激光雷达Velodyne16配置
- 一、配置IP
- 二、安装ROS依赖
- 三、创建工作空间
- 四、录制bag数据包
硬件准备:连接电源线及网线
一、配置IP
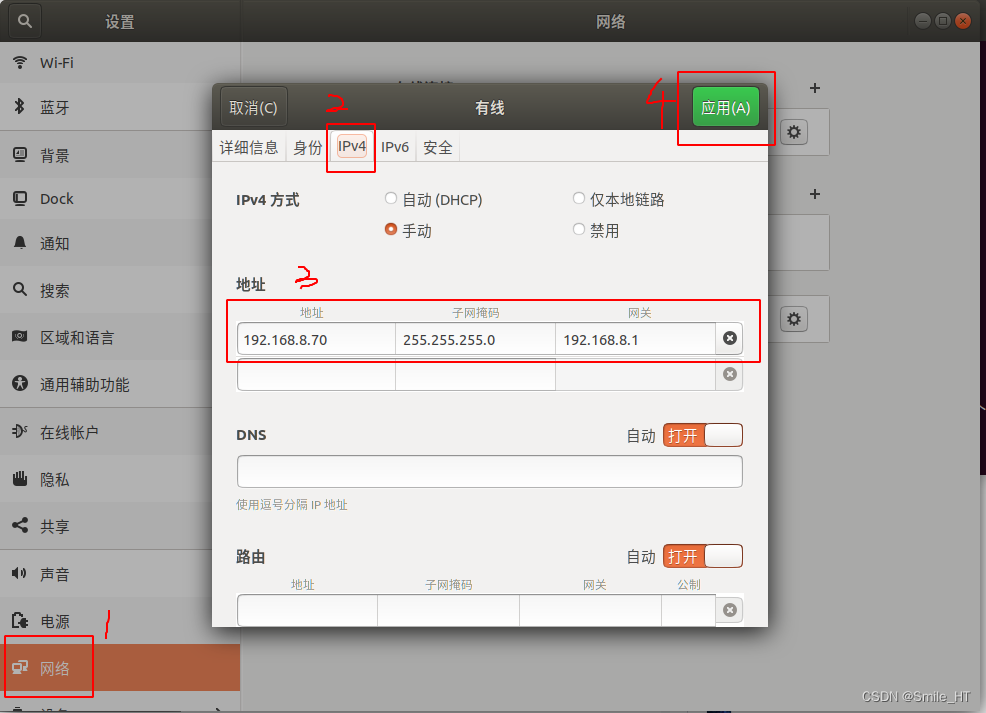
1.设置有线的IP地址
设置->网络->有线连接->IPV4->手动
地址: 192.168.8.70
掩码: 255.255.255.0
网关: 192.168.8.1
点击应用
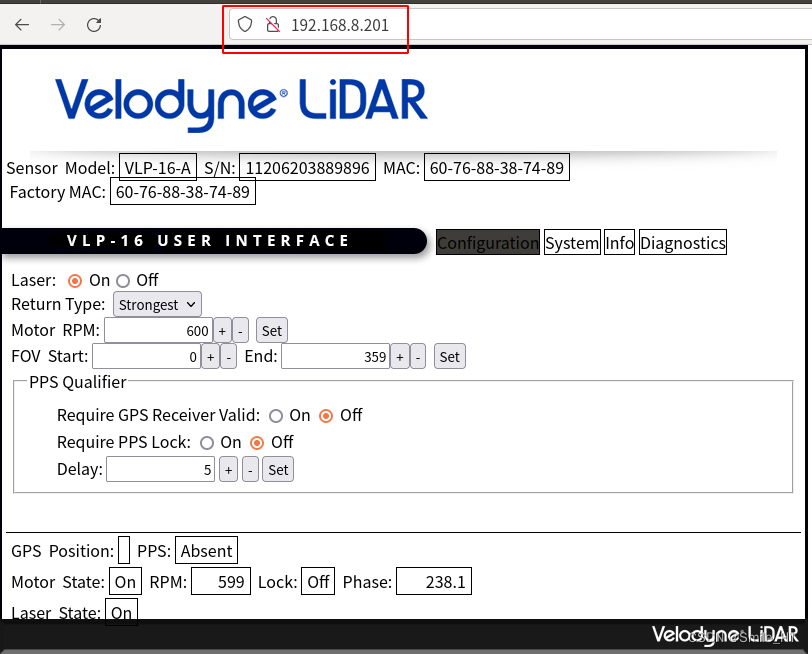
 2.打开浏览器,输入 192.168.8.201,为激光雷达的配置参数
2.打开浏览器,输入 192.168.8.201,为激光雷达的配置参数
以下命令用来检测数据情况
ping 192.168.8.201
 # 二、安
# 二、安
二、安装ROS依赖
sudo apt-get install ros-melodic-velodyne
三、创建工作空间
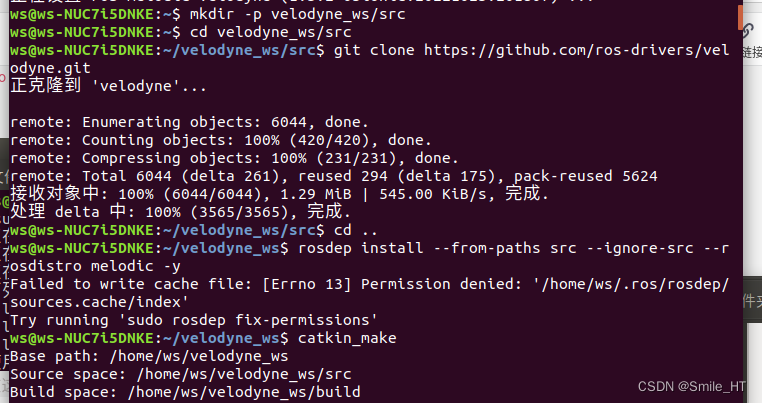
1.创建ROS工程->下载包->编译
mkdir -p velodyne_ws/src
cd velodyne_ws/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro melodic -y
catkin_make
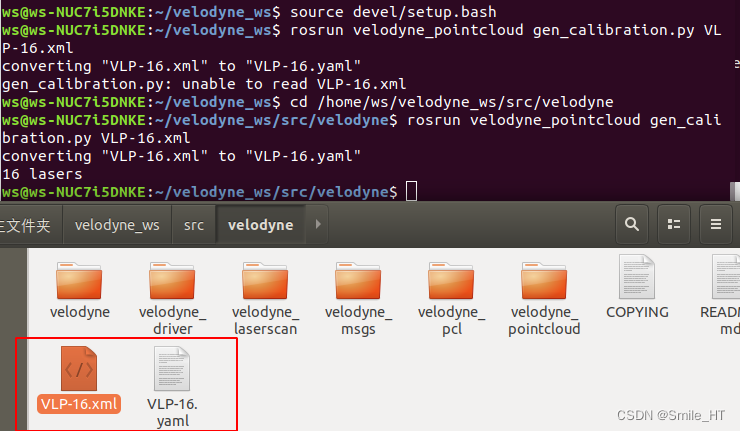
2.XML文件转成ROS节点的YAML文件
下载VLP-16.xml转换为.yaml文件
source devel/setup.bash
cd /home/ws/velodyne_ws/src/velodyne
rosrun velodyne_pointcloud gen_calibration.py VLP-16.xml
roslaunch velodyne_pointcloud VLP16_points.launch calibration:=VLP-16.yaml

3.启动:出现以上情况用如下命令重新启动
roslaunch velodyne_pointcloud VLP16_points.launch
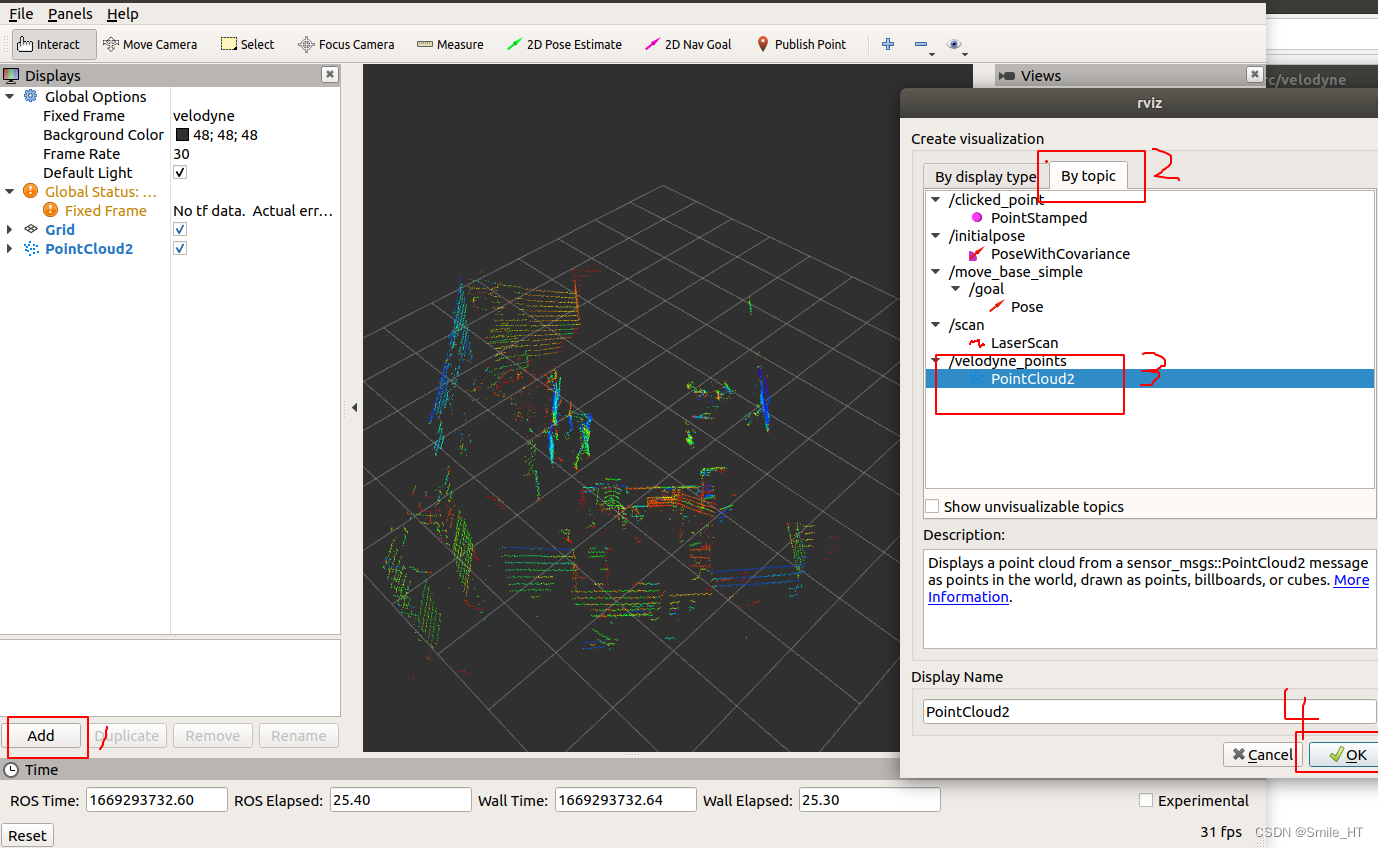
4.实施显示点云地图
rosrun rviz rviz -f velodyne
四、录制bag数据包
rosbag record -O out /velodyne_points
rosbag play out.bag
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)