本文不适合初学者;干货多没写具体方法,目前还在数论分解和思考中,估计得2个月后完成。
必要性:
1.常规VIO系统如VINS-MONO建立的地图质量太差,稀疏且不便认知
2.假设并入D相机,无论紧耦合还是松耦合,工作量依旧巨大(进行中)
3.自家硬件与光学相机在光学侧的调整能力越来越强,如光圈的控制,曝光时间的控制,全局快门等变化
4.DSO等直接法在纯视觉侧建图优势很大
5.DSO等直接法仍然没有解决视觉导航的各种问题(无纹理等blabla见前文),需要耦合IMU预积分并入,并辅助以对应手段解决极端场景。
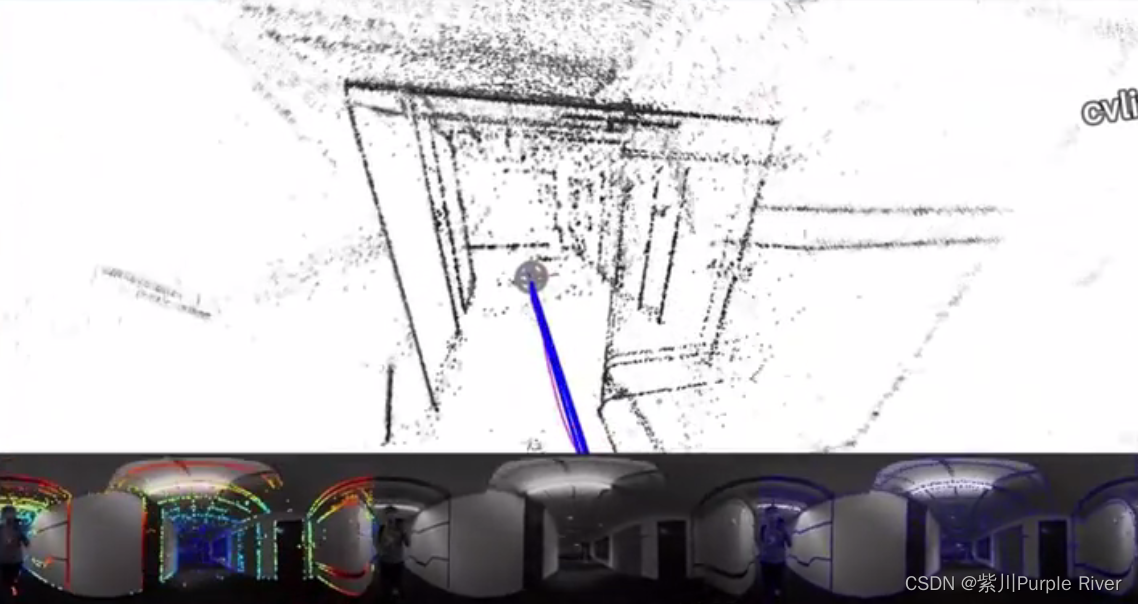
6.如果想用纯视觉DSO得到更鲁棒的位置姿态与建图,只能依赖硬件,如下图(来自港科大的新成果)所示的使用360度鱼眼相机,但这一方面提升了成本,一方面对后端算力平台的要求更高了。
DSO的作者很厉害,无论是数论还是代码本身都很强,但缺点就是导致了DSO本身的代码虽然精简,但是并不容易理解,先说一下对DSO关键点的理解:
DSO- D:直接 S:稀疏 O:里程计,看着有点矛盾,但是实现很好。
1. DSO是前后端的联合优化,本身连初始化都是个优化,导致初始化很困难,不带旋转画矩形,再互走几个对角线比较容易完成初始化,上来就不适合机器人场景。。。必须优化。
2. 初始化如果失败(RMSE双倍于前帧),采用了一个策略模拟27个旋转平移,实际代码里是26个,xyz各有正负零3个状态,还有一个全零状态未在代码体现,共27个。
3. Host frame和Target frame分离设定,每一个激活点对应3个残差进行处理,分别各自对应2个关键帧与点本身的逆深度。在整个滑动窗口SWF的7个关键帧中进行优化。
4.Frame Hession/ Point Hession/ Point Frame Residual三个状态实例和EF后端的类互相持有指针,在整个里程计中不断传递优化及更新返回。(这设计很高效,但是也导致了改动的难度很大。)这一点是DSO能够有更加理想建图效果的核心之一。
5.有3个最关键的Jacobian,分别是图像梯度(或位姿),逆深度,光度误差(相机内参),对应到3个残差进入Jacobian矩阵Jk联合优化。
6.Outlier处理使用了Huber norm,使用LM法优化时,逆深度与光度误差都是平滑函数,仅迭代一次,针对图像梯度(黑白)的优化采用了关键权重Wp并持续迭代,导致对图像梯度优化的依赖很高。这3个优化都是针对同一个状态的线性化点,是FEJ的标准体现。
7.建图方面,使用了中心点与7邻域(非标准8邻域,图到处有不画了)的设计,每次逆深度投影都涉及8个点;(1)设定了2000个激活点的阈值(点有4种状态:Active/Marginalization /Candidate/Outlier),对应32x32的块并分解为dxd(动态自适应),不断地通过策略调整。(2)Tracking方面用的标准极线搜索,Depth只给初值后续不断迭代优化,2帧间4层LK法进行tracking。(3)持续激活Candidate点至Active,维护了一整个调度空间保持图像中特征点均匀,激活策略很巧妙,这部分代码一般不涉及修改不描述了。这一点是DSO能够有更加理想建图效果的核心之二。
8. Marginalization策略,这个很正规了,保留最新2帧+视差判断法+设定个欧式距离判定条件筛>7的帧,不赘述。
DSO与IMU预积分联合SLAM思路:
我们组一直在VINS-MONO上拓展,首先考虑的就是将DSO整体并入VINS-MONO,但从上述DSO的特点就能看出来DSO初始化与前后端耦合度很高,这个难度是很大的。至少
(1)需要完成直接法+IMU联合初始化,这里有2种做法,一是先DSO初始化/再优化IMU,这个可行性略高;另一个就是联合初始化,完全没思路,先放放。
(2)需要重新构建Hession/信息矩阵,DSO的Frame Hession架构和其他SWF的差不多,单个位姿矩阵8维,6自由度+2个光度参数。相对于VINS的p/q/v/Ba/Bg的15维来说,改造难度不算太大,转为17维即可。
(3)需要重新构建残差矩阵,这个还直接关系到原VINS系统的3约束:先验约束/视觉重投影误差/IMU预积分。这个工作量就比较大了,也是必不可少的工作。DSO的整个残差构建完全不同于常规如ORB SLAM类的视觉重投影误差,同时涉及到了位姿(梯度),逆深度和光度误差,原来的Tk就已经有了3个权重,工程要大改。相当于变成了5项约束,先验约束也产生了变化。好的事情是VINS的基础PQV由IMU输入,视觉重投影虽然权重也高但是更接近辅助作用(在每2个关键帧之间加以强约束权重),这里还是一定会有好的构建和约束方法的。逆深度和光度误差迭代仅1次,可以快速固定下来,其实就相当于用图像梯度(位姿)优化去联合前面这2哥们去替代视觉重投影误差约束。想得很理想,具体做好再看效果了。
思路就是如上这样了,如果实操遇到逻辑问题死火的话,那就还是继续攻关D相机与DIO。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)