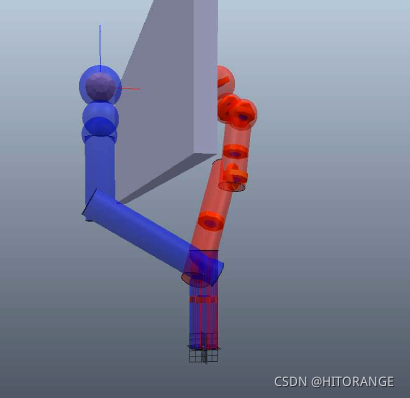
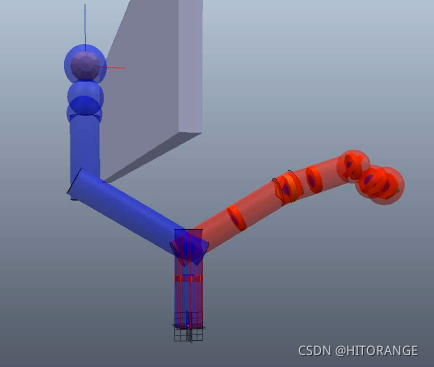
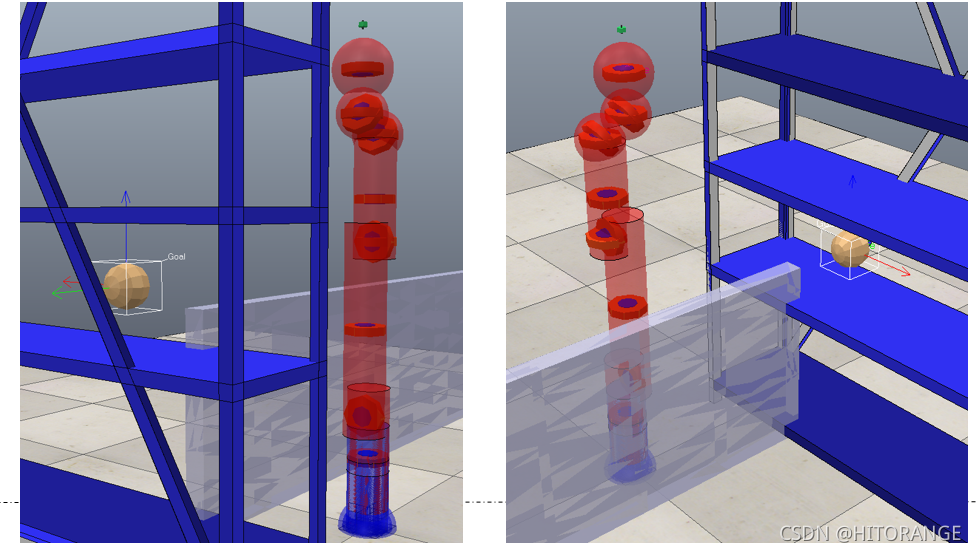
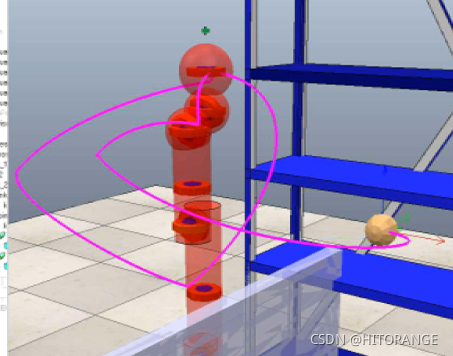
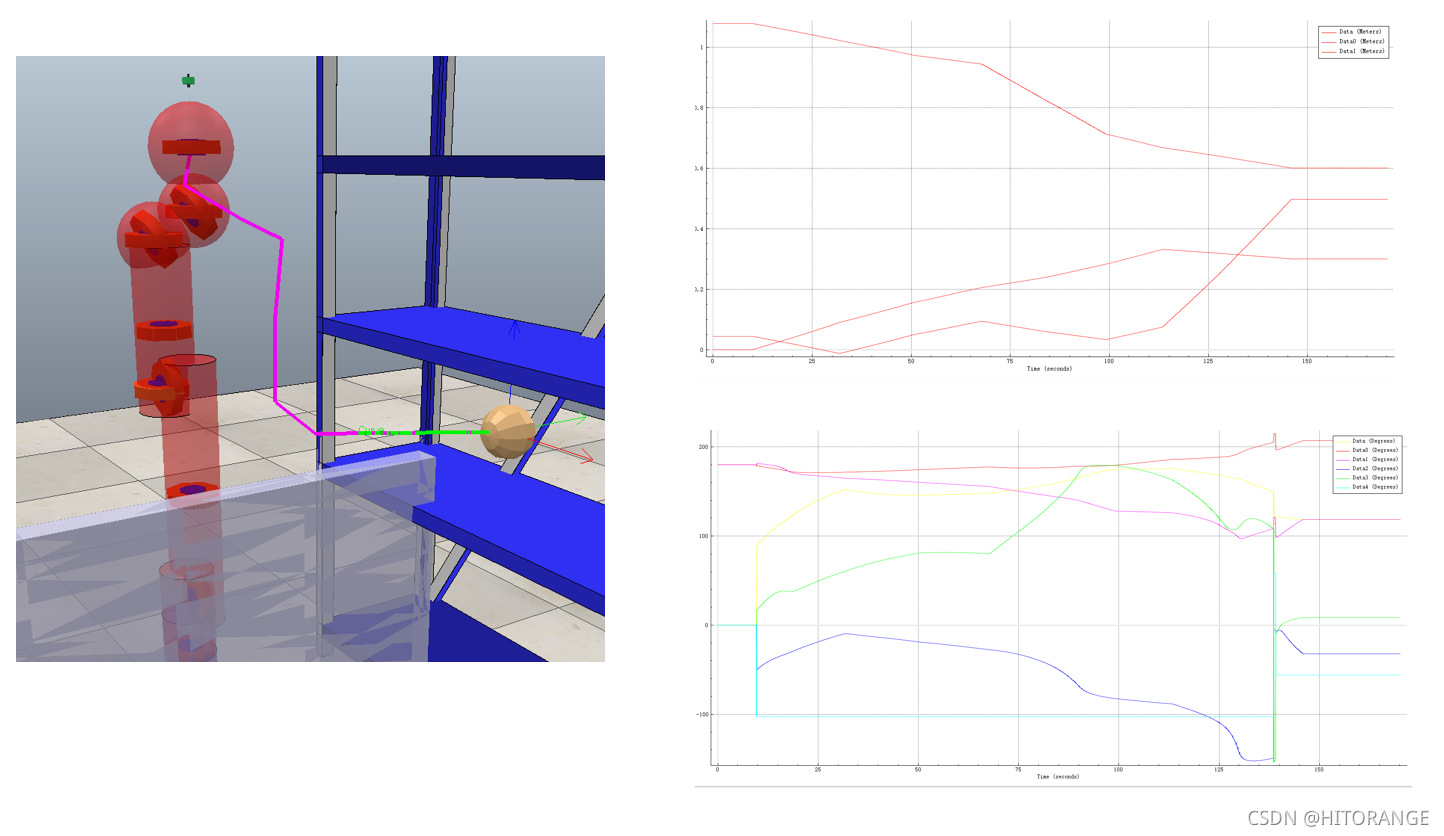
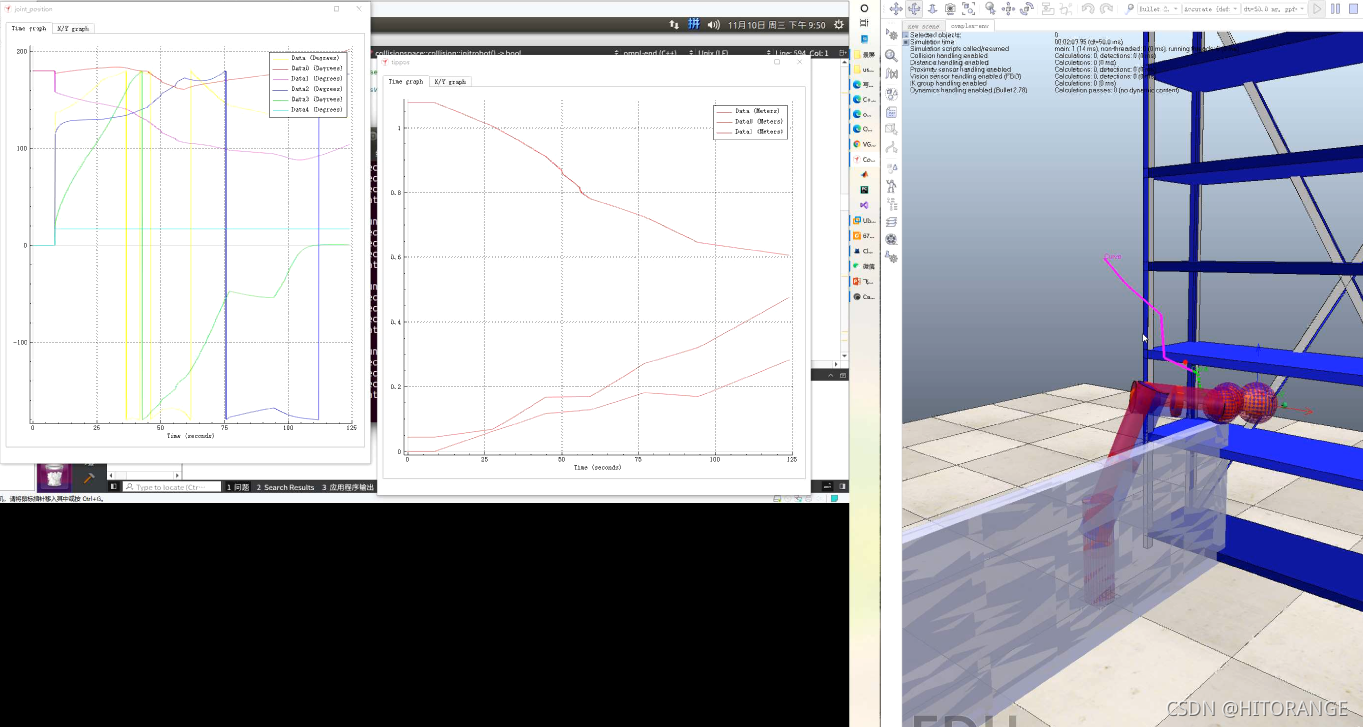
关节空间路径规划简单障碍物情况: 之后搭建复杂障碍物场景:
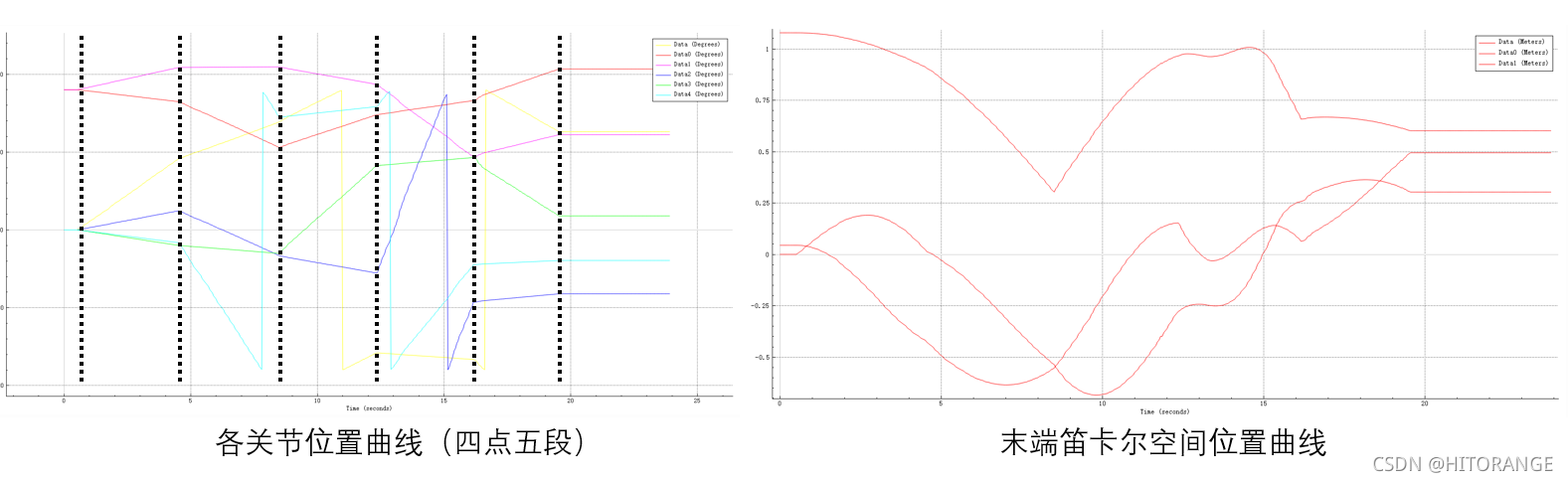
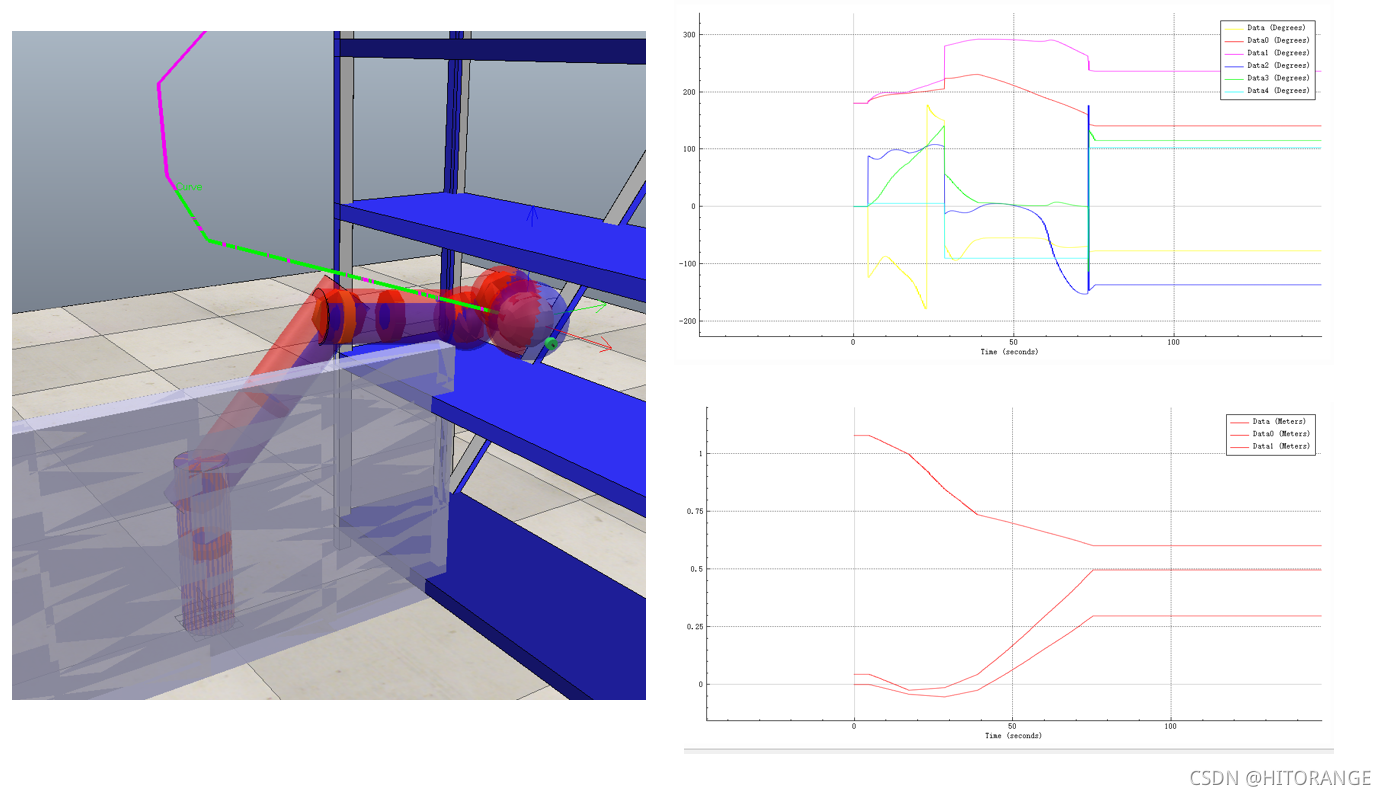
测试发现路径规划的两个步骤: 采用了关节空间进行路径规划的方案,原因主要是在关节空间也就是构型空间中,每个点对应的机械臂整体构型都是确定的,通过正运动学就可以完成连杆位姿的计算和碰撞检测,规划出的路径对于关节的电机来说较容易实现运动,可以找到一条能量最低,耗时最短的路径
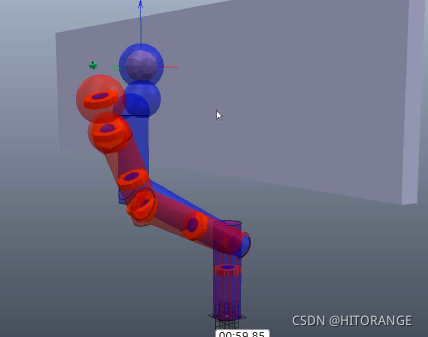
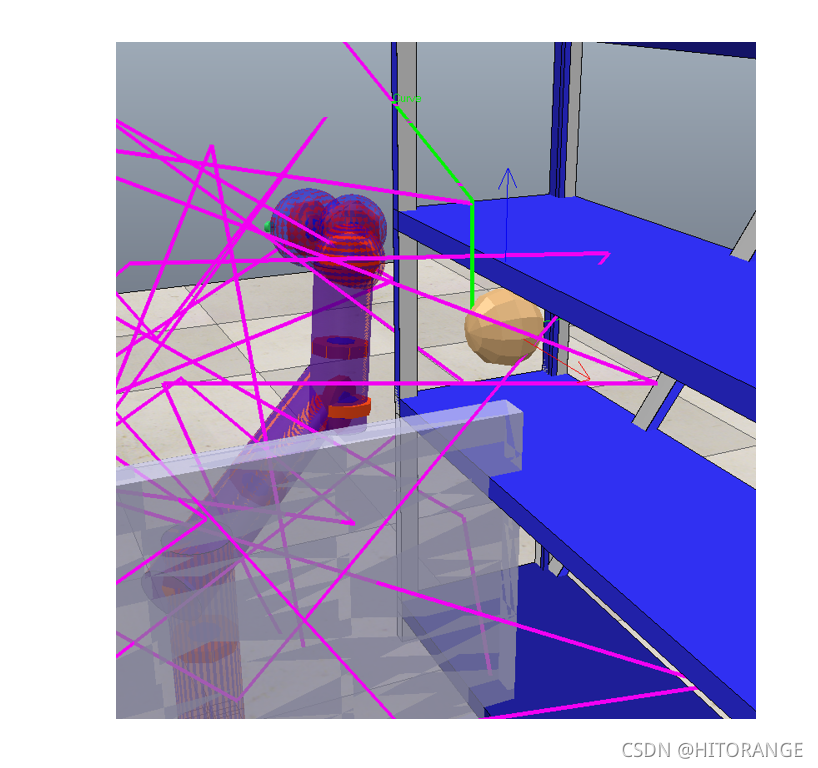
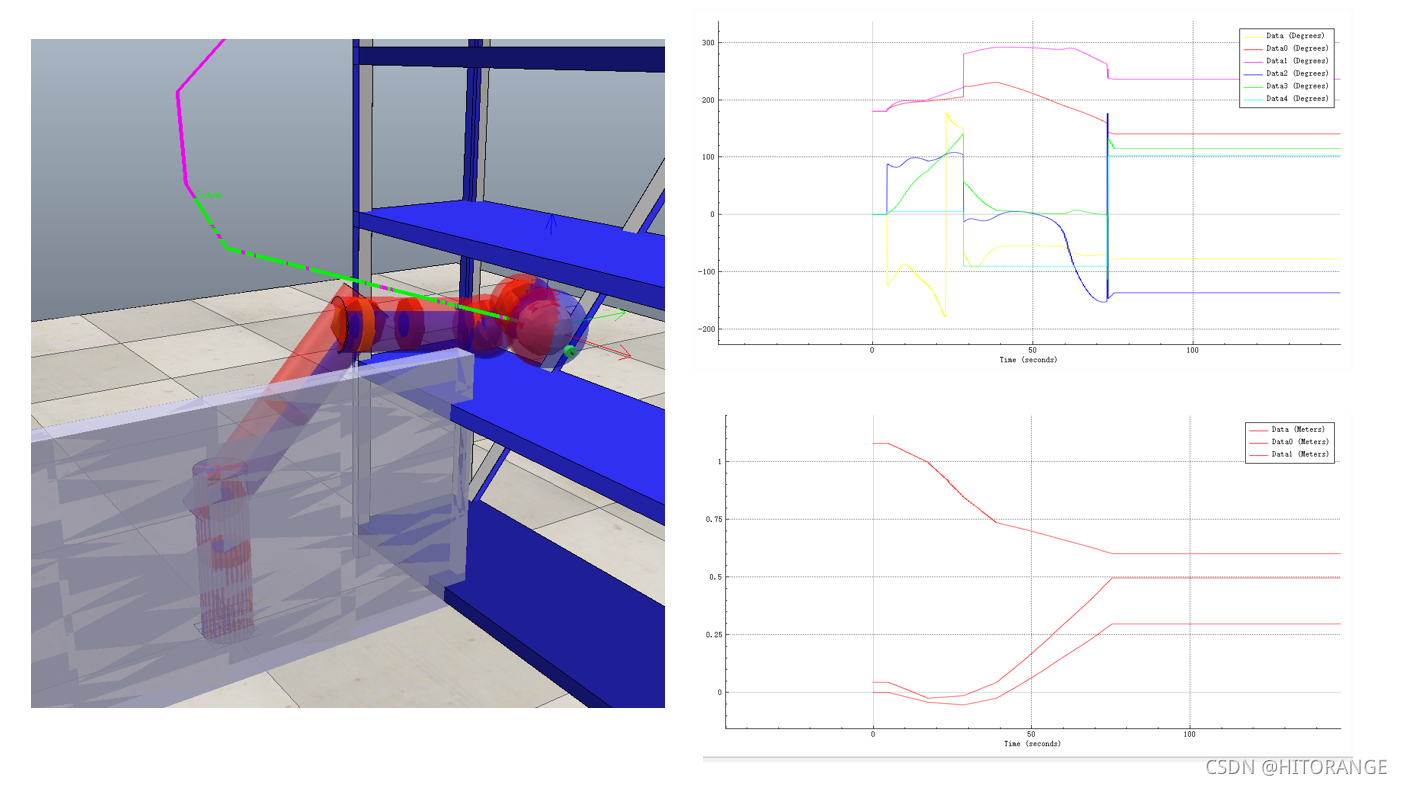
但是对于末端的位姿来说,波动较大,不利于实现对机械臂末端夹持工具的一些运动限制,因此尝试了末端空间的路径规划。 末端笛卡尔空间路径规划的步骤:和可选的约束
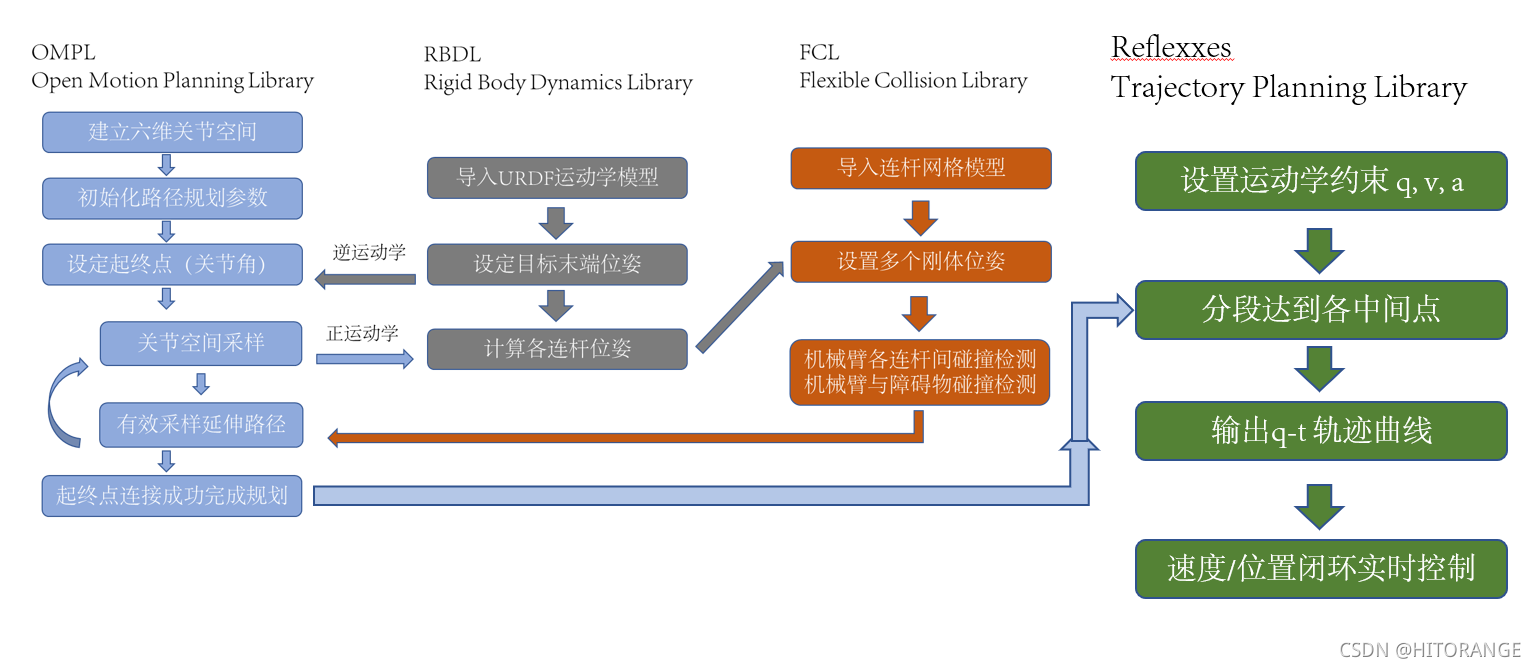
预计加入轨迹规划的流程图: 预期目标:平滑控制机械臂运动完成无碰撞的末端位置控制运动过程。