fastplanner2
- 摘要
- 相关工作
-
- 路径制导轨迹优化
-
- 拓扑路径搜索
- A. 拓扑等价关系
- B. 拓扑路径图
- C. 路径缩短和修剪
- 实时拓扑路径规划
这篇论文是港科大开源的无人机运动规划fast planner的第二版,这里写下我对这篇工作的理解。
摘要
基于梯度的方法(GTO)容易陷入局部最优,本文就是提出一个新的基于GTO的方法来解决这个问题。
相关工作
基于梯度的路径优化
GTO是一种主要的路径生成算法,把路径生成看作一个最小化目标函数的非线性优化问题。
拓扑路径规划
用拓扑路径来进行规划
路径制导轨迹优化
A. 优化失效分析
GTO规划的失败和不好的初始路径有关。如下图所示,在欧式符号距离场(ESDF)中,梯度会拉动路径让它离开障碍物,但是如果路径穿越“山脊”或者“山谷”,梯度会是两个完全相反的方向,让路径规划出现问题。
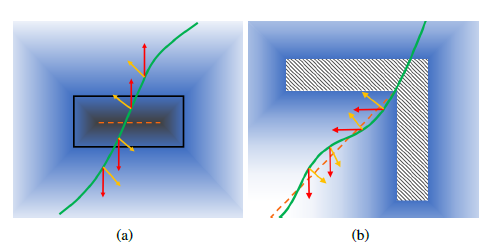
对于这种情况,仅仅靠ESDF的梯度并不够,需要额外的信息。
B. 问题公式化
文中提出的PGO方法是对上面GTO的改进,它把路径用B样条来表示。对于PGO方法,分为两步,第一个阶段产生一个过渡的预热轨迹(warmup trajectory),然后对这个warmup trajectory的平滑度和净空度再进行优化。两个阶段如下图:
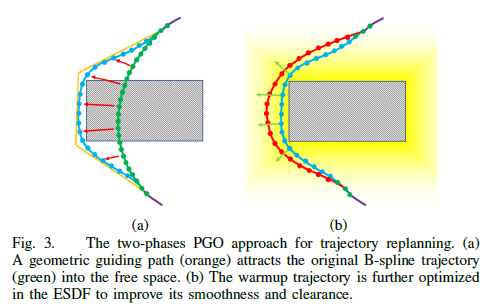
a图的绿色是初始B样条轨迹,橙色的是几何引导路径,几何引导路径把初始轨迹拉到没有碰撞的地方形成warmup 路径(蓝色),然后b图中,对warmup路径再进一步进行平滑度和净空度的优化,得到红色最终轨迹。这个几何引导路径通过A或者RRT等传统方法就可以得到,本文用的是采样的方法得到这条引导路径。
第一阶段的目标函数是:

这里
f
s
f_s
fs是平滑度的约束,具体在第一版的fast planner里有描述:

f
g
f_g
fg是引导路径和B样条路径之间的距离的惩罚函数:
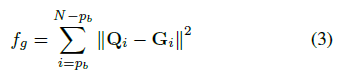
这里的
Q
i
Q_i
Qi是B样条的控制点,
G
i
G_i
Gi是几何引导路径(就是上面图蓝色线)上对应的点,通过均匀采样得到。这个时候的路径周围的梯度变化都比较平滑,就可以用标准的GTO算法来优化轨迹了。
第二阶段是用B样条曲线对warmup的路径进一步优化,来得到一个安全、平滑、动态可行的路径,这个阶段的目标函数是:
f
c
f_c
fc是碰撞约束,和障碍物近的时候就变得很大。
f
a
f_a
fa和
f
v
f_v
fv分别是对加速度和速度的惩罚,细节都在第一版fast planner的paper里。
拓扑路径搜索
上面讲了用一个几何引导路径得到了一条相对最优的路径,但是这条路径可能并不是最好的。本文提出了一个采样的方法来寻找几条不同的路径来引导上面PGO。
A. 拓扑等价关系
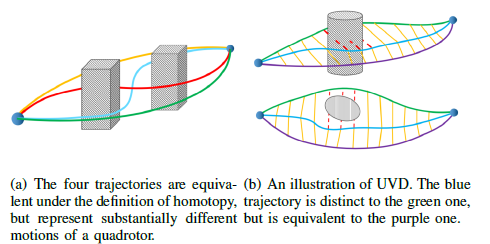
这部分主要是关于路径的等效性,以前的VD算法计算复杂度太大,文章提出了一个均一可视变形方法(UVD)来有效地捕获大量有用的路径,对于路径等效性的检查非常高效。UVD算法流程:
这里路径等效性的定义就是:对于两条路径,如果起点和终点相同,而且两条路径上对应的采样点,譬如采样点对
Q
i
Q_i
Qi和
G
i
G_i
Gi,每个采样点对之间的连线都没有碰撞,那么这两条路径就等价。譬如下图:
B. 拓扑路径图
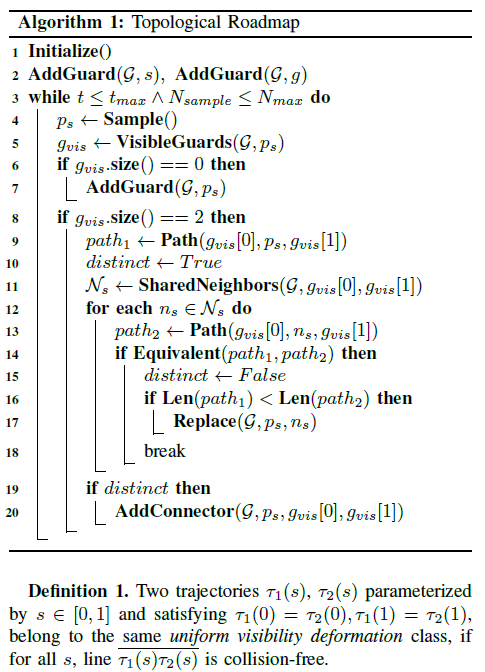
这节是引入两种点来构造一个UVD地图,分别叫做guard和connector,guard用来探索新的区域。开始的时候,在起点
s
s
s和终点
g
g
g分别构建两个guard点。connector点用来连接两个guard点形成一条路径,或者取代原来的connector点来形成一条更短的路径。整个算法被限制在
t
m
a
x
t_{max}
tmax的执行时间内和
N
m
a
x
N_{max}
Nmax采样次数内。在生成UVD地图后,采用深度优先算法来寻找
s
s
s和
g
g
g之间的路径。具体如下图所示:
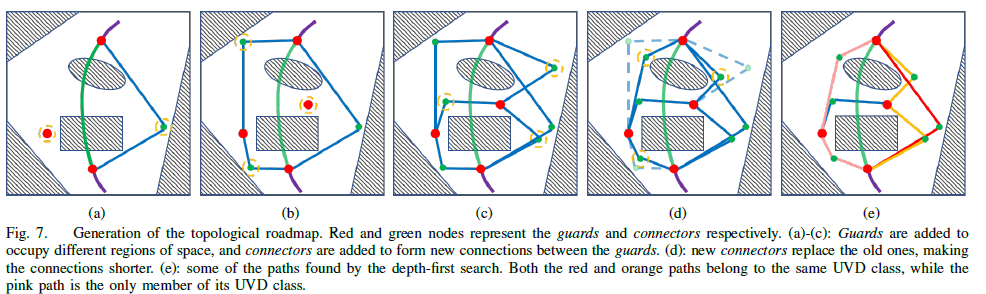
任何两个guard节点之间是看不到的,也就是它们的连线是碰撞的。每次在地图上采样一个点,如果这个点另外的任何一个guard都看不到,那么这个点就记作一个新的guard点。然后继续采样,如果一个采样点刚好可以被两个guard点看到,那么就把这个点记作connector,然后把这个connector和这两个guard点连起来。连接好以后做两个事:如果这是一条全新的拓扑路径,那么就保留,否则判断两条拓扑路径的长度,把长的那条去掉。
C. 路径缩短和修剪
像下面这个图所示:

通过算法1找到的部分路径很曲折,譬如橙色的那条路径,这节的内容就是让路径更平滑,也就是为上面Alg.1算法找到的所有拓扑路径
P
r
P_r
Pr找到一条拓扑相等的捷径
P
s
P_s
Ps来替代。具体如下图:
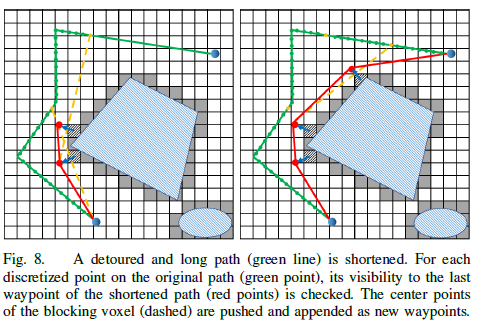
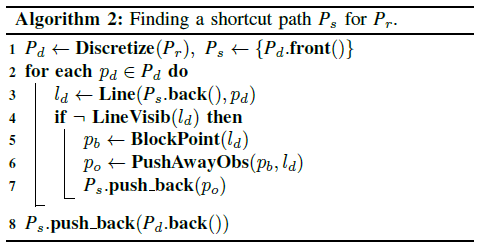
整个流程是:先把Alg.1找到的路径
P
r
P_r
Pr拆分成几个离散的的点
P
d
P_d
Pd,每次循环中,如果
P
d
P_d
Pd里的点
p
d
p_d
pd和
P
s
P_s
Ps里的最后一个点之间看不到,然后就找到那个阻挡视线的占据体素,把它往外推,然后加到
P
s
P_s
Ps点集合里去。这个循环一直进行直到最后一个点。这个算法具体如下所示:
实时拓扑路径规划
第4节中的算法输出了一组有效的路径,可以指导轨迹优化。我们将它们与PGO进行适当的集成,以便实时重新规划。如果检查到碰撞就调用一次拓扑路径地图重建的算法,之后就是缩短路径和剪枝,再之后每条拓扑路径调用PGO算法优化一遍。
值得注意的是,UVD类路径的等效路径会随着障碍物的增加呈指数增长。所以我们每次只选几条路径,譬如
K
m
a
x
K_{max}
Kmax条,然后对于长度大于最短路径
r
m
a
x
r_{max}
rmax倍的路径我们也会丢弃掉。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)