Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
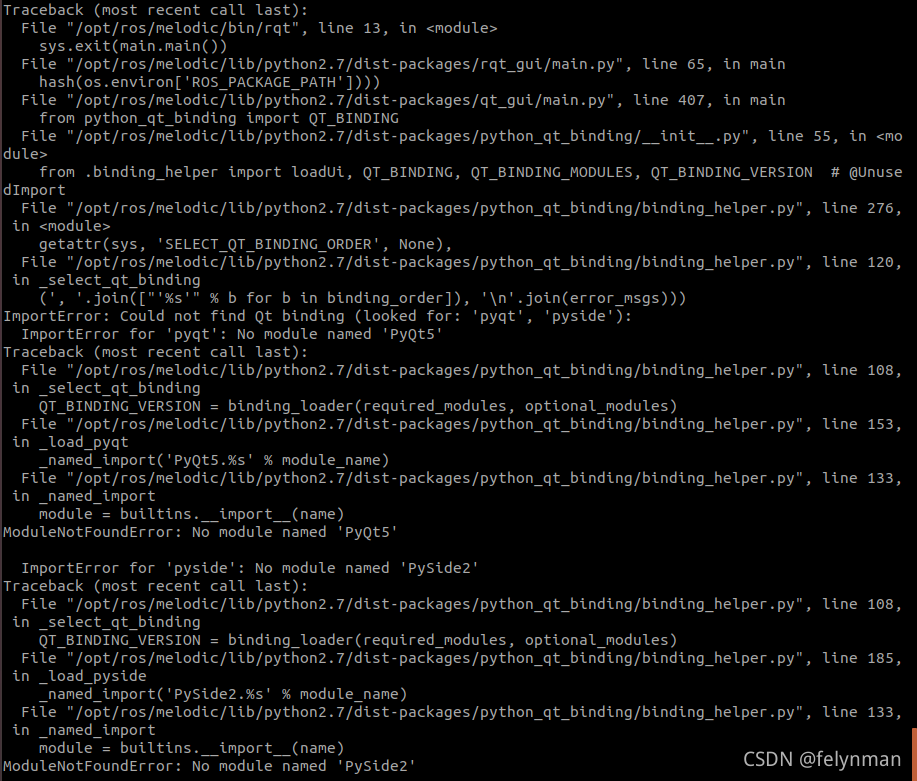
ROS下运行rqt报错
2023-05-16
解决方案:从上面可以看到ROS是通过python2.7编译,查看自己python版本,修改为对应版本即可成功运行rqt和rqt_graph。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
ROS
rqt
ROS下运行rqt报错 的相关文章
kinova-jaco2使用Moveit!控制真实机械臂抓取固定点物体
kinova jaco2使用Moveit 控制真实机械臂抓取固定点物体 一 机械臂坐标系 坐标系方向 位姿方向 轴的起始点 二 启动机械臂和Moveit 三 实现抓取 python代码 python文件建议直接用python启动 四 遇到的
Python 实现 Dijkstar 路径规划算法
Dijstar 最短路径算法 用于计算起始点到最终点的最短路径 一般采用的是贪心算法策略 原理可以参考 图解 Open list 和 close list 环境 Terminal 需要预先安装两个库 matplotlib 和 math pi
gazebo通过sdf搭建仿真环境和机器人Husky
具体格式要求可参考 http sdformat org spec ver 1 6 elem sdf
思岚RPLIDAR A2 在ubuntu 16.04上的测试
1 下载雷达ROS包 首先在github上下载rplidar的ros包 下载指令为 默认安装了git git clone https github com Slamtec rplidar ros git 在ubuntu上创建工作空间 并将该
Webots小车与Gampping建图仿真与ORB3算法实践
此篇博客转自本作者在古月居的博客 https www guyuehome com 34537 前言 在研一的时候 由于XXX项目的需要 其中一项就是需要测试Gmapping建图 自然也要求使用ROS系统 由于之前经常在webots中进行仿真
ros 中ERROR: cannot download default sources list from: https://raw.githubusercontent.com/ros/rosdist
ros 中ERROR cannot download default sources list from https raw githubusercontent com ros rosdistro master rosdep sources
关于相机与激光雷达数据采集与标定
最近在做一个关于车路协同的项目 需要做一个路侧系统 传感器有摄像头和激光雷达 相机和激光雷达联合标定费了老半天劲 在此记录一下 雷达时间戳不对 导致摄像头和雷达的数据无法对齐 解决办法 修改雷达驱动发布点云消息时的时间戳 相机内参标定可以使
Ubuntu16.04安装ROS Kinetic详细步骤
文章目录 ROS安装 配置Ubuntu软件仓库 设置sources list 设置密钥 更新Debian软件包索引 安装ROS 初始化 rosdep 环境配置 构建工厂依赖 测试安装 开发环境 ROS安装 ROS Kinetic只支持Wil
Ubuntu下vscode配置ROS环境
摘要 最近准备放弃用clion开发ROS使用更主流的vscode 整理一下在ubuntu18 04下的VSCode安装和ROS环境配置流程 安装 方法一 软件商店安装 个人还是推荐使用ubuntu软件下载vscode 简单不容易出错 方法二
ROS noetic tf demo错误处理及python版本切换
文章目录 报错描述及解决 ubuntu20 04下python版本切换 报错描述及解决 ubuntu版本 20 04 ROS版本 noetic roslaunch turtle tf turtle tf demo launch 报错信息 t
rosprofiler 安装和使用
rosprofiler wiki 页面 http wiki ros org rosprofiler rosprofiler package 下载rosprofiler和ros statistics msgs 放到工程目录下编译 https
ROS1 ROS2学习
ROS1 ROS2学习 安装 ROS ROS1 ROS2 命令行界面 ROS2 功能包相关指令 ROS 命令行工具 ROS1 CLI工具 ROS2 CLI工具 ROS 通信核心概念 节点 Node 节点相关的CLI 话题 Topic 编写发
roslaunch error: ERROR: cannot launch node of type
今天在因为github上有个之前的包更新了 重新git clone后出现了一个问题 ERROR cannot launch node of type crazyflie demo controller py can t locate nod
什么是 void `std::allocator`?即:`std::allocator
`
自动生成ROS 机器人操作系统 message C 头文件包含如下类型定义 typedef std msgs Header
错误状态:平台不允许不安全的 HTTP:http://0.0.0.0:9090
我正在尝试从我的 flutter 应用程序连接到 ws local host 9090 使用 rosbridge 运行 的 Ros WebSocket 服务 但我在 Flutter 中收到以下错误 错误状态 平台不允许不安全的 HTTP h
catkin_make后找不到ROS包
我根据 ROS 的 Wiki 页面创建了一个 ROS 工作区 我还使用创建了一个包catkin create pkg在我刚刚创建的工作区下 然后 按照 ROS Wiki 中的步骤使用以下命令构建包catkin make 构建包后 我插入命令
如何访问 Heroku 中的 docker 容器?
我已按照此处构建图像的说明进行操作 https devcenter heroku com articles container registry and runtime getting started https devcenter her
catkin_make 编译报错 Unable to find either executable ‘empy‘ or Python module ‘em‘...
文章目录 写在前面 一 问题描述 二 解决方法 参考链接 写在前面 自己的测试环境 Ubuntu20 04 一 问题描述 自己安装完 anaconda 后 再次执行 catkin make 遇到如下问题 CMake Error at opt
如何订阅“/scan”主题、修改消息并发布到新主题?
我想通过订阅message ranges来改进turtlebot3的LDS 01传感器 通过应用一些算法修改messange ranges并将其发布到新主题 如下所示 但是当我运行编码时出现错误 错误是 遇到溢出的情况 错误是 运行时警告
无法在 Ubuntu 20.04 上安装 ROS Melodic
我正在尝试使用这些命令在 Ubuntu 20 04 上安装 ROS Melodic sudo sh c echo deb http packages ros org ros ubuntu lsb release sc main gt etc
随机推荐
在Ubuntu 18.04上安装Apollo 6.0
文章目录 1 前期准备1 1 安装Ubuntu1 2 安装NVIDIA GPU驱动1 3 安装Docker Engine1 4 安装NVIDIA Container Toolkit 2 下载Apollo源文件3 启动Docker容器4 进入
R2LIVE安装与测试
文章目录 1 R2LIVE2 安装依赖2 1 Ubuntu和ROS2 2 Ceres Solver2 3 livox ros driver 3 编译R2LIVE4 运行示例 1 R2LIVE R2LIVE 是一个强大的 实时的 紧密耦合的多
图像标注工具labelme在WIndows系统上的安装和使用
1 前言 labelme可对图像进行标注 xff0c 包括多边形 xff0c 矩形 xff0c 线 xff0c 点和图像级标注 它是用Python编写的 xff0c 并使用Qt作为其图形界面 详细内容见 xff1a https github
Windows环境使用和编译CMake记录
以下为两种使用方式 xff0c 第一种较为简单 xff0c 第二种需提前安装vs软件 1 二进制方式安装 下载win平台的安装包 xff0c 安装解压后将bin目录添加到环境变量即可 打开命令窗口 xff0c 查看当前版本 百度云下载链接
激光雷达和相机的联合标定(Camera-LiDAR Calibration)之Autoware
1 前言 单一传感器不可避免的存在局限性 xff0c 为了提高系统的稳健性 xff0c 多采取多传感器融合的方案 xff0c 融合又包含不同传感器的时间同步和空间同步 这里要讲的激光雷达和相机的联合标定就属于空间同步范畴 另外 xff0c
如何使用Keras fit和fit_generator(动手教程)
写在前面 被Adrian Rosebrock圈粉后 xff0c 就一直期待他的更新 xff0c 作者每周一更新 xff0c 考虑到时差问题 xff08 作者在美国 xff09 xff0c 一般北京时间周二才能看到 作者根据读者留言中的问题写
CMake 的常用命令
目录 0 CMake常用的命令或函数 xff1a 1 定义项目 project 2 多个目录 add subdirectory 3 常用命令 add executable add library 4 常用命令 改变最终目标文件输出位置 5
Libcurl的编译_HTTP/HTTPS客户端源码示例
HTTP HTTPS客户端源码示例 环境 zlib 1 2 8 openssl 1 0 1g curl 7 36 Author Kagula LastUpdateDate 2016 05 09 阅读前提 xff1a CMake工具的基本使用
CNN卷积神经网络原理详解(上)
CNN卷积神经网络原理详解 xff08 上 xff09 前言卷积神经网络的生物背景我们要让计算机做什么 xff1f 卷积网络第一层全连接层训练 前言 卷积网络 xff08 convolutional network 也叫作卷积神经网络 xf
啥也不会照样看懂交叉熵损失函数
啥也不会照样看懂交叉熵损失函数 什么是损失函数损失函数的作用有哪些损失函数交叉熵 xff08 Cross Entroy 损失函数 什么是损失函数 损失函数 loss function 是用来估量模型的预测值与真实值的不一致程度 xff0c
可变形卷积从概念到实现过程
可变形卷积从概念到实现过程 什么是可变形卷积 xff1f 为什么要可变形卷积 xff1f 可变形卷积结构形式 xff1f 可变形卷积的学习过程 xff1f 可变形卷积如何实现 xff1f 上期回顾 卷积神经网络进阶用法 残差网络如何解决梯度
导航定位系统的原理解析(一个小白写给另一个小白)
导航定位系统的原理解析 xff08 写给小白 xff09 前言 三星 定位基本原理 xff08 导航定位的原理 xff09 传输误差后记 前言 无人驾驶是这几年大火的一个研究方向 xff0c 研究无人驾驶需要了解的知识非常多 xff0c 但
一张图详细说明自动驾驶车辆如何搭建硬件系统
一张图详细说明自动驾驶车辆如何搭建硬件系统 文章结构说明第一部分 xff08 1 xff09 一图展示自动驾驶硬件系统的总体架构 xff08 2 xff09 庖丁解牛说内容1 线控模块2传感器模块 第二部分 xff08 1 xff09 传感
Tensorflow安装教程详解(图文详解,深度好文)
Tensorflow安装教程详解 xff08 图文详解 xff0c 深度好文 xff09 前言安装前的准备工作关于python关于Anaconda 开始使用Tensorflow系统内配置Anaconda使用路径Anaconda Naviga
二级指针 *(unsigned char**)(buf+0) = (unsigned char*)(buf+1)
RTT里面的代码 1 rt err t rt mp init struct rt mempool mp 2 const char name 3 void start 4 rt size t size 5 rt size t block si
子类以private方式继承父类
子类以private方式继承父类 xff0c 则父类的pubic protected接口在子类变为private接口 xff0c 而父类的private接口在子类变为不可访问的接口 xff0c 而且不存在子类到父类的转换 所以子类以priv
CNN实战之如何分析影评-好看又有趣的讲解
CNN实战之如何分析影评 好看又有趣的讲解 前言认识影评数据集了解TextCNN模型获取影评数据生成文本数据集生成TextCNN模型评估模型 前言 话说老王买了两张电影票打算请女神小丽去看电影 xff0c 老王希望看完电影趁着热度可以和小丽
无人驾驶时代的室外组网技术研究
无人驾驶时代的室外组网技术研究 车载自组网车载自组网简介车载自组网特点车载自组网组成及建构 主流自组网通信方式ZigBeeWIFIBlue ToothWiMAXDSRC4G 5G 参考文献 车载自组网 车辆通信网络就是在汽车上装载移动通信设
这本关于机器学习的书---牛XXX
机器学习好书推荐 如图所示 xff0c 这是一本可读性非常强 xff0c 非常有趣的一本介绍机器学习概率论的书 xff0c 让人看了会上瘾 看到这里 xff0c 作者摊牌了 本书作者即本人
ROS下运行rqt报错
解决方案 xff1a 从上面可以看到ROS是通过python2 7编译 xff0c 查看自己python版本 xff0c 修改为对应版本即可成功运行rqt和rqt graph
热门标签
obr
kcfinder
androidsql
textsize
uniscribe
cfexecute
netuse
openmq
ngit
tform
ansiescape
dictmixin
popularity
devisejwt