车规级激光雷达的技术路线之争,似乎已经逐渐明朗。
《高工智能汽车》注意到,目前,包括Innoviz以及国内一径科技、速腾聚创等越来越多的厂商先后推出了车规级MEMS激光雷达。
另外,需要特别注意的是,作为转镜方案代表的法雷奥SCALA,也将在第三代激光雷达产品中转向MEMS技术,预计在2022年左右开启量产。
这一切都在说明市场风向已经发生了改变,车载激光雷达正从机械旋转式向MEMS激光雷达演进。包括一径科技创始人、CEO石拓在内的业内人士认为,未来很长一段时间内,MEMS激光雷达将成为市场上的主流方案。
一、MEMS才是未来?
激光雷达的技术路线有很多,包含有机械式、MEMS、Flash、OPA等等。如果按照扫描模式、测距原理等多个独立的维度进行组合排列下来,理论上可行的激光雷达系统方案甚至还超过上百种。
目前机械式是自动驾驶公司采用较多的扫描方案,不过在实际落地中,机械式激光雷达却始终存在成本较高的问题。例如,64线Velodyne机械式激光雷达价格就在7万美元以上,这是下游车企们难以接受的价格。
因此,虽然以Velodyne为代表的机械式激光雷达上车较早,但却一直难以达到量产的要求。
一径科技联合创始人兼产品副总裁李云翔指出,车规级激光雷达能否实现大规模量产落地才是关键,这其中最为关键的就是成本控制,以及实际性能能否通过车规验证。
“目前国内乘用车激光雷达技术路线之争,实际上主要就是转镜式与MEMS两种技术路线的竞争。”李云翔补充表示,转镜方案最大的优势在于,有法雷奥Scala案例的背书——这是目前为止唯一已经通过车规认证、并实现了前装量产的技术方案。
众所周知,传统机械式激光雷达要实现更高线束,需要相应地增加发射模块与接收模块的数量,具有成本较高、装配困难、机械零部件寿命不长等缺点,较难应用在规模量产车型当中。
而转镜式激光雷达作为当前唯一真正通过车规验证且实现量产上路的方案,但缺点在于转镜的守护明问题以及难以轻易实现高线束输出。
然而,与机械式、转镜式方案不同的是,MEMS方案的核心光束操纵原件为微振镜,可以减少激光器和探测器的使用数量,极大地降低了成本,并且具备可靠性高、批量生产后成本低、超分辨率高等优势。

基于此,诸多业内人士表示,从长期来看,固态方案才是车载激光雷达的发展方向。但未来5年内,以MEMS等为主的半固态方案将占据主导地位。
根据《高工智能汽车研究院》数据显示,随着MEMS激光雷达量产的加速,接下来5年内,MEMS激光雷达市场份额将大幅提升,并有望抢占近半的市场份额,成为绝对主流的激光雷达量产方案。
“MEMS激光雷达由于零部件成熟度较高,并且易于集成和降低成本,可以有效克服传统的机械式激光雷达在寿命、成本和良品率等方面存在的问题,一旦实现量产将极具优势。”李云翔补充说道。
不过,MEMS也有一定的局限性,如果芯片或者器件设计不当,会因为外界的振动或者冲击导致失效。这非常考验企业的技术实力,特别是激光雷达系统设计、MEMS等核心芯片的设计能力。
二、谁真正具备前装量产能力?
激光雷达的前装量产序幕已经拉开。
一时间,无论是北汽、长城等传统车企,还是小鹏、蔚来等造车新势力,都在“抢装”激光雷达。例如,小鹏汽车宣布旗下第三款量产车将搭载大疆Livox的车规级激光雷达,而北汽ARCFOX也宣布搭载华为96线中长距激光雷达。
激光雷达前装量产有了明确的时间表,2021年也被业界称之为前装量产的元年。
那么,从激光雷达的实际性能来看,哪些才是真正的前装量产能力?
激光雷达最常见的显性参数包括线数、探测距离、测量精度、视场角、角分辨率、等,而隐性指标则主要指的是可靠性、安全性、使用寿命和规模量产一致性等。
据悉,整车厂提出的前装量产要求除了要满足显性参数要求之外,更加注重隐性指标的要求,具体主要体现在以下几个方面:
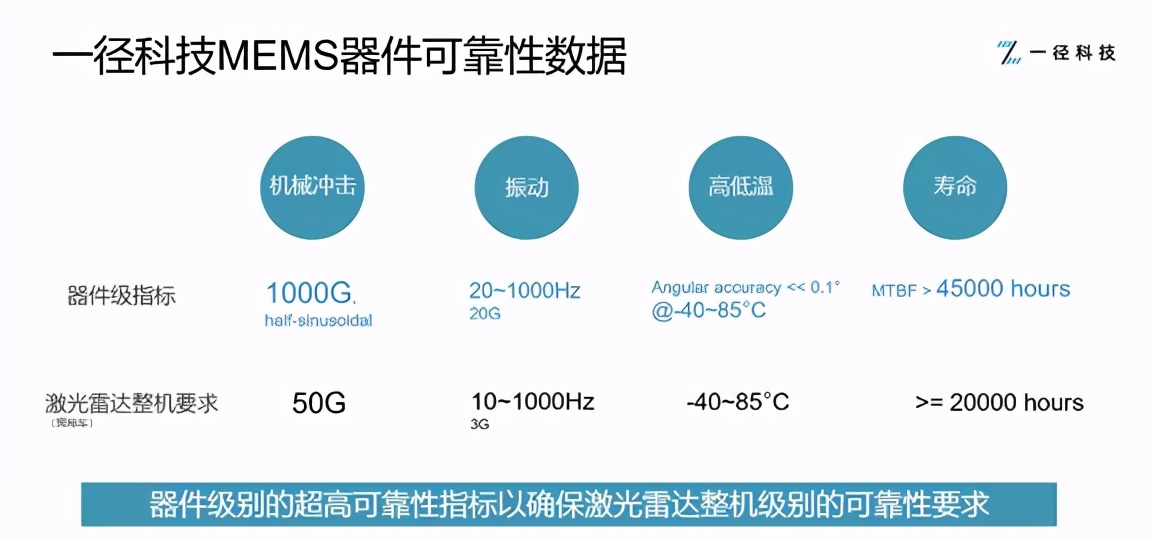
首先是性能必须满足车规要求,例如使用寿命、耐用性等需要大幅提升。李云翔提到,激光雷达要通过车规验证,需要进行车规振动、EMC、温度循环等测试,例如在-40℃-85℃的工作温度范围、振动以及冲击等严苛环境下,传感器能否正常工作、保持性能不变。
其次是实际的前装量产能力,如产能、产品生产的一致性保证等等。这要求激光雷达企业不仅需要具备产能要求,还要在设计产品时,做好整个产品技术架构及模块的布局,减少人工介入环节,保证后期大批量生产的一致性。
最后是成本。激光雷达的本质是一种由多种部件构成的光机电系统,光电系统成本大约占激光雷达整机成本的70%左右。这要求激光雷达企业不断创新技术,将光学芯片与其配套元件进行高度集成。
作为一家来自中国本土的MEMS激光雷达解决方案提供商,一径科技已经在端到端产品设计及研发能力、车规可靠性、前装量产能力,尤其是关键的光电芯片和ASIC芯片设计等方面形成了独特的竞争优势。
例如,一径科技车载激光雷达的可靠性,不仅来源于车规级器件的选型,还依赖于整体架构的设计,以及充分的可靠性测试验证。
与转镜方案相比,MEMS激光雷达没有成熟的案例可以借鉴。但是,一径科技早在成立之初就确定了要坚持MEMS方案,并且坚持从底层的芯片方案和元器件的创新开始着手研发,形成了从底层芯片方案到光学系统、硬件设计、产品功能、整机系统的完整供应链体系的独特竞争力。
一方面,一径科技一直坚持底层芯片和元器件的创新,目前其自研的LiDAR专有芯片和核心算法已经成型,同时其独立设计并拥有自主知识产权的激光雷达系统,已经被授予多项专利。
另一方面,一径科技已经在车规级认证以及前装量产能力方面具有领先的竞争优势。
《高工智能汽车》获悉,一径科技已经独自创新打造了MEMS激光雷达技术平台,并且建成了世界首条年产能5万台的车规级MEMS激光雷达生产线。这是一条严格按照车规体系搭建的MEMS激光雷达生产线,已经通过IATF-16949的符合性认证。
总体来看,一径科技提供的MEMS固态激光雷达产品,不仅具备高性能、小型集成化、可量产等特点,还能够满足商用车的可靠性标准(ISO-16750),其中包括2000Hz随机振动、50g的机械冲击以及-40-85℃的高低温循环等。
此外,一径科技还在激光雷达ISO26262功能安全、LiDAR清洗方案和量产标定方案方面开展了大量工作,全面推进车载应用产品。目前其提供的MEMS激光雷达具备完整的车载应用条件,包括车载通信、车规级接插件、功能安全及诊断等。
从产品设计、研发到验证、制造及成本方面,一径科技始终遵循汽车量产规格要求,这便是一径科技在激光雷达“前装量产”突围战中所具备的核心竞争优势。
三、大规模量产来袭
现阶段,一径科技共有两大类MEMS激光雷达产品,分别是ML-30s近场系列产品以及ML-Xs远场系列产品,可以提供面向车载应用的不同场景的MEMS激光雷达及解决方案。
其中ML-30S的视场角则达到140°×70°,等效线束高达160线,角度分辨率小于0.5°,主要应用场景是L4级自动驾驶车辆(含Robotaxi、重卡等)、低速车辆等。
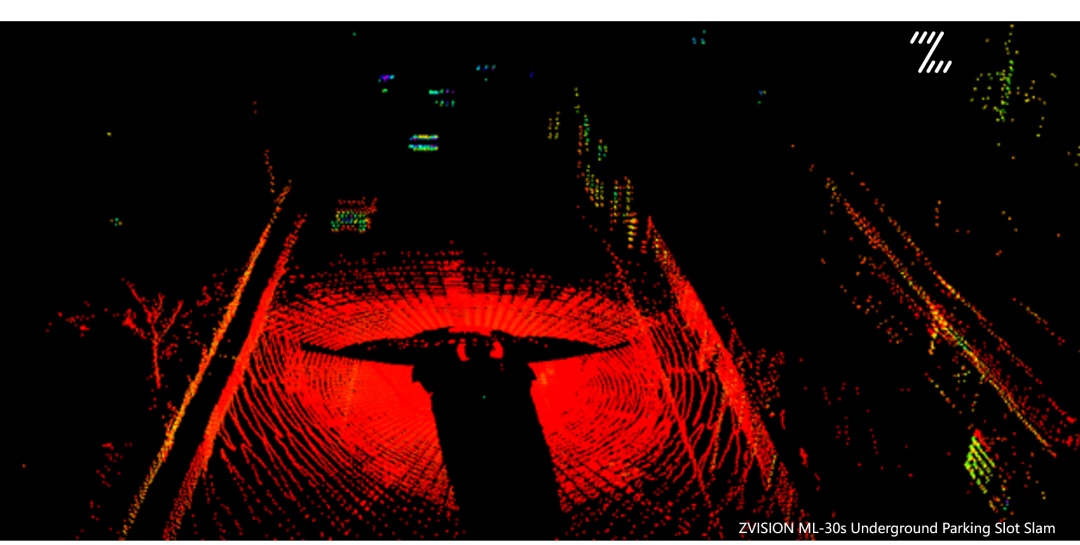
ML-30S点云图
实际上,ML-30S还是一款补盲产品,对包括车、人、路肩、墙壁等一系列细小物体均可以清晰辨别,且具备建图能力。
而ML-Xs的探测距离达到200m,等效线束为200线,角分辨率为0.1°,主打面向L2级以上的自动驾驶系统。
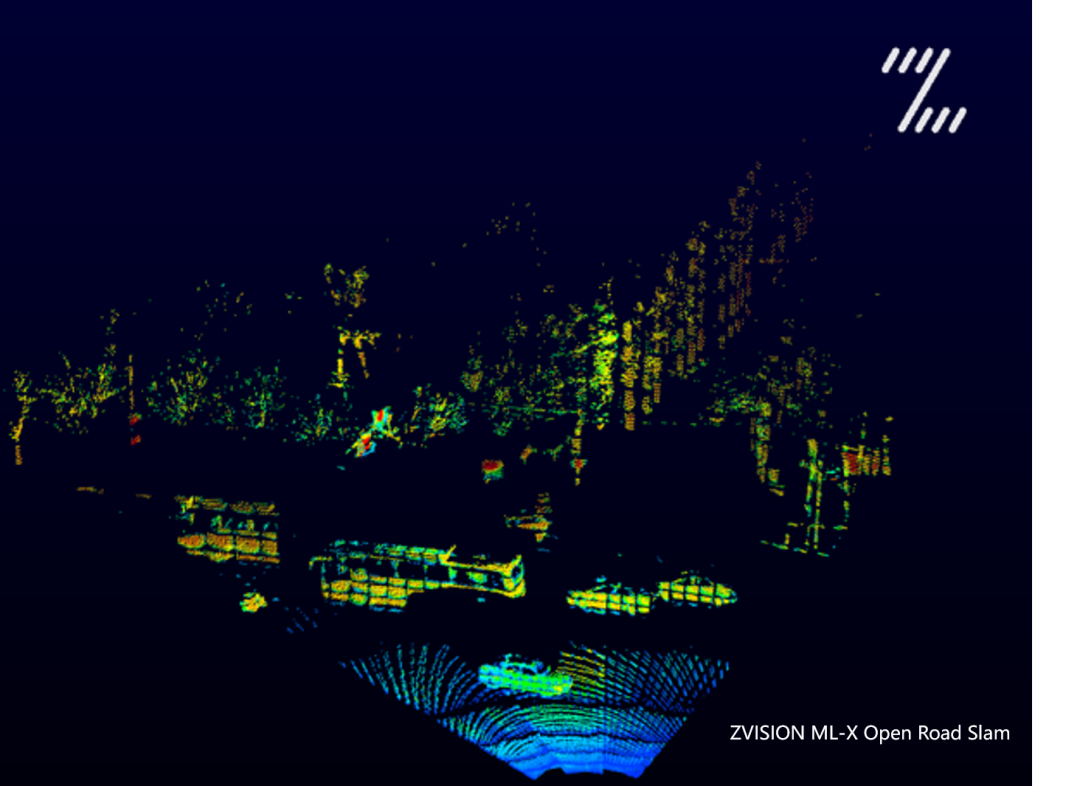
ML-X点云图
上述两大系列产品可以满足不同应用场景的需求,同时还可以进行灵活组合应用。例如,高速自动驾驶场景可以选择ML-X远场系列产品,泊车场景可以选择ML-30s近场系列产品,但也可以两个系列产品组合起来应用,以适应更高级别的感知需求。
比如,ML系列激光雷达产品提供的长距+中短距盲区结合解决方案,可以实现前向200m超远探测及车辆周身360°盲区覆盖的感知需求。
2021年,被视作为激光雷达进入前装车载的元年。多位业内人士曾向《高工智能汽车》表示,“激光雷达的量产路径大概率会从中短距到远距离,从满足基本分辨率要求到更高性能的路径演进。”
据悉,截止目前,一径科技已经拿到了多个细分领域的重要头部客户DesignWin项目,包括商用物流重卡、无人循环巴士、无人配送和Robotaxi等,已经实现了“多点开花”的落地路径。
按照规划,一径科技将在2021年年底将面向L3自动驾驶的长距激光雷达产品做到SOP量产。接下来的几年内,一径科技的车规级MEMS激光雷达前装量产之路将会加速进行。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)