无人机动力系统
测试实验实训教学课程
实验课程4:动力系统基本参数测量与验证
课程内容:
1. 动力系统性能参数及性能特性曲线
2. 动力系统性能参数及性能特性曲线测试实验
实验器材:
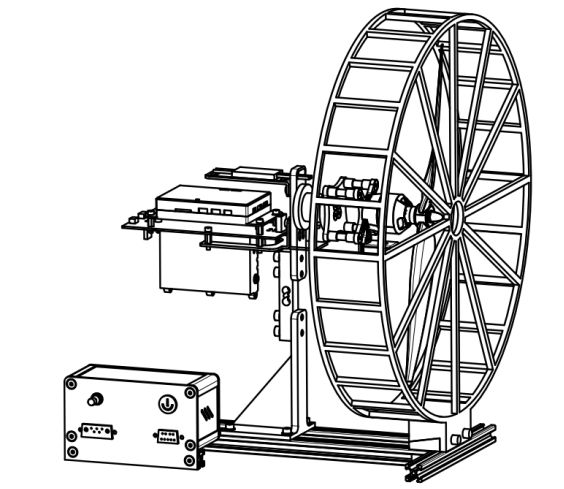
WF-EDU-02无人机动力测试教学仪实验套装
实验教学目的:
1. 了解动力系统性能参数以及性能特性曲线;
2. 理解动力系统性能参数及特性曲线对无人机、动力系统、电机、螺旋桨的性能分析及影响;
3. 掌握动力系统性能参数及性能特性曲线的测试方法;
一、实验教学原理讲解:
1. 动力系统性能参数及性能特性曲线
动力系统七项性能参数有拉力、扭矩、总功率、轴功率、电机效率、螺旋桨力效、系统力效。其中拉力、扭矩为测试台的基本测试参数,其他的五项性能参数都是基于测试台的基本测试参数计算衍生而来。
无人机动力系统在无人机飞行过程中,运行状态不断发生改变,因此动力系统的性能无法通过简单或者单一的性能参数进行判定。动力系统的性能分析主要依据性能特性曲线,动力系统性能特性曲线表示动力系统油门值从0到100%的全部运行工况。动力系统的特性曲线有油门特性曲线和转速特性曲线,油门特性曲线即横坐标为油门,纵坐标为动力系统性能参数的特性曲线;转速特性曲线即横坐标为转速,纵坐标为动力系统性能参数的特性曲线。
油门特性曲线主要针对动力系统整体或者电机的性能分析,其中油门-拉力、油门-总功率、油门-系统力效特性曲线主要用于动力系统整体性能分析;油门-扭矩、油门-电机效率主要用于电机的性能分析。
转速特性曲线主要针对螺旋桨的性能分析,主要有转速-拉力、转速-扭矩、转速-螺旋桨力效特性曲线。
1.1 拉力及拉力特性曲线
拉力是保证无人机安全起飞的最为关键的性能参数之一,无人机拉力的大小以及油门-拉力特性曲线直接关系到人机的起飞重量、载重量、操纵性(垂直爬升速度、飞行速度)以及安全控制裕度;拉力由螺旋桨产生,因此也是螺旋桨的重要性能参数之一,转速-拉力特性曲线可以很好体现螺旋桨的拉力特性。
油门-拉力特性曲线:
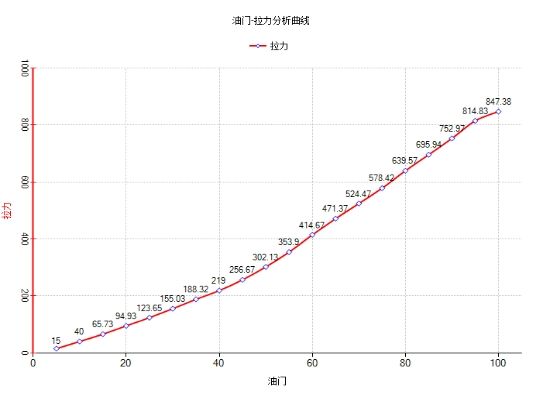
图2-1油门-拉力特性曲线
油门-拉力特性曲线表示的是不同油门位置下所对应的拉力值,通过油门-拉力曲线可以准确的找到悬停拉力对应的油门位置,并以此来判断动力系统的拉力是否适配无人机的起飞重量。
a.一般以电池的标称电压进行测试,40%-60%油门处拉力是否满足悬停所需拉力,作为无人机在当前起飞重量下飞行的第一安全要素;(针对动力系统不同的油门-拉力特性曲线,或者无人机不同的设计需求,满足悬停的拉力油门百分比会做不同的选取,例如穿越机的悬停油门可能会低于40%。)
b.无人机起飞重量一定要在一定的安全系数内,一般安全系数取最低电量状态下拉力的70%(经验值),即电池低电压状态下70%油门拉力不得小于无人机悬停所需的拉力。
转速拉力特性曲线:
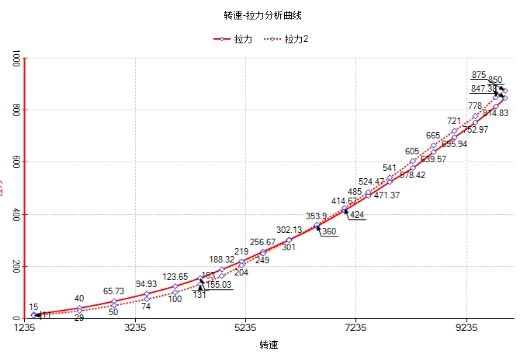
图2-2转速-拉力特性曲线
转速-拉力特性曲线表示的是螺旋桨在不同的转速下所产生的拉力值,可以对不同参数或者不同外形轮廓的螺旋桨进行转速-拉力曲线对比分析。
2.2 扭矩及扭矩特性曲线
扭矩参数即螺旋桨的反扭矩,代表着螺旋桨旋转产生的空气阻力,转速-扭矩特性曲线表示的是螺旋桨在不同的转速下对应的空气阻力特性;螺旋桨产生的反扭矩由电机产生的扭矩平衡,因此扭矩又代表着电机的负载,油门-扭矩曲线体现了电机的动力输出性能。
转速-扭矩特性曲线:
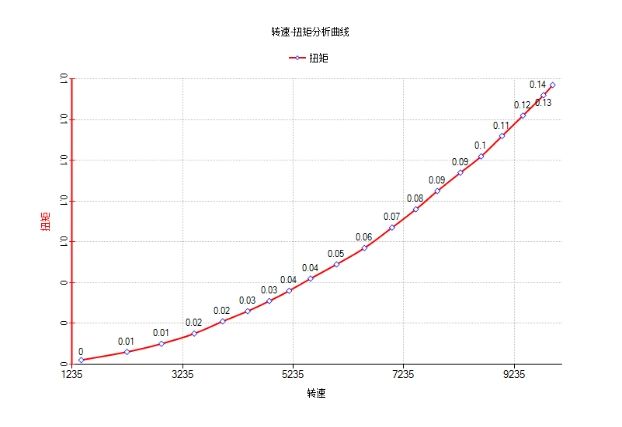
图2-3转速-扭矩特性曲线
油门-扭矩特性曲线:
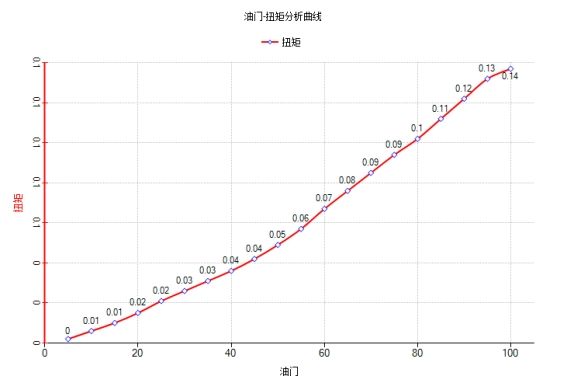
图2-4油门-扭矩特性曲线
1.3 总功率
总功率是无人机动力在运行的过程中总体消耗的功率,包含着电机带动螺旋桨转动做功的功率和动力系统的热能消耗(电流的热效应),是无人机航时计算的重要性能指标,计算公式是:
 (W)
(W)
其中 指的是动力系统的输入电压,即电池电压,单位为 V;
指的是动力系统的输入电压,即电池电压,单位为 V; 指的是动力系统的流,单工作电流位为 A。动力系统悬停功率、巡航功率是用来评价飞机航时性能的重要参数之一。
指的是动力系统的流,单工作电流位为 A。动力系统悬停功率、巡航功率是用来评价飞机航时性能的重要参数之一。
油门-总功率特性曲线:
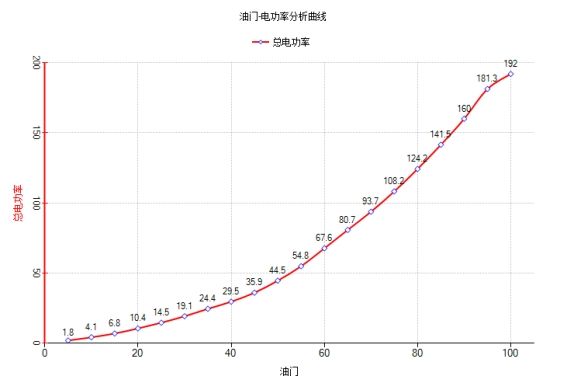
图2-5油门-总功率特性曲线
油门-总功率特性曲线表示的是不同油门位置下所对应的动力系统耗总体电功率,可以根据悬停油门或者巡航油门在曲线上找到对应的功率消耗值,并以此计算无人机的悬停或者巡航状态下的航时。
1.4 轴功率
轴功率是动力系统中电机将电功率转化为机械能的功率部分,又称为电机的输出功率,该功率是指电机带动螺旋桨旋转克服空气阻力做功产生的功率。计算公式是:
 (W)
(W)
其中为螺旋桨的转速,计算单位为,指的是螺旋桨产生的反扭矩,单位为。上节中已经提到过转速和扭矩的概念,而电机的轴功率就是二者的乘积。
油门-轴功率特性曲线:
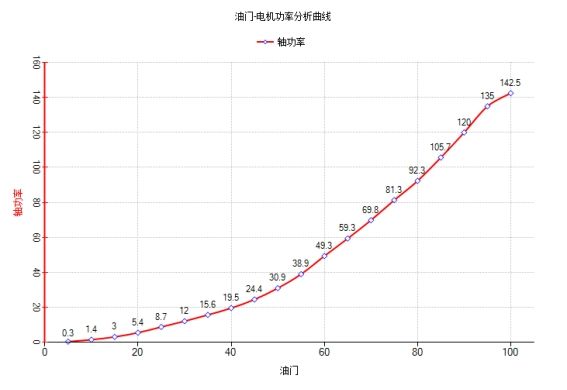
图2-6油门-轴功率特性曲线
油门-轴率特性曲线表示的是不同油门位置下所对应的电机的轴功率,体现了电机的动力输出性能。
1.5 电机效率
电机效率是电机将电能转化为机械能对外做功的效率。电机效率高低主要取决于电机的设计水平、制造工艺、选材等方面的因素,因此电机效率直接体现了电机效率性能的优劣。
总功率包含着电机带动螺旋桨转动做功的功率(轴功率)和动力系统的热能消耗(电流的热效应)功率,其中热能消耗的部件主要有电调和电机的定子绕组部分,电调作为电机的控制单元,因此在热能消耗上算作电机的一部分。电机效率即电机的轴功率,在总功率中的占比,公式为:

油门-电机效率曲线:

图2-7油门-电机效率特性曲线
油门-电机效率特性曲线在确定负载的情况下,可以很好的对不同电机进行选型优化。针对一款电机,当负载产生变化会对电机的油门-电机效率特性曲线产生比较大影响,因此无法完全通过油门-电机效率特性曲线判断确定电机选型。
1.6 螺旋桨力效
螺旋桨力效代表旋翼螺旋桨综合效率,力效的实际意义为每1W功率可以产生多少克拉力,单位为g/W,这里功率指的是驱动螺旋桨转动抵消螺旋桨反扭矩所需要的功率,即电机的轴功率。螺旋桨力效的计算公式为:
 (gf/w)
(gf/w)
注:“力效”一概念是在旋翼无人机的基础上提出的一个效率概念,在原先固定翼的计算公式下,旋翼螺旋桨的效率会被计算成0,所以提出了“力效”的概念。
转速-螺旋桨力效特性曲线:
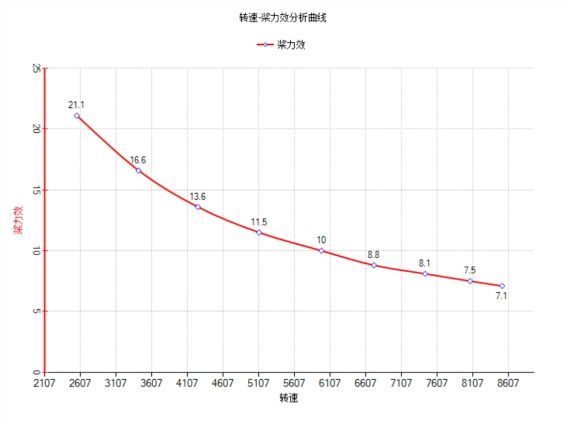
图2-8转速-螺旋桨力效特性曲线
转速-螺旋桨力效特性曲线直接体现了旋翼螺旋桨的效率性能,但在螺旋桨性能分析时,一般会结合着转速-拉力特性曲线对螺旋桨的性能做综合判断,无法只通过转速-螺旋桨力效判断螺旋桨的综合性能,完成螺旋桨的优化选型。螺旋桨优化选型主要依据拉力-螺旋桨力效特性曲线。
1.8 系统力效
系统力效(g/W),指动力系统总功率中每1W功率可以产生的拉力,是无人机整机飞行效率最直观的参数,是直接反应无人机功耗及效率的重要参数,其计算公式为:
 (g/w)
(g/w)
电机效率、螺旋桨力效和系统力效的关系是:

因此,系统力效包含着电机效率与螺旋桨力效两个部分,体现无人机整机的综合效率。
油门-系统力效曲线:
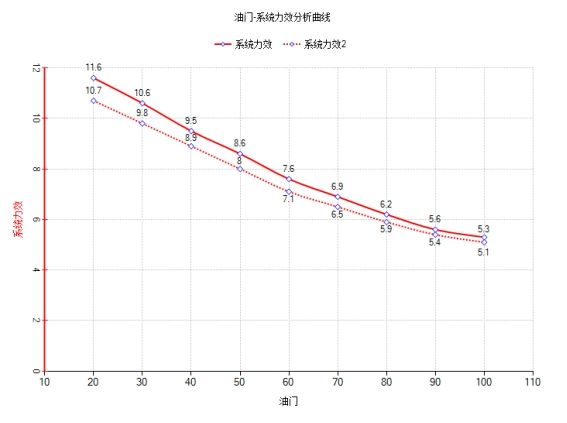
图2-10 油门-系统力效特性曲线
两组匹配选型的动力系统,通过油门-系统力效特性曲线分析,能够直接选出无人机整机效率最优的动力系统选型匹配方案。
二、实验实训内容
1.实验准备:
实验器材、工具准备;
WF-EDU-02测试台:测试台主体、隔离笼、电源线、数据线;
动力系统:20A电调、3S电池(可采用测试台内部电源替换)、两组电机和螺旋桨;
其中共两组电机和螺旋桨:
第一组电机和螺旋桨:电机型号为2312-KV1000,螺旋桨型号为9450;
第二组电机和螺旋桨:电机型号为2312-KV800,螺旋桨型号为1045;
其他装配工具:内六角、螺栓、螺旋桨拆装夹。
课程四实验器材及工具准备
器材
型号
数量(备注)
动力系统
电机
2312 KV1000
1个
2312 KV800
1
螺旋桨
9450
正桨 1个
1145
反桨 1个
电调
20A
1个
测试台及安装工具
主体
1个
隔离笼
1个
电源线
1个
数据线
DB9
1个
电机座
快拆
1个
内六角
2.5mm
1个
螺栓
4个
螺旋桨拆装夹
1个
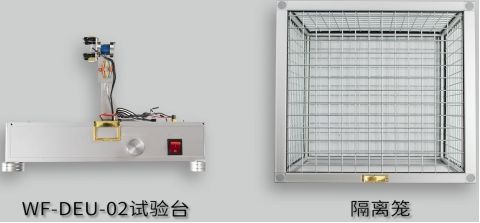

图2.1 实验器材及工具
2.动力系统自动测试
(1)参照实验课程1和课程2的操实验步骤完成第一组电机与测试台的安装、测试台上电、软件连接以及电调行程校准以及电机转向调整与第一组螺旋桨安装,将电压调整为11.4V。
(2)打开安全保护界面,保护方式设置为警告并关闭油门,点击使能保护,电流保护设置阈值为15A,温度保护设置为60摄氏度。


图2.3.1 安全保护设置窗口
(2)点击测试信息,并在软件测试信息栏中填写测试信息,进行保存。

图2.2 测试信息填写
(3)可以采用两种方式完成自动测试设置
第一种方式:点击测试软件中的自动测试选项卡,设置测试模式为“增长”,可通过油门增长量、保持时间对所有的油门点进行统一设置,此次测试可设置单次增长量为5%,油门点持续时间为5s,点击保存。
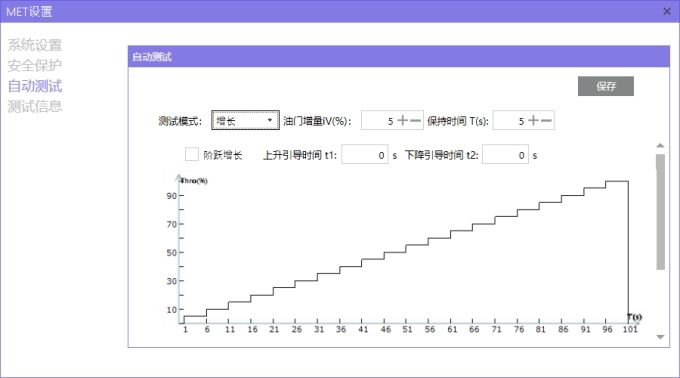
图2.3 自动测试“增长”模式设置
第二种方式:击测试软件中的自动测试选项卡,设置测试模式为“自定义”,可增加或减少测试点位,并且可以设置每个点位的测试油门值及保持时间(单位为0.1s),设置完成后,点击保存。

图2.3 自动测试“自定义”模式设置
注:由于动力系统的实际工作状态,油门值一般都在20%以上,所以无人机动力系统测试数据一般不需要从0%的油门点开始进行测试,可以以10%或20%的油门点位作为第一个测试点位进行测试。
(4)调整测试台电压为11.4V,并点击拉扭清零和电流清零,点击油门解锁,最后点击自动测试,WF-EDU-02测试台开始自动测试;自动测试结束,软件自动保存数据。
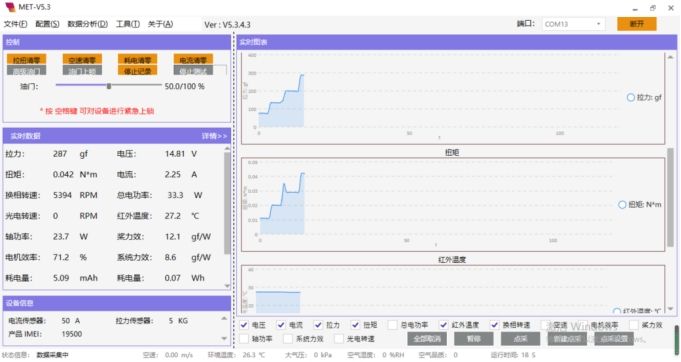
图2.3 自动测试“自定义”模式设置
3.性能特性曲线数据分析
(1)点击工具栏中的数据分析,打开数据分析软件,图表视图区域将自动加载数据,通过勾选显示数据项可以查看各项测试参数的测试图表。
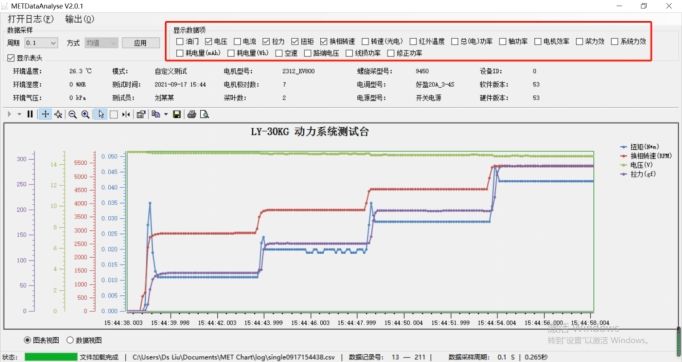
图2.4 数据分析软件界面
(2)测试数据处理:使用数据分析软件中的输出→油门点均值功能,将Excel数据输出到桌面,重命名为“自动测试数据1-时间-测试人员”,并打开查看;
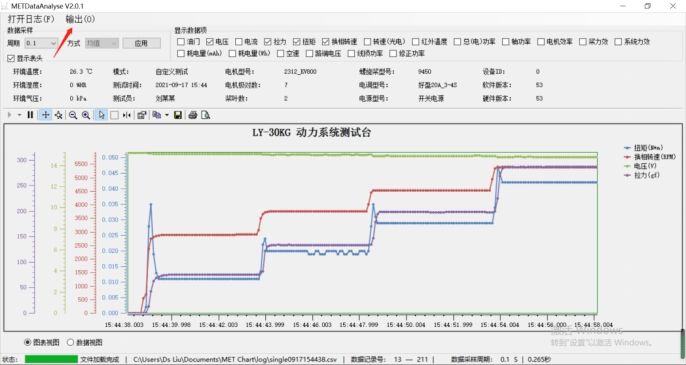
图2.5 点击输出→油门点均值

图2.6 数据分析软件界面
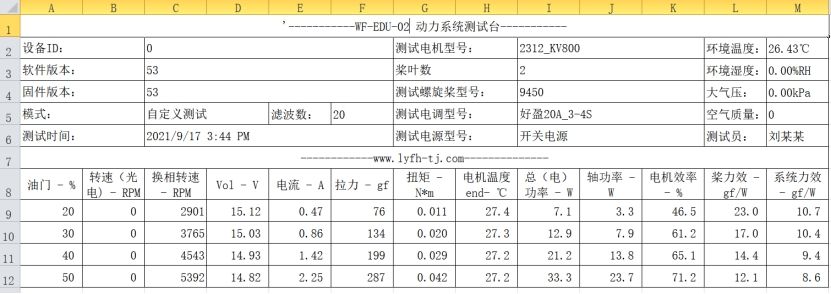
图2.7 测试数据报告
(3)按照自动测试及数据分析的操作流程完成第二组数据(2号电机,2号螺旋桨)测试。
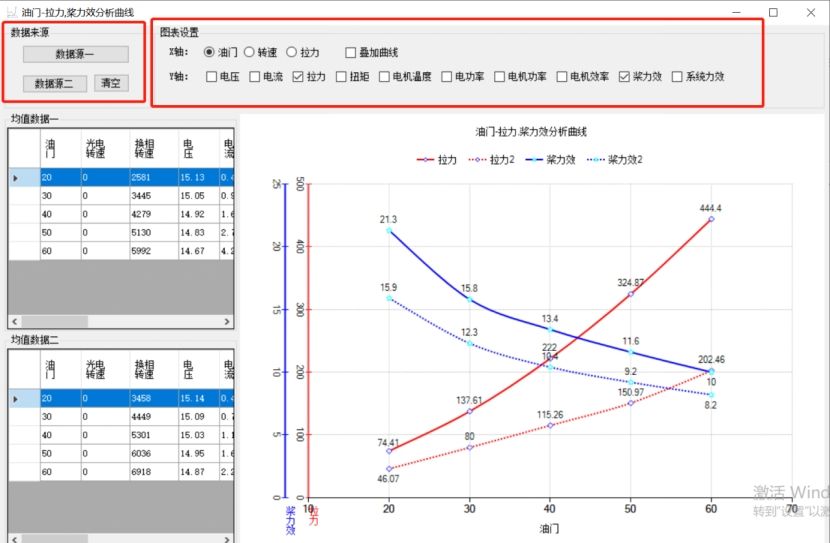
(4)使用数据分析软件中的输出→曲线分析功能,打开曲线分析窗口;通过数据来源窗口中的数据源一和数据源二进行数据添加(所添加的数据必须为相同的自动测试模式测试得出,并在数据分析软件中导出为油门均值数据);在图表设置窗口,点击不同选项,可以设置分析曲线的X轴和Y轴,来显示不同的特性曲线。
实验小结:
本节课程实验分为两个部分:一是实验原理讲解部分,对动力系统基本性能参数以及性能特性曲线全面的讲解,内容包含动力系统性能参数及特性曲线对无人机、动力系统、电机、螺旋桨的性能分析及影响。二是实验实训部分为测试台数据测试及性能特性曲线数据分析的实验实训部分。
注:实验课程完毕后,请将实验器具恢复至实验前状态,将实验器材及工具放回到指定位置。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)