(看了一下,有网上列表的探测范围数据与本文截图不太一致,本文截图来自livox官网手册)

有人问我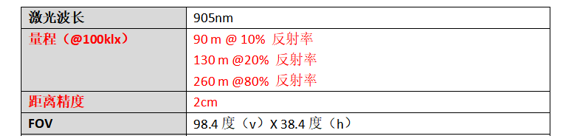
这个参数是什么意思,在此解释一下:激光打到不同的射物上,能反射回来的激光占发射出去的激光比例。
比如有个激光扫描指标:100m/30m(10%反射率),意思是正常反射条件下,激光扫描的有效距离100m,而对于10%反射率的反射物来说,激光扫描的有效距离是30m。
下面来介绍一下激光雷达的主要性能参数:
1、激光的波长:目前市场上三维成像激光雷达最常用的波长是905nm和1550 nm。
大疆该款激光雷达的波长为:1550nm,1550nm的LiDAR传感器可以以更高的功率运行,以提高探测范围,同时对于雨雾的穿透力更强。
而905nm的主要优点是……相对来讲比较便宜。
2、扫描频率:一秒内进行多少次测距输出。
较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。
但要提高扫描频率并不只是简单的加速激光雷达内部扫描电机旋转这么简单,对应的需要提高测距采样率。否则当采样频率固定的情况下,更快的扫描速度只会降低角分辨率。
3、测量距离: 激光雷达所标称的距离大多以90%反光率的漫反射物体(如白纸)作为测试基准。
激光雷达的测距与目标的反射率相关。目标的反射率越高则测量的距离越远,目标的反射率越低则测量的距离越近。因此在查看激光雷达的探测距离时要知道该测量距离是目标反射率为多少时的探测距离。
4、FOV(垂直+水平): 水平分辨率可以做得很高。一般可以做到0.01度级别。垂直分辨率为0.1~1度的级别。
5、测量精度:
6、出点数: 每秒激光雷达发射的激光点数。激光雷达的点数一般从几万点至几十万点每秒左右。
7、线束: 常见的激光雷达的线束有:16线、32线、64线等。多线激光雷达,就是通过多个激光发射器在上的分布,通过电机的旋转形成多条线束的扫描。理论上讲,线束越多、越密,对环境描述就更加充分。
8、安全等级: 激光雷达的安全等级是否满足Class 1,需要考虑特定波长的激光产品在完全工作时间内的激光输出功率,即激光辐射的安全性是波长、输出功率,和激光辐射时间的综合作用的结果。
9、输出参数: 目标的位置(三维)、速度(三维)、方向、时间戳(某些激光雷达有)等。
10、功率。
11、供电电压。
12、激光发射方式(机械/固态): 传统的采用机械旋转的结构,机械旋转容易导致磨损使得激光雷达的使用寿命有限。固态激光雷达主要由三类-Flash 、MEMS、相控阵。Flash 激光雷达只要有光源,就能用脉冲一次覆盖整个视场。随后再用飞行时间(ToF)方法接收相关数据并绘制出激光雷达周围的目标。MEMS激光雷达其结构相当简单,只要一束激光和一块反光镜。具体来说,激光射向这块类似陀螺一样旋转的反光镜就行,反光镜通过转动,可以实现对激光方向的控制。相控阵激光雷达利用独立天线同步形成的微阵列,相控阵可以向任何方向发送无线电波,完全省略了“旋转”这一步骤,只需控制每个天线发送信号间的时机或阵列,就能控制信号射向特定位置。
13、使用寿命: 机械旋转的激光雷达的使用寿命一般在几千小时;固态激光雷达的使用寿命可高达10万小时。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)