文章目录
- 0 准备
- 1 C++调用动态链接库
- 2 Java调用C++动态链接库
- 3 运行
0 准备
在CMake中,使用如下的方法把代码编译成动态/静态链接库:
project(getMatInfo)
set(CMAKE_CXX_STANDARD 11)
add_library(getMatInfo SHARED
getMatInfo.h
getMatInfo.cpp)
各个平台的动态或静态链接库的格式,mac环境下的都是.dylib,在linux上为.so/.a文件,在windows上为.dll/.lib

注意在编译之前,需要在头文件中声明后面动态链接库函数中需要被调用的函数。例如,如下就是getMatInfo.h头文件中的内容:
#ifndef GETMATINFO_GETMATINFO_H
#define GETMATINFO_GETMATINFO_H
extern "C"{
void getMatInfo(const char* path, const char* variableName,int& row, int& col);
};
#endif
1 C++调用动态链接库
调用方法如下:
- 1,把头文件
getMatInfo.h放在和调用函数的同级目录下; - 2,在
CMakeLists.txt中添加动态链接库的路径LINK_LIBRARIES("/Users/mac/CLionProjects/testlib/libgetMatInfo.dylib")【根据自己的情况做具体修改】; - 3,像正常调用方法一样调用动态链接库中的方法,例如下面的代码;
#include <iostream>
#include "getMatInfo.h"
int main() {
const char *path = "/Users/mac/CLionProjects/getMatInfo/ranking.mat";
const char* variableName = "Data";
int n = 0;
int m = 0;
getMatInfo(path, variableName, n, m);
std::cout << n << " " << m;
}
2 Java调用C++动态链接库
常见Java调用C++的代码方法有jni、jna、JNative。jni需要先编写Java代码,然后转换成C++代码,被调用的C++代码再去实现Java转转后的C++方法。虽然效率最高,但是比较麻烦。
这里使用是jna调用C++中的方法,原因就是不用改写C++的代码,相对简单一些。不过这个需要被调用的C++方法,改写对应的的数据结构,以便Java调用。
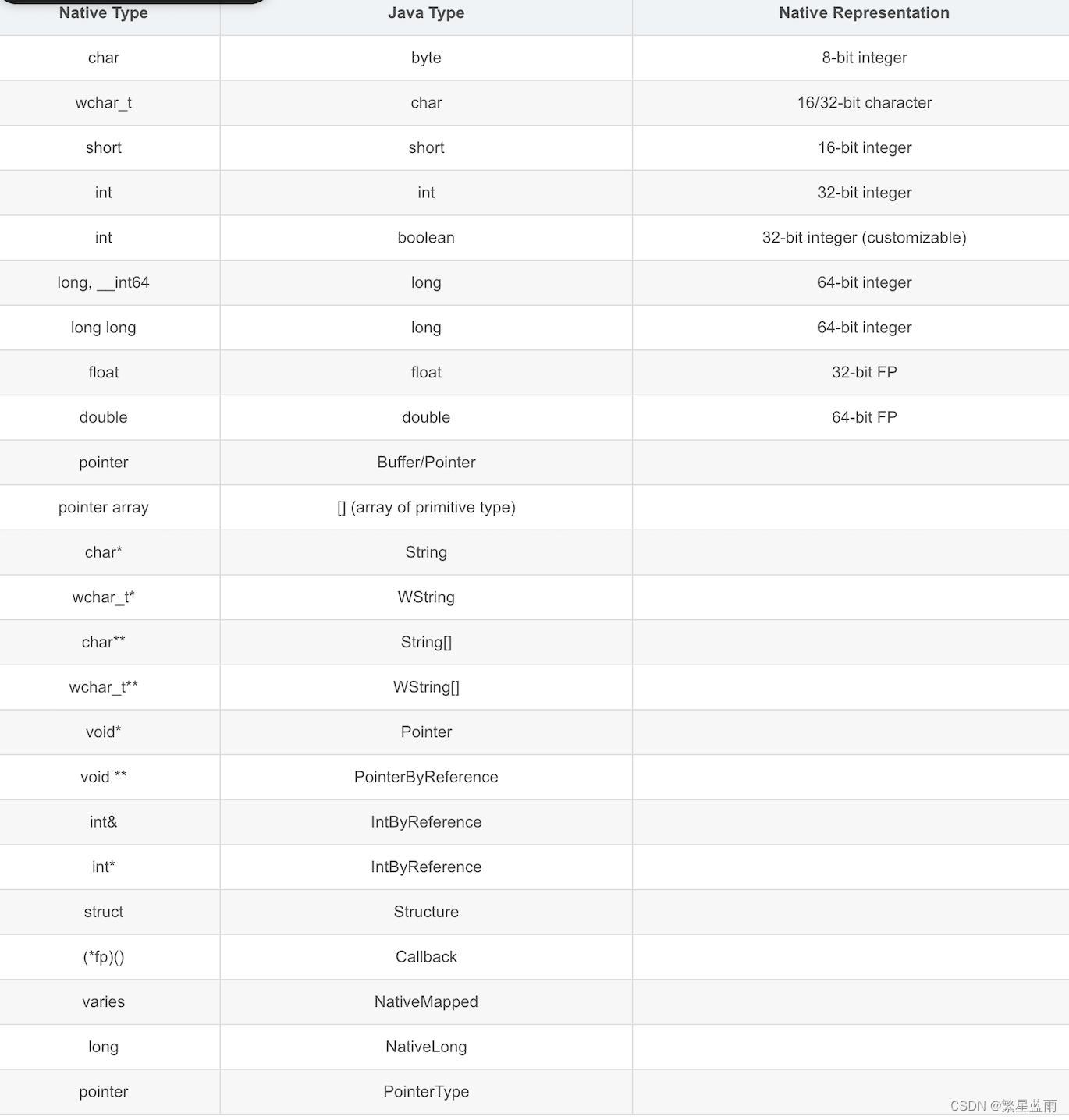
常见的数据结构映射如下:
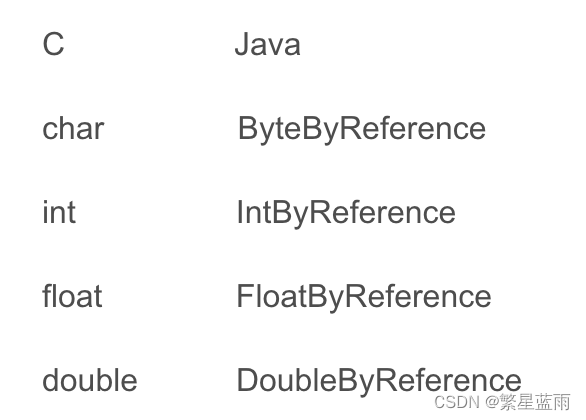
指针对应的映射:
这里使用的库为:
import com.sun.jna.Library;
import com.sun.jna.Native;
import com.sun.jna.Platform;
在IDEA中导入库的方法如下:



首先,继承Library,然后定义载入动态链接库的变量,声明调用的接口:
package com.jk.jnaTest;
import com.sun.jna.Library;
import com.sun.jna.Native;
import com.sun.jna.Platform;
public interface JnaDll extends Library {
JnaDll jnadll = (JnaDll) Native.load("/Users/mac/Downloads/springCloud/testLib/src/com/jk/jnaTest/libgetMatInfo.dylib", JnaDll.class);
void getMatInfo(String path, String varName,IntByReference row, IntByReference col);
}
调用动态链接库的方法:
package com.jk.jnaTest;
public class JnaTest {
public static void main(String[] args){
IntByReference row = new IntByReference();
IntByReference col = new IntByReference();
String matPath = "/Users/mac/Downloads/springCloud/testLib/src/com/jk/jnaTest/Fig.mat";
String varName = "FigData";
JnaDll.jnadll.getMatInfo(matPath, varName,row, col);
System.out.println(row.getValue());
System.out.println(col.getValue());
System.out.println("testJna");
}
}
3 运行
如果是在Linux下,不实用开发集成环境,直接使用JDK自带的指令进行编译和运行。
编译(两个jna的包的路径需要存在):
javac -cp .:/code/testLib/src/com/jk/jnaTest/jna-5.11.0.jar:/code/testLib/src/com/jk/jnaTest/jna-platform-5.11.0.jar -d . /code/testLib/src/com/jk/jnaTest/*.java
运行(进入到/code/testLib/src/com/jk/jnaTest/路径中):
java -cp .:/code/testLib/src/com/jk/jnaTest/jna-5.11.0.jar:/code/testLib/src/com/jk/jnaTest/jna-platform-5.11.0.jar com.jk.jnaTest.JnaTest
如果是使用编译器,那么需要打包成jar包,然后放到Linux服务器上进行执行:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)