根据 CAN 规范的要求,总线上的所有器件都必须使用相同的比特率才能完成通信。然而,并非所有器件都要求具有相同的主振荡器时钟频率。所以,CAN 总线能够在一定的范围内容忍总线上 CAN 节点的通信波特率的偏差,这种机能使得 CAN 总线有很强的容错性,同时也降低了对每个节点的振荡器精度。所以,实际上,CAN 总线的波特率是一个范围。举个例子,假设定义的波特率是 250KB/s,但是实际上根据对寄存器的设置,实际的波特率可能为 200-300KB/s(具体值取决于寄存器的设置)。
首先了解一下 CAN 总线系统中的两个时钟:晶振时钟周期和CAN时钟周期:
- 晶振时钟周期:是由单片机振荡器的晶振频率决定的,指的是振荡器每震荡一次所消耗的时间长度,也是整个系统中最小的时间单位;
- CAN时钟周期:CAN时钟是由系统时钟分频而来的一个时间长度值,实际上就是一个时间份额TQ。计算公式:CAN时钟周期 = 2 × 晶振时钟周期 × BRP,其中BRP叫做波特率预分频值(baudrate prescaler);
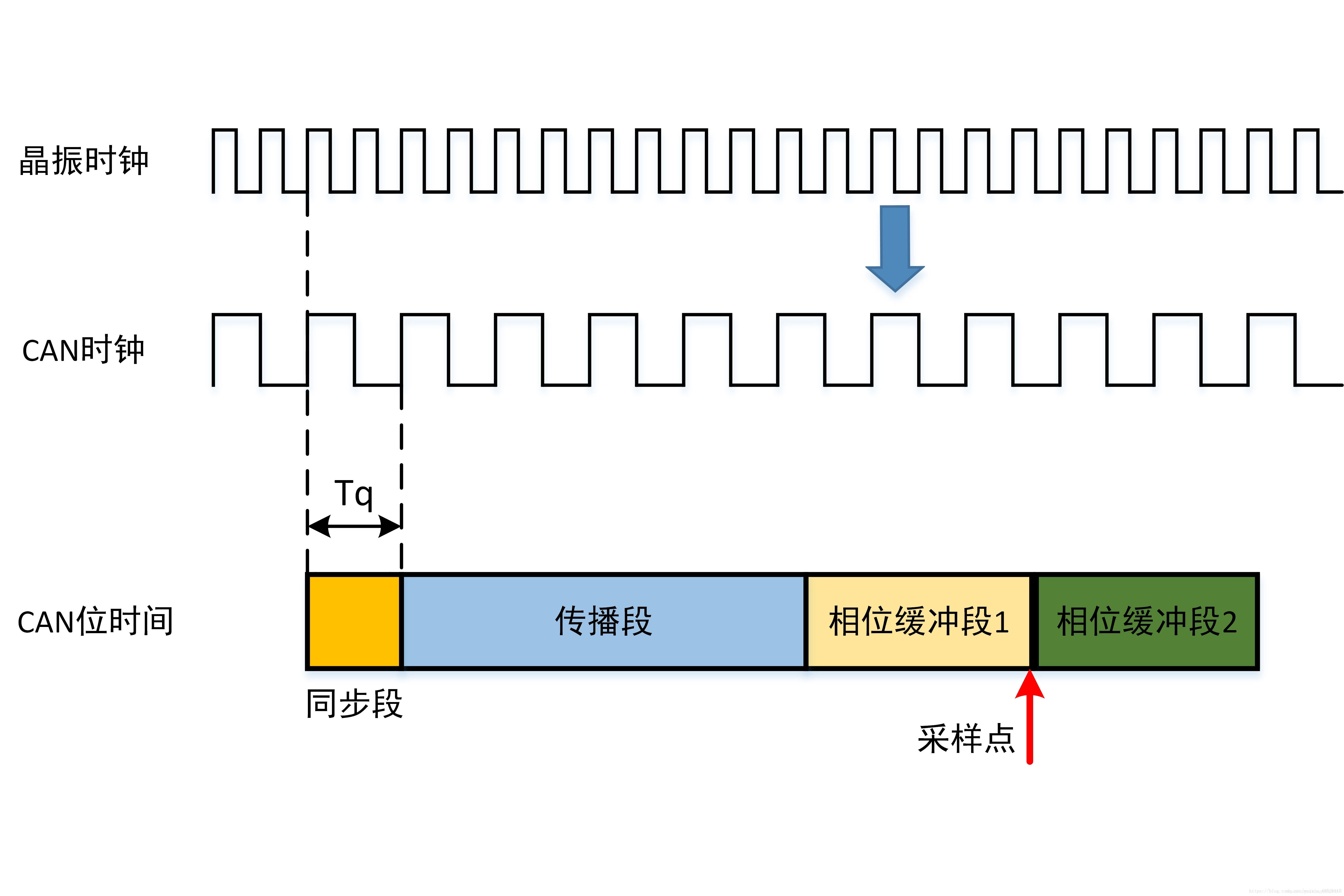
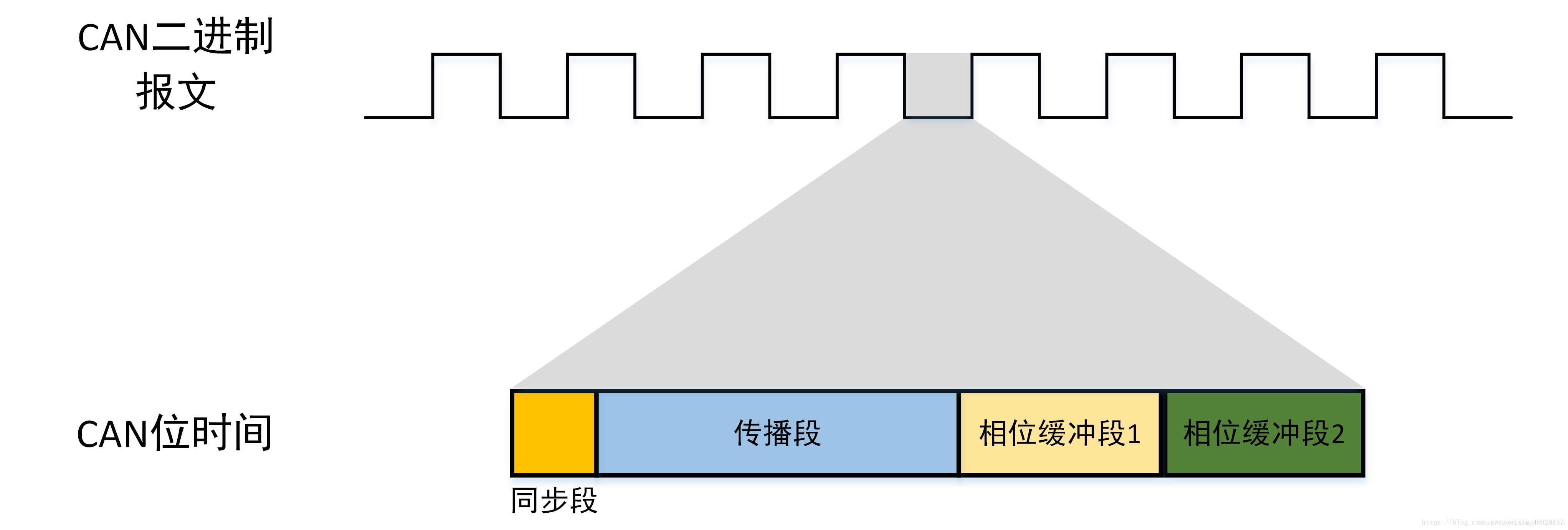
如上图所述,根据CAN规范,每一个CAN位时间 (Nominal Bit Time,NBT)被分成4个时间段:同步段(Sync_Seg)、传播时间段(Prop_Seg)、相位缓冲段1(Phase_Seg1)和相位缓冲段2(Phase_Seg2),如下图所示:
而采样点则设计在相位缓冲段1和相位缓冲段2之间。如下图所示:

如果用公式来表示,就是:

上述每个段又由若干个时间份额(time quanta,TQ)组成,时间份额 TQ 是位时间的基本时间单元,下面详细解释一下:
1、同步段(Synchronization Segment)
同步段(SyncSeg)为 NBT 中的首段,用于同步CAN总线上的各个节点。输入信号的跳变沿就发生在同步段,该段持续时间为 1 TQ。同步段用于同步总线上的各个节点,一个位的跳边沿在此时间段内。
2、传播段(Propagation Segment)
传播段(PropSeg)用于补偿各节点之间的物理传输延迟时间。传输延迟时间为信号在总线上传播时间的两倍,包括总线驱动器延迟时间。传播段的长度一般有一个取值范围,不同的控制器不完全一致,典型值为 1 – 8 TQ。
3、相位缓冲段(Phase Buffer Segment1)
相位缓冲段用于补偿节点间的晶振误差,又分为相位缓冲段1(PS1)和相位缓冲段2(PS2),在这个时间段的末端进行总线状态的采样。两个相位缓冲段PS1和PS2用于补偿总线上的边沿相位误差。通过再同步,可以延长 PS1(或缩短PS2)。
同理,不同的控制器,PS1/PS2 的取值范围不完全一致,一般 PS1 为 1 – 8 TQ,PS2 为 2 – 8 TQ。
4、采样点
采样点是位时间内的一个时间点。在该时间点,读取总线电平并进行分析。采样点位于相位缓冲段 PS1 的终点。但当采样模式设置为每位采样 3 次时例外。这种情况下,在 PS1 的终点仍然对某一位进行采样时,前两次的采样时间间隔为 TQ / 2,而该位的值将根据三个采样值中至少两次采样的相同值决定。
5、同步跳转宽度
同步跳转宽度(SJW)可通过编程设定为 1 – 4 TQ,它可对位时钟进行必要的调整来保持与发送报文同步。
例如,假设 FOSC = 20 MHz 时欲实现 125 kHz 的 CAN波特率:
TOSC = 50 ns,选择 BRP<5:0> = 04h,则 TQ = 500 ns。
欲达到 125 kHz,位时间应为 16 TQ。
位的采样时刻取决于系统参数,通常应发生在位时间的 60-70% 处。同时, TDELAY 典型值为 1-2 TQ。
同步段 = 1 TQ,传播段 = 2 TQ,这种情况下设置相位缓冲段 PS1 = 7 TQ,将会在跳变之后的 10 TQ 时进行采样。此时相位缓冲段 PS2 长度为 6 TQ。
由于相位缓冲段 PS2 长度为 6 TQ,根据规则, SJW 最大值为 4 TQ。然而通常状况下,只有当不同节点的时钟发生不够精确或不稳定(如采用陶瓷谐振器)时,才需要较大的 SJW。一般情况下,SJW 取值 1 TQ 即可满足要求。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)