STM32F401CDU6库函数工程文件搭建
根据下图的结构进行复制粘贴操作,代码部分在本文末有贴出来,STM32F4xx-DSP-StdPeriph-Lib-V1.8.0文件下载(使用part1即可)

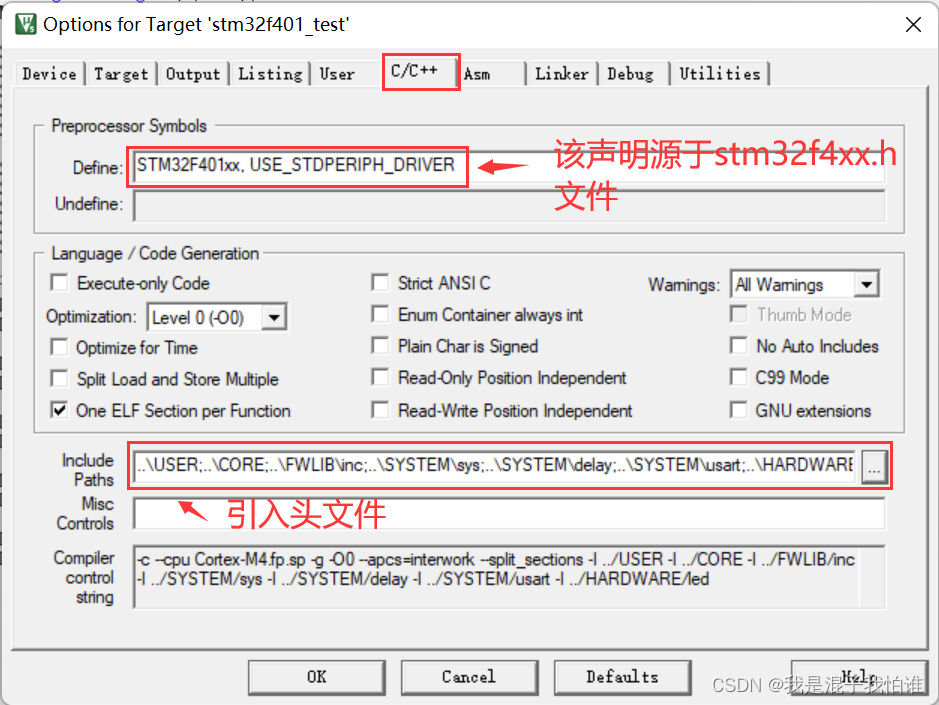
完成以上操作后,将Output与Listing生成的文件置于OBJ文件夹中,然后修改以下内容即可(剩下的就根据需求往里面添加内容即可):
以下部分为图片中的源码部分,可直接复制粘贴:
#include "sys.h"
#if 1
#pragma import(__use_no_semihosting)
struct __FILE {
int handle;
};
FILE __stdout;
void _sys_exit(int x) {
x = x;
}
int fputc(int ch, FILE *f) {
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
USART_SendData(USART1, (u8)ch);
return ch;
}
#endif
#ifndef __SYS_H
#define __SYS_H
#include "stm32f4xx.h"
#include "stdio.h"
#define BITBAND(addr, bitnum) ((addr & 0xF0000000) + 0x2000000 + ((addr & 0xFFFFF) << 5) + (bitnum << 2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
#define GPIOA_ODR_Addr (GPIOA_BASE + 20)
#define GPIOB_ODR_Addr (GPIOB_BASE + 20)
#define GPIOC_ODR_Addr (GPIOC_BASE + 20)
#define GPIOD_ODR_Addr (GPIOD_BASE + 20)
#define GPIOE_ODR_Addr (GPIOE_BASE + 20)
#define GPIOA_IDR_Addr (GPIOA_BASE + 16)
#define GPIOB_IDR_Addr (GPIOB_BASE + 16)
#define GPIOC_IDR_Addr (GPIOC_BASE + 16)
#define GPIOD_IDR_Addr (GPIOD_BASE + 16)
#define GPIOE_IDR_Addr (GPIOE_BASE + 16)
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr, n)
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr, n)
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr, n)
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr, n)
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr, n)
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr, n)
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr, n)
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr, n)
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr, n)
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr, n)
#endif
时延采用的 Systick 定时器,代码详解可参考文章 《STM32入门:Systick(嘀嗒定时器)学习》
#include "delay.h"
static u32 fac_us = 0;
static u32 fac_ms = 0;
void delay_init() {
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
fac_us = SystemCoreClock / 8000000;
fac_ms = fac_us * 1000;
}
void delay_us(u32 nus) {
u32 temp;
SysTick -> LOAD = nus * fac_us;
SysTick -> VAL = 0x00;
SysTick -> CTRL |= SysTick_CTRL_ENABLE_Msk;
do{
temp = SysTick -> CTRL;
}while(temp & 0x01 && !(temp & (1 << 16)));
SysTick -> CTRL &= ~SysTick_CTRL_ENABLE_Msk;
SysTick -> VAL = 0x00;
}
void delay_ms_limited(u32 nms) {
u32 temp;
SysTick -> LOAD = nms * fac_ms;
SysTick -> VAL = 0x00;
SysTick -> CTRL |= SysTick_CTRL_ENABLE_Msk;
do{
temp = SysTick -> CTRL;
}while(temp & 0x01 && !(temp & (1 << 16)));
SysTick -> CTRL &= ~SysTick_CTRL_ENABLE_Msk;
SysTick -> VAL = 0x00;
}
void delay_ms(u32 nms) {
u16 repeat = nms / 500;
u16 remain = nms % 500;
while(repeat) {
delay_ms_limited(500);
repeat --;
}
if(remain){
delay_ms_limited(remain);
}
}
#ifndef __DELAY_H
#define __DELAY_H
#include "sys.h"
void delay_init(void);
void delay_us(u32 nus);
void delay_ms(u32 mus);
#endif
学习分享,一起成长!以上为小编的总结分享,若存在不当之处,请批评指正!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)