stm32的i2c默认就是slave模式,本文基于HAL库实现中断方式的接收和发送,首先是初始化gpio和i2c,代码如下:
I2C_HandleTypeDef I2cHandle;
void HAL_I2C_MspInit(I2C_HandleTypeDef* i2cHandle)
{
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOA_CLK_ENABLE() ;
__HAL_RCC_GPIOC_CLK_ENABLE() ;
/**I2C3 GPIO Configuration
PA8 ------> I2C3_SCL
PC9 ------> I2C3_SDA
*/
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; //开漏输出(i2c需要这种模式)
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C3;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C3;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/* Peripheral clock enable */
__HAL_RCC_I2C3_CLK_ENABLE();
/* Peripheral interrupt init */
HAL_NVIC_SetPriority(I2C3_EV_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(I2C3_EV_IRQn);
HAL_NVIC_SetPriority(I2C3_ER_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(I2C3_ER_IRQn);
}
void I2c_config()
{
I2cHandle.Instance = I2C3; //此处使用i2c3
I2cHandle.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; //7位地址模式
I2cHandle.Init.ClockSpeed = 1000000; //时钟支持最高1M
I2cHandle.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; //关闭双地址模式
I2cHandle.Init.DutyCycle = I2C_DUTYCYCLE_16_9;
I2cHandle.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
I2cHandle.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
I2cHandle.Init.OwnAddress1 = 0X34; //器件地址
I2cHandle.Init.OwnAddress2 = 0;
if(HAL_I2C_Init(&I2cHandle) != HAL_OK) //调用初始化函数
{
/* Initialization Error */
Error_Handler();
}
HAL_I2C_Slave_Receive_IT(&I2cHandle,i2c_slave_recv,I2C_REC_BYTES); //开启从机中断接收
}
i2c3中断回调函数:
void I2C3_ER_IRQHandler() //异常回调
{
HAL_I2C_ER_IRQHandler(&I2cHandle);
}
void I2C3_EV_IRQHandler() //事件回调(接收或发送)
{
HAL_I2C_EV_IRQHandler(&I2cHandle);
}
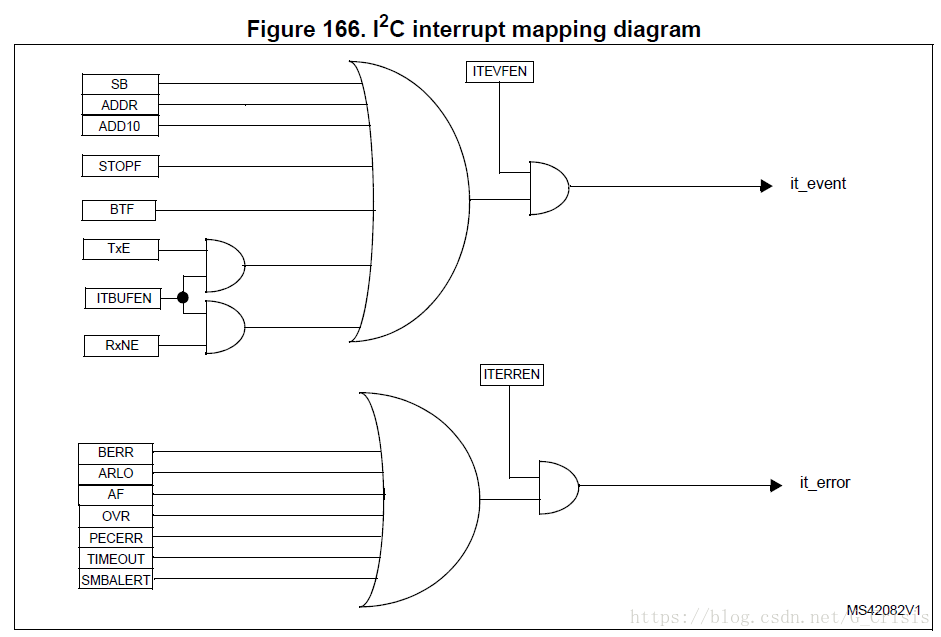
两个中断对应的中断事件如下图所示:
发送完成、接收完成和错误回调函数:
void HAL_I2C_SlaveTxCpltCallback(I2C_HandleTypeDef *I2cHandle)
{
//发送完成回调函数
{
//一些其他操作
}
HAL_I2C_Slave_Receive_IT(&I2cHandle,i2c_slave_recv,I2C_REC_BYTES);
{
//一些其他操作
}
}
void HAL_I2C_SlaveRxCpltCallback(I2C_HandleTypeDef *I2cHandle)
{
//接收完成回调函数
{
//一些其他操作
}
HAL_I2C_Slave_Transmit_IT(&I2cHandle,send_buffer,send_cnt);
{
//一些其他操作
}
}
void HAL_I2C_ErrorCallback(I2C_HandleTypeDef *I2cHandle)
{
//错误异常回调函数
}
实际操作时可以在接收完成中断中处理数据然后开启从机发送中断,在发送完成中断中开启从机接收中断,可以实现收发。
目前用HAL库发送必须将send_cnt的字节全部发送完成才行,不然通信会出问题。这个问题需要进一步解决。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)