A-LOAM学习
- 一、复现
- 1.1 Ubuntu 和 ROS
- 1.2 Ceres Solver
- 1.3 PCL
- 二、下载A-LOAM
- 三、下数据集
一、复现
1.1 Ubuntu 和 ROS
A-LOAM

1.2 Ceres Solver
git clone https://ceres-solver.googlesource.com/ceres-solver
sudo apt-get install cmake
sudo apt-get install libgoogle-glog-dev libgflags-dev
sudo apt-get install libatlas-base-dev
sudo apt-get install libeigen3-dev
sudo apt-get install libsuitesparse-dev
cd /home/nj/ceres-solver
mkdir build
cd build
cmake ..
sudo make install
1.3 PCL
参考ubuntu20.04下安装pcl
先VTK后PCL
直接下面此命令
sudo apt-get install libpcl-dev
二、下载A-LOAM
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/A-LOAM.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash
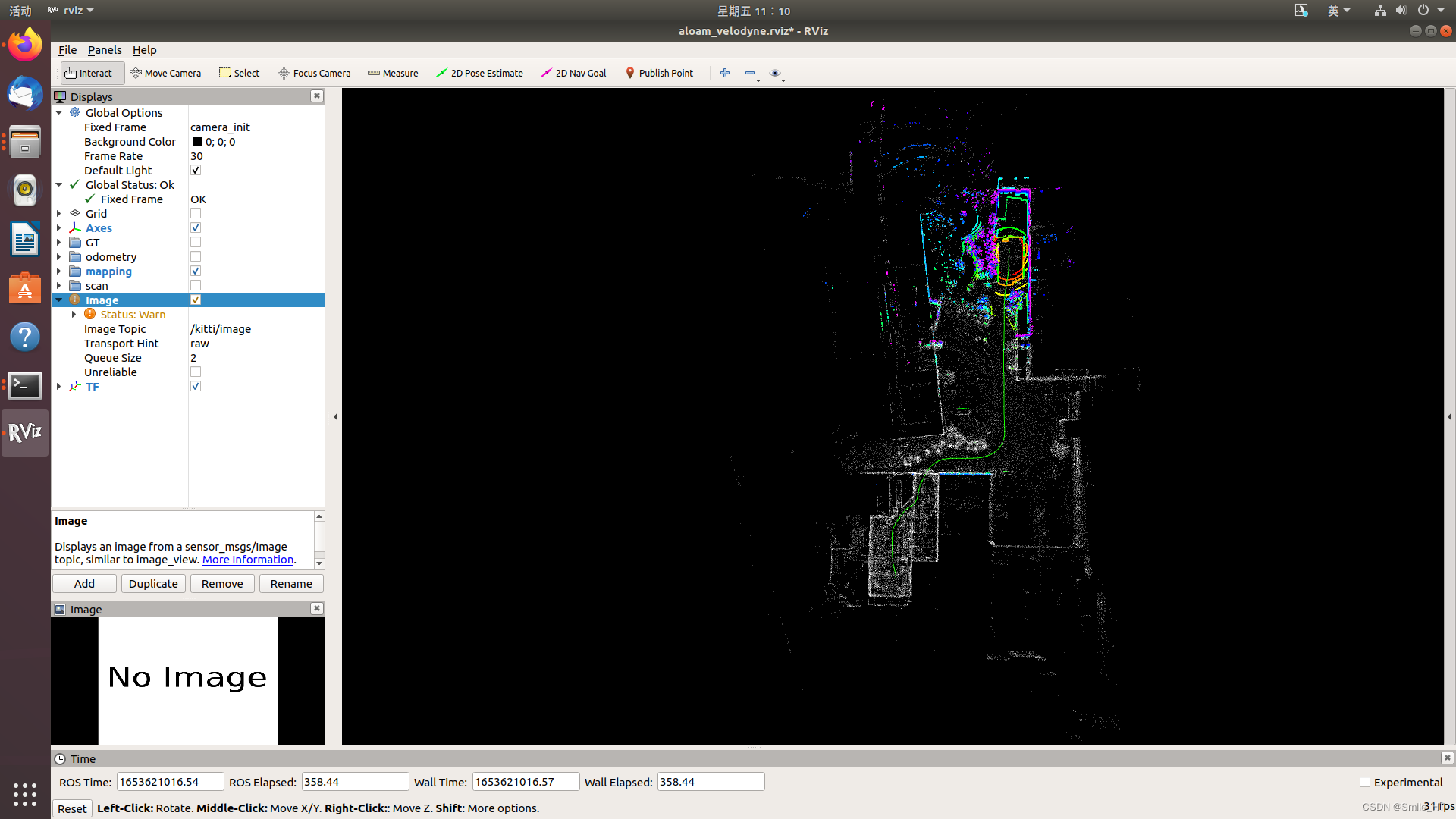
三、下数据集
下载 NSH indoor outdoor
roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch
rosbag play YOUR_DATASET_FOLDER/nsh_indoor_outdoor.bag
 后面有研究代码解析,有时间再写吧
后面有研究代码解析,有时间再写吧
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)