理解网络中大端和小端往往是一道基础面试题 ,这里作为记录和整理,希望能帮到大家
目录
前言
一、字节序
二、什么小端顺序
三、什么大端顺序
四、处理器体系所属网络字节顺序
五、大小端转换
1、大端整形转换为小端
2、小端转换为小端
3、C# 字节转换接口
六、为什么有大小端之分
前言
在实际开发中,做过网络的小伙伴一定会碰到网络字节顺序(大端和小端)的问题,尤其unity游戏开发。因为对于C++和Java默认是大端开发,C#就非常另类,默认的网络的字节顺序是小端,这里就牵扯到大小端的转换问题。
一、字节序
字节顺序又称端序或尾序(Endianness),在计算机科学领域中,指电脑内存中或在数字通信链路中,组成多字节的字的字节的排列顺序。在几乎所有的机器上,多字节对象都被存储为连续的字节序列。
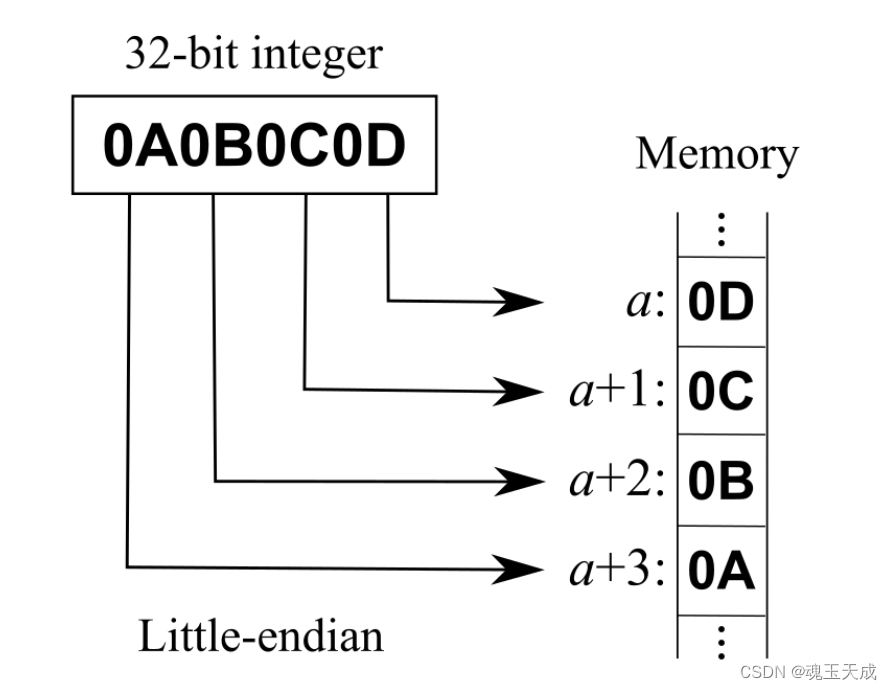
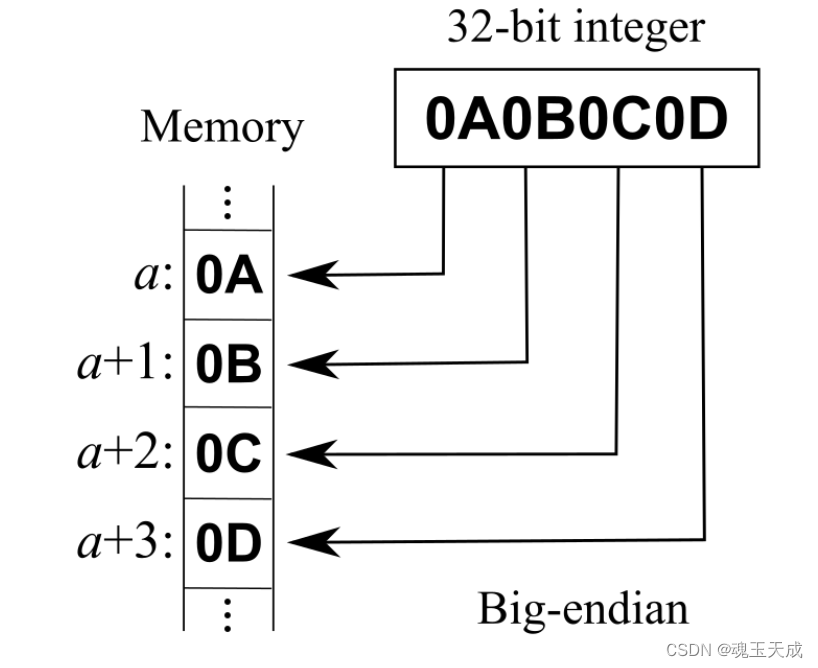
例如在 C 语言中,一个类型为 int 的变量 x 地址为 0x100,那么其对应地址表达式 &x 的值为 0x100,x 的四个字节将被存储在电脑内存的 0x100,0x101,0x102,0x103 位置。字节的排列方式常见的方式有两种:将一个多位数的低位放在较小的地址处,高位放在较大的地址处,则称小端序(Little-Endian);反之则称大端序(Big-Endian)。
为什么需要字节序这个规定,主要是因为在网络应用中字节序是一个必须被考虑的因素,对于不同 CPU 可能采用不同标准的字节序,所以均按照网络标准转化成相应的字节序。
二、什么小端顺序
Little-Endian:将低序字节存储在起始地址(低位编址),在变量指针转换的时候地址保持不变,比如 int64* 转到 int32*,对于机器计算来说更友好和自然。
三、什么大端顺序
Big-Endian:将高序字节存储在起始地址(高位编址),内存顺序和数字的书写顺序是一致的,对于人的直观思维比较容易理解,网络字节序统一规定采用 Big-Endian。
四、处理器体系所属网络字节顺序
网络字节顺序,通常和CPU的架构相关,不同的CPU网络字节顺序有可能不同。它们主要分为三类:
| CPU架构 | 字节顺序 |
| x86、MOS Technology 6502 、Z80、VAX、PDP-11 | 小端 |
| Motorola 6800、Motorola 68000、PowerPC 970、System/370、SPARC(除V9外) | 大端 |
| ARM、PowerPC(除PowerPC 970外)、DEC Alpha、SPARC V9、MIPS、PA-RISC及IA64 | 字节顺序配置 |
五、大小端转换
1、大端整形转换为小端
//int 大端转小端
int order2little(int be)
{
return ((be >> 24) &0xff )
| ((be >> 8) & 0xFF00)
| ((be << 8) & 0xFF0000)
| ((be << 24));
}
2、小端转换为小端
//int 小端转大端
int order2big(int le) {
return (le & 0xff) << 24
| (le & 0xff00) << 8
| (le & 0xff0000) >> 8
| (le >> 24) & 0xff;
}
3、C# 字节转换接口
//---------大小端整型转换
short i = 100;//小端100
short bigValue = System.Net.IPAddress.HostToNetworkOrder(i);//把i转成相应的大端字节数
short little = System.Net.IPAddress.NetworkToHostOrder(bigValue);//将bigValue转换为小端
//---------byte数组转换大端,data是小端数据
var orders= new byte[4];
Array.Copy(data, 0, orders, 0, 4);
orders= orders.Reverse().ToArray();
var n = BitConverter.ToInt32(orders, 0);
//---------字符串反转,大小端判断
int data = 439041118; // 十六进制为 1A2B3C5E
byte[] bData = BitConverter.GetBytes( data );
if (BitConverter.IsLittleEndian) // 若为 小端模式
{
Array.Reverse( bData ); // 转换为 大端模式
}
string s = BitConverter.ToString( bData );
六、为什么有大小端之分
1、网络协议指定的网络字节顺序是大端
2、不同的CPU架构有不同的网络字节顺序
3、不同语言默认网络字节顺序有小端之分
4、计算机电路先处理低位字节,效率比较高。因为计算就是从低位开始的,所以计算机内部很多
都是小端字节序。
5、而大端字节序更符合人类的思维习惯
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)