平平移,至少六个桨。
旋翼朝向:
多旋翼的电机主要有两种安装方式——电机朝下安装和电机朝上安装(主流安装方式)
朝上安装的电机产生向上的拉力;着陆阶段不易碰到障碍物而损坏桨;不易遮挡相机。
朝下安装的电机产生向下的推力;下洗气流完整,防雨,不易影响气压计的高度测量;不脱桨。

3·旋翼和机体半径
对于n旋翼飞行器,机架半径R与旋翼最大半径r(max)存在如下关系(Θ表示轴间夹角)


实验表明,当螺旋桨与桨之间的距离,从一个桨半径到0.1个桨半径变化时,气流对飞行器的整体性能影响很小。因此,为了使飞行器尽量紧凑,比如可令旋翼最大半径r(max)等于1.05个螺旋桨半径到1.2个螺旋桨半径。

4·尺寸和机动性的关系
减小多旋翼机体尺寸对多旋翼惯性、有效负载具有很大影响,并最终影响最大可达角加速度和线加速度。
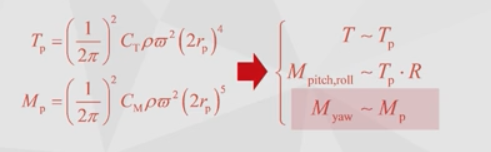
作用于多旋翼上的合力,相似为(同数量级于)单个螺旋桨的拉力。
作用在俯仰和滚转通道上的力矩相似为单个旋翼的拉力诚意它的特征长度。
偏航力矩相似为螺旋桨的扭矩。
通过以上公式进一步得到如下公式:

作用在多旋翼上的拉力相似为螺旋桨转速的平方乘以特征长度的四次方。
作用在多旋翼上的转矩(力矩),它相似为螺旋桨转速的平方乘以特征长度的五次方。
由以下两公式:

得到多旋翼的线加速度及角加速度:

两种限制:
1、马赫数尺度限制:螺旋桨的叶间速度为常数,如小于音速。通过这个限制可以得到:

多旋翼的线加速度相似为特征常数的导数,角加速度相似为特征长度平方的倒数。
2、弗劳德数尺度限制:

多旋翼德线加速度相似为一个常数,而角加速度相似为特征长度的倒数。
由以上两种限制可知:尺寸越大的多旋翼,机动性能越差。
5·重心位置
重心应设计到多旋翼的中心轴线上
重心在下:目前大多数多旋翼采用此种方式
重心在上:用于需要从下往上或斜上方拍摄用途的多旋翼

多旋翼前飞情形:
(a)在图中,诱导的来流会产生平行于桨盘平面的阻力如果多旋翼重心在桨盘平面下方,那么阻力形成的力矩会促使多旋翼俯仰角转向0度方向。
(b)若多旋翼重心在桨盘平面上,那么阻力形成的力矩会促使多旋翼俯仰角朝发散方向发展,直至翻转。因此,当多旋翼前飞时,重心在桨盘平面的下方会使前飞运动稳定。


多旋翼风干扰情形下的稳定性:
(c)当阵风吹来,诱导的来流会产生平行于桨盘平面的阻力如果多旋翼重心在下,那么阻力形成的力矩会促使多旋翼俯仰角朝发散的方向发展,直至翻转。
(d)若多旋翼重心在上,那么阻力形成的力矩会促使多旋翼俯仰朝O度方向发展。因此,当多旋翼受到外界风干扰时,重心在桨盘平面的上方可以抑制扰动。


无论重心在桨盘平面的上方或下方都不能使多旋翼稳定。需要通过反馈控制将多旋翼平衡。然而,如果重心在桨盘平面很靠上的位置,会使多旋翼某个运动模态很不稳定。因此,实际中建议将重心配置在飞行器桨盘平面中心,或者根据需求可以稍微靠下。这样控制器控制起来更容易些。
6·自驾仪安装位置
理想位置应在多旋翼的中心。若自驾仪离飞行器中心较远,由于存在离心加速度和切向加速度,将会引起加速度计的测量误差,即“杆臂效应”。
1、标准安装位置

自驾仪白色箭头为正方向,应与机头方向一直,安装时,自驾仪应安装在距水平和竖直中心较近的地方。通常与中心在几厘米以内,并且与电机水平。
2、代用安装位置
Pixhawk/APM2自驾仪可在超过30度角的方位安装在机架上,可通过相应的软件设置重新得到自驾仪安装在机体上的标准方位。
7·气动布局
对外形进行设计主要是为了降低飞行时的阻力。按其产生的原因不同可分为:
(1)摩擦阻力
(2)压差阻力:压差阻力受迎风面积和形状影响,迎风面积越大,压差阻力越大。下图为形状对压差阻力大小的影响。平板最大,球体次之,流线体最小。流线体阻力可以是平板的1/20。

(3)诱导阻力
(4)干扰阻力:要减少该阻力,需要妥善考虑和安排各部件之间的相对位置关系,部件连接处尽量圆滑过渡,减少漩涡产生。
设计建议:
(1)需要考虑多旋翼前飞时的倾角,减少最大迎风面积。
(2)设计流线型机身。
(3)考虑和安排各部件之间的相对位置关系,部件连接处尽量圆滑过渡,飞机表面也要尽量光滑。
(4)通过CFD仿真计算阻力系数,不断仿真。

2.2结构设计
1·机体设计基本原则
1、刚度、强度满足负载要求,机体不会发生晃动、弯曲。
·极限负载:指负载乘以一个规定的安全系数。
2、满足其他设计原则下,重量越轻越好。
3、合适的长宽高比,各轴间距、结构布局适宜。
4、飞行过程中,满足其他设计原则下,保证机体振动越小越好。
5、美观耐用。
2·减震设计
·减震意义:
1)飞控板上的加速度传感器对振动十分敏感,具体表现为:
·加速度信号直接关系到姿态角和姿态角速率的估计。
·飞控程序融合了加速度计和气压计、GPS数据来估计飞行器的位置。
2)减振另外一个重要的作用是提高成像的质量。
·震动的主要来源:
机体振动主要来源于机架变形、电机和螺旋桨不对称。
1、机架:
(1)机臂的刚度越大越好;
(2)一般的碳纤维多旋翼机架具有足够的抗扭特性和抗弯特性;
(3)铝制机架刚性更好,但更重;
(4)要保证电机与机臂的安装连接,以及机臂与控制云台的安装连接是安全可靠的,并具有一定的减震缓冲效果。
(5)在飞行时,在拉力方向上保持一定的刚度,避免震动。
2、电机:
(1)电机能够平滑稳定运行;
(2)桨夹需要和电机轴承、螺旋桨中心共轴,避免电机转动时产生偏心力;电机平衡。
(3)电机平衡。
3、螺旋桨:(震动最主要来源)
(1)螺旋桨平衡调节器;
(2)螺旋桨应匹配机架型号和机体重量,并在顺逆时针旋转时具有相同的韧性;
(3)碳纤维螺旋桨合适,但它刚度较大,旋转时存在安全隐患;
(4)低速大螺旋桨相比于高速小桨效率更高,但是振动幅度较大。
·震动强度约束:
1、一般在多旋翼横向振动强度低于0.3g,在纵向振动要求低于0.5g。
2、在实际工程中要求所有轴震动强度在±0.1g之内。
若以上问题都考虑了,那么只需要再考虑其他减震手段了。
·自驾仪与机架的隔振:
1、双面泡沫胶带和尼龙扣。
2、Dubro泡沫、凝胶垫、O形环悬挂安装和耳塞式安装等。

3、飞控减震器(下图减震器由两块玻纤支架、四个减震球和两块泡棉胶垫组成)

除了以上的减震手段外,还可以在电路上,通过电路滤除高频干扰。
大多数多旋翼飞控板,在MEMS加速计前端都配有一个抗锯齿波模拟的滤波器,也称抗混叠滤波器,在采样之前要经过电路滤波,以减少噪声信号对采样信号的污染。
3·减噪设计
·螺旋桨噪声的主要危害:
1、多旋翼机身将处于螺旋桨所直接辐射的声场内,各灵敏传感器可能会受到噪声的影响而失真。
2、噪声影响周围环境,产生噪声污染。
3、诱发的机体结构振动与声疲劳,有可能严重影响飞机的安全性。
4、小型多旋翼出于隐秘侦查的需求,需要保持飞行时的足够安静。
·螺旋桨发生原理:
1、旋转噪声(包括厚度噪声和负载噪声)
·厚度噪声:具有一定厚度的桨叶,周期性的扫过周围的介质,并导致空气微团的周期性非定常运动,产生厚度噪声。
·负载噪声:拉力噪声与阻力噪声的组合,是由于桨叶页面的压力场变化而引起的。
2、宽带噪声:螺旋桨的宽带噪声是由桨叶与湍流之间相互作用产生的桨叶负载随机变化引起。
·减噪措施:
1、对于多旋翼来说增大桨距或桨叶直径会减弱桨叶叶尖失速产生的噪声。
2、通过减小桨叶的总体积,我们就可以减小桨叶剖面的相对厚度和弦长,从而大幅度降低厚度噪声。
3、对于给定的拉力设计要求,增加螺旋桨叶数可以减小叶片尺寸和转速,从而降低翼尖相对马赫数,减弱叶片的噪声辐射。
4、通过设计改进桨叶形状,将噪声功率向内径方向移动来实现降噪。
5、机载的声传感器可以探测到某个螺旋桨所产生的噪声,通过闭环反馈,系统可以利用另一个螺旋桨进行相应的抗噪,从而抵消所产生的噪声。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)