‘’工欲善其事必先利其器‘’我们先从能够获取RGBD数据的相机开始谈起。首先我们来看一看其分类。
一、根据其工作原理主要分为三类:
1. 双目方案:
(1) 原理:
http://blog.csdn.net/shenziheng1/article/details/52883536
(2)产品:
ZED:https://www.stereolabs.com/
Tango:http://www.androidcentral.com/tango/home
2. 结构光方案
(1) 原理:
http://blog.sina.com.cn/s/blog_6ca5ea9f0101dt9j.html
(2)产品:
微软Kinectv1:https://www.microsoft.com/enus/download/details.aspx?id=28782
http://www.k4w.cn/news/8.html
华硕xtion:
https://www.asus.com/3D-Sensor/Xtion_PRO/
3. TOF方案:
(1) 原理:
http://www.cnblogs.com/freshmen/p/4818196.html
http://www.cnblogs.com/freshmen/p/5041197.html
(2)产品:
微软Kinectv2:
https://www.microsoft.com/en-us/download/details.aspx?id=44561
http://www.k4w.cn/news/1.html
开发博客:http://blog.csdn.net/jiaojialulu/article/details/53087988
英特尔RealSense系列:
https://software.intel.com/zh-cn/realsense/get-started?language=fr
HEPTAGON:http://hptg.com/
PMD:http://www.pmdtec.com/
二、关键技术参数:
1.检测范围;2.检测精度;3.检测角度;4.帧率;5.模块大小;6.功耗
目前的主流摄像头在检测范围、检测精度和检测角度等都相差不大,主要区别在于:
1、结构光方案优势在于技术成熟,深度图像分辨率可以做得比较高,但容易受光照影响,室外环境基本不能使用;
2、TOF方案抗干扰性能好,视角更宽,不足是深度图像分辨率较低,做一些简单避障和视觉导航可以用,不适合高精度场合。受环境影响小,传感器芯片并不成熟,成本很高,实现量产困难。
3、双目方案,成本相对前面两种方案最低,但是深度信息依赖纯软件算法得出,此算法复杂度高,难度很大,处理芯片需要很高的计算性能,同时它也继承了普通RGB摄像头的缺点:在昏暗环境下以及特征不明显的情况下并不适用。
三种方案对比:
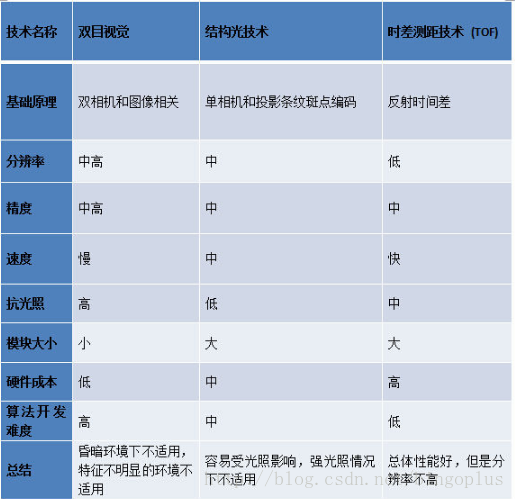
三、总结:
1.双目方案:最大的问题在于实现算法需要很高的计算资源,导致实时性很差,而且基本跟分辨率,检测精度挂钩。也就是说,分辨率越高,要求精度越高,则计算越复杂,同时,纯双目方案受光照,物体纹理性质影响。
2.结构光方案:目的就是为了解决双目中匹配算法的复杂度和鲁棒性问题而提出,该方案解决了大多数环境下双目的上述问题。但是,在强光下,结构光核心技术激光散斑会被淹没。因此,不合适室外。同时,在长时间监控方面,激光发射设备容易坏,重新换设备后,需要重新标定。
3.TOF方案:传感器技术不是很成熟,因此,分辨率较低,成本高,但由于其原理与另外两种完全不同,实时性高,不需要额外增加计算资源,几乎无算法开发工作量,是未来。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)