#使用TF实现海龟机器人跟随
昨天粗略地讲解了一会儿TF变换,用的是ROS系统中自带的功能包实现小海龟跟随的功能(具体见→初识TF变换)。今天我们将用自己编写节点的方式实现小海龟跟随的功能,并且,在之前的基础上,建立一个新的参考坐标系。
1、在工作空间的src目录下新建功能包
lzw08@ubuntu:~$ cd ros_ws/src
lzw08@ubuntu:~/ros_ws/src$ catkin_create_pkg turtle_follow std_msgs roscpp rospy tf geometry_msgs
说明:turtle_follow 为功能名称,std_msgs、roscpp、rospy、tf、geometry_msgs都是此功能包的依赖项。

2、进入功能包的src目录下新建.cpp文件
lzw08@ubuntu:~/ros_ws/src$ cd turtle_follow/src
1)turtle_broadcaster.cpp
lzw08@ubuntu:~/ros_ws/src/turtle_follow/src$ touch turtle_broadcaster.cpp
lzw08@ubuntu:~/ros_ws/src/turtle_follow/src$ gedit turtle_broadcaster.cpp
#include<ros/ros.h>
#include<tf/transform_broadcaster.h>
#include<turtlesim/Pose.h>
using namespace std;
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
static tf::TransformBroadcaster br;
tf::Transform transform;
transform.setOrigin(tf::Vector3(msg->x,msg->y,0.0));
tf::Quaternion q;
q.setRPY(0,0,msg->theta);
transform.setRotation(q);
br.sendTransform(tf::StampedTransform(transform,ros::Time::now(),"world",turtle_name));
}
int main(int argc,char** argv)
{
ros::init(argc, argv, "turtle_tf_listener");
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
}
turtle_name = argv[1];
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
ros::spin();
return 0;
}
2)turtle_listener.cpp
lzw08@ubuntu:~/ros_ws/src/turtle_follow/src$ touch turtle_listener.cpp
lzw08@ubuntu:~/ros_ws/src/turtle_follow/src$ gedit turtle_listener.cpp
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "turtle_tf_listener");
ros::NodeHandle node;
ros::service::waitForService("spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("turtle2/cmd_vel", 2);
tf::TransformListener listener;
ros::Rate rate(10.0);
while (node.ok()){
tf::StampedTransform transform;
try{
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);
}
catch (tf::TransformException &ex) {
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(), transform.getOrigin().x()); vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) + pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
}
3、修改编译规则CMakeList.txt
lzw08@ubuntu:~/ros_ws/src/turtle_follow/src$ cd ..
lzw08@ubuntu:~/ros_ws/src/turtle_follow$ gedit CMakeLists.txt

具体修改了138、139行和152~158行。以下供复制:
add_executable(turtle_broadcaster src/turtle_broadcaster.cpp)
add_executable(turtle_listener src/turtle_listener.cpp)
target_link_libraries(turtle_broadcaster
${catkin_LIBRARIES}
)
target_link_libraries(turtle_listener
${catkin_LIBRARIES}
)
4、回到工作空间下编译
lzw08@ubuntu:~/ros_ws/src/turtle_follow$ cd ~/ros_ws
lzw08@ubuntu:~/ros_ws$ catkin_make

编译通过后我们不再通过打开一个终端运行主节点、打开一个终端运行turtle_broadcaster节点、打开一个新终端运行turtle_listener节点的方式运行,换另外一种高级些的(见步骤5)。
5、新建.launch 文件
刚才编译的时候我们回到了工作空间,现在得重新进入turtle_follow功能包。
lzw08@ubuntu:~/ros_ws$ cd src/turtle_follow/
新建launch目录用以存放.launch文件
lzw08@ubuntu:~/ros_ws/src/turtle_follow$ mkdir launch
lzw08@ubuntu:~/ros_ws/src/turtle_follow$ cd launch/
lzw08@ubuntu:~/ros_ws/src/turtle_follow/launch$ touch follow.launch
lzw08@ubuntu:~/ros_ws/src/turtle_follow/launch$ gedit follow.launch
在follow.launch文件中粘贴以下代码:
<launch>
<!-- 海⻳仿真器 -->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<!-- 键盘控制 -->
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<!-- 两只海⻳的tf⼴播 -->
<node pkg="turtle_follow" type="turtle_broadcaster" args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="turtle_follow" type="turtle_broadcaster" args="/turtle2" name="turtle2_tf_broadcaster" />
<!-- 监听tf⼴播,并且控制turtle2移动 -->
<node pkg="turtle_follow" type="turtle_listener" name="listener" />
</launch>
保存并关闭即可,不需要编译!
6、运行follow.launch 文件
回到工作空间下source一下,就可以运行了
lzw08@ubuntu:~/ros_ws/src/turtle_follow/launch$ cd ~/ros_ws
lzw08@ubuntu:~/ros_ws$ source devel/setup.bash
lzw08@ubuntu:~/ros_ws$ roslaunch turtle_follow follow.launch

可见,运行效果跟昨天初识TF变换那里是一样的,所不同的就是,昨天那个是系统自带的,今天这个是新建节点实现的,到这里今天的任务就实现一半了。
7、新建参考坐标系carrot1
lzw08@ubuntu:~/ros_ws$ cd src/turtle_follow/src/
lzw08@ubuntu:~/ros_ws/src/turtle_follow/src$ touch turtle_tf.cpp
lzw08@ubuntu:~/ros_ws/src/turtle_follow/src$ gedit turtle_tf.cpp
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <math.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "turtle_tf_listener");
ros::NodeHandle node;
tf::TransformBroadcaster br;
tf::Transform transform;
ros::Rate rate(10.0);
while (node.ok())
{
transform.setOrigin( tf::Vector3(2.0, 2.0 , 0.0) );
transform.setRotation( tf::Quaternion(0, 0, 0, 1) );
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "turtle1", "carrot1"));
rate.sleep();
}
return 0;
}
8、修改编译规则CMakeList.txt及follow.launch 文件等
1)CMakeList.txt
lzw08@ubuntu:~/ros_ws/src/turtle_follow/src$ cd ..
lzw08@ubuntu:~/ros_ws/src/turtle_follow$ gedit CMakeLists.txt
今天写了三个.cpp文件所以要有三个add_executable和三个target_link_libraries:

add_executable(turtle_tf src/turtle_tf.cpp)
target_link_libraries(turtle_tf
${catkin_LIBRARIES}
)
2)follow.launch
lzw08@ubuntu:~/ros_ws/src/turtle_follow$ cd launch/
lzw08@ubuntu:~/ros_ws/src/turtle_follow/launch$ gedit follow.launch
把下面这句代码加进去就行了:
<node pkg="turtle_follow" type="turtle_tf" name="broadcaster_frame" />
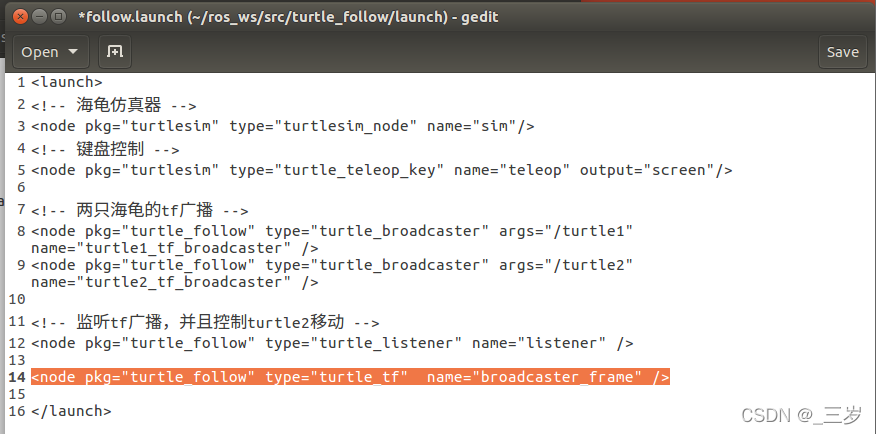
放置的位置如上图所示 ↑
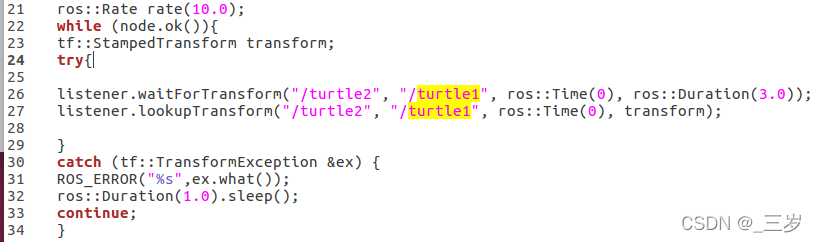
3)turtle_listener.cpp
如下图所示,将第26、27行的“turtle1”都改成“carrot1”,然后保存关闭即可。(不要纠结为什么你的turtle1和carrot1没有颜色!高亮只是方便你们看清并修改)
修改前:
修改后:

9、回到工作空间下编译
lzw08@ubuntu:~/ros_ws/src/turtle_follow/launch$ cd ~/ros_ws
lzw08@ubuntu:~/ros_ws$ catkin_make

像这样编译通过就可以运行了。
10、运行
lzw08@ubuntu:~/ros_ws$ roslaunch turtle_follow follow.launch

因为有了参考坐标系的存在,第二只小海龟不再与第一只小海龟重合了,它们之间有一点的距离,不过还是跟随的。
11、rviz

12、总结
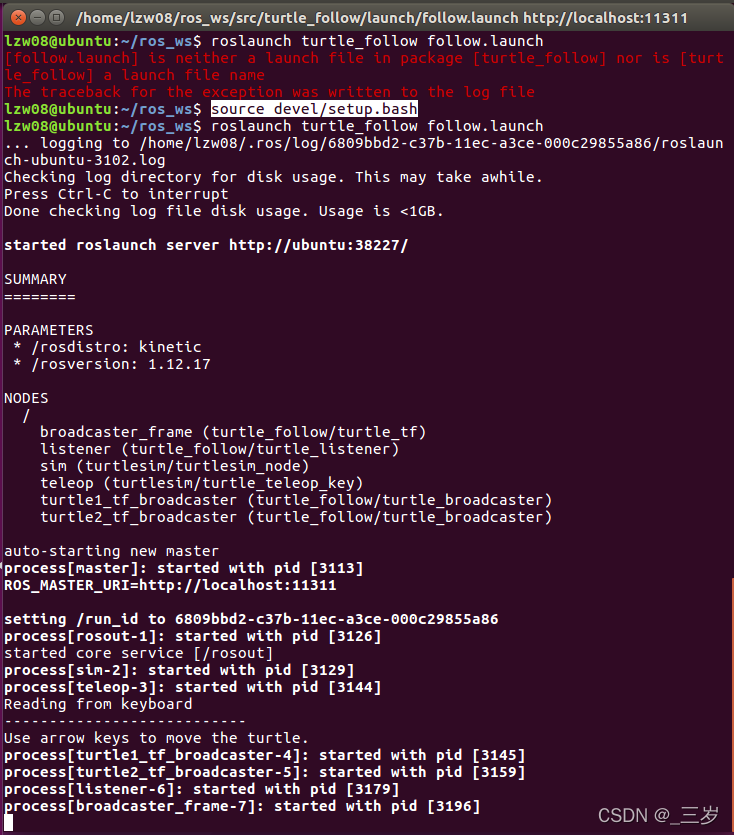
如果出现下图所示错误:

运行下面这句代码就可以解决了:
source devel/setup.bash
到这就算所有工作都做完了,对于实践四报告该如何写,我觉得老师给的模板顺序可能有点不太好,所以我浅改一下:
1、创建使小海龟移动跟随目标的功能包。
2、新建 tf 广播*.cpp
3、创建监听*.cpp
4、修改CMakeLists.txt文件内容
5、修改package.xml文件内容
6、建立固定参考系*.cpp
7、修改CMakeLists.txt文件内容
8、在功能包下创建并编写 launch 文件
9、运行程序进行测试
10、图形化工具查看节点、话题等信息
附本人实践报告 → 机器人操作系统(ROS)实践四(仅供参考,请勿他用)
理解了就会写了,下期见啦 ~
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)