本节讲解
如何使用OpenMV通过串口来发送数据
OpenMV 是可以直接通过串口发送字符串的。
为什么要用串口呢?因为要时候需要把信息传给其他MCU(单片机),串口简单,通用,基本每一个MCU都会有串口。
TTL串口至少需要3根线:TXD,RXD,GND。TXD是发送端,RXD是接收端,GND是地线。 连线的时候,需要把OpenMV的RXD连到另一个MCU的TXD,TXD连到RXD,GND与GND相连。图示:
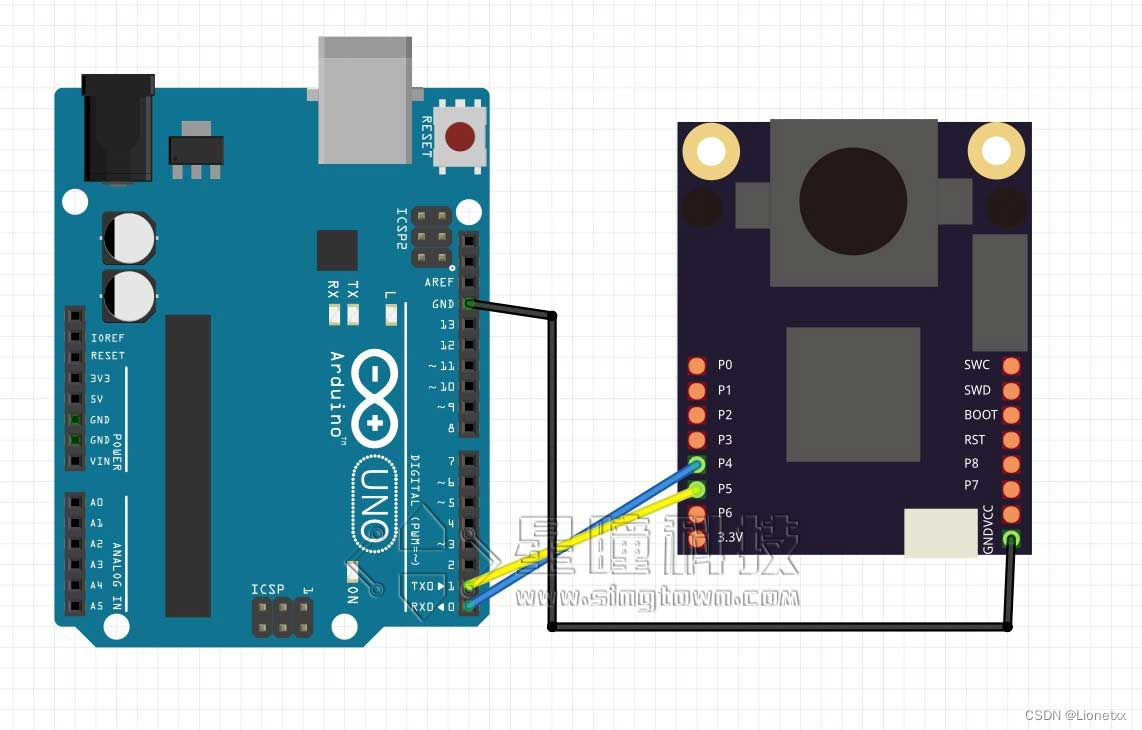
基本上所有单片机都有串口,因此我们可以使用OpenMV的串口来给任何其他的单片机或者是设备来传输信息
如果我们需要查看OpenMV上串口的信息,我们需要额外的设备(示波器或USB转串口模块)
OpenMV有一个扩展板——>串口调试扩展板,它可以直接通过这个USB把数据传到电脑上
产品

打开详细页面,里面有个星瞳串口助手的软件,我们需要下载下来,只有安装了这个软件才能查看上面的数据
我们把OpenMV连接上扩展板,并且串口的USB数据线要连接到电脑上,OpenMV的数据线也要连接到电脑上
Hello World
运行串口例子
import time
from pyb import UART
uart = UART(3, 19200, timeout_char=1000)
while(True):
uart.write("Hello World!\r")
time.sleep_ms(1000)
或者
from pyb import UART
uart = UART(3, 9600)
string = "hello string!"
uart.write(string)
打开星瞳串口助手,选择串口,注意此时的波特率要和代码中的一致
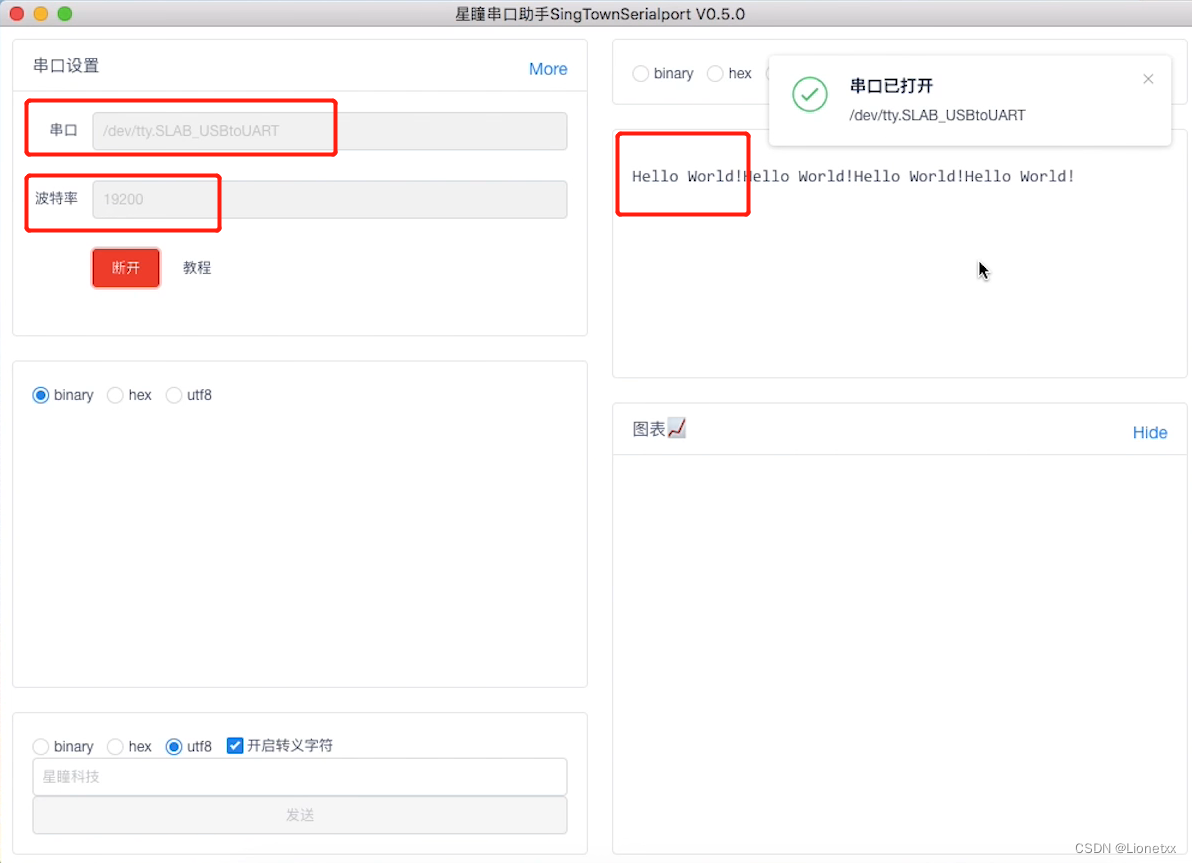
每当有数据传入,OpenMV上的灯就会闪一下
简单的数据发送
但是有时候不想传输一大堆的数据。比如:我只想传输面积最大的色块的x,y中心坐标。
想传输什么数据,就构造一个什么数据。
写一个for循环,再写一个find_max()函数。
以寻找最大色块为例,返回最大色块的中心cx(),cy()
import sensor, image, time
from pyb import UART
import json
yellow_threshold = (65, 100, -10, 6, 24, 51)
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(10)
sensor.set_auto_whitebal(False)
clock = time.clock()
uart = UART(3, 115200)
def find_max(blobs):
max_size=0
for blob in blobs:
if blob.pixels() > max_size:
max_blob=blob
max_size = blob.pixels()
return max_blob
while(True):
img = sensor.snapshot()
blobs = img.find_blobs([yellow_threshold])
if blobs:
max_blob=find_max(blobs)
print('sum :', len(blobs))
img.draw_rectangle(max_blob.rect())
img.draw_cross(max_blob.cx(), max_blob.cy())
output_str="[%d,%d]" % (max_blob.cx(),max_blob.cy())
print('you send:',output_str)
uart.write(output_str+'\r\n')
else:
print('not found!')
结果:sum表示视野中的小球,you send的内容则是最大小球的cx,cy
sum : 6
you send: [63,45]
sum : 2
you send: [60,50]
sum : 1
you send: [61,51]
Arduino代码
void setup() {
Serial.begin(115200);
Serial.println("来点代码");
}
void loop() {
if(Serial.available())
{
char data = Serial.read() ;
Serial.print(data);
if(Serial.read()==',')
Serial.print(',');
if(Serial.read()==']')
Serial.println();
}
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)