<Linux开发> linux应用开发-之-can通信开发例程
一、简介
对于Can通信的相关介绍,读作不过多介绍了,网上其它网友的介绍有很多。
二、环境搭建
本次测试can通信的应用例程是运行在ubuntu pc上的;当然也是可以运行在linux开发板 或相关linux设备上的。
在ubuntu pc上安装虚拟can,命令如下:
1.sudo modprobe vcan
加载虚拟can模块
2.sudo ip link add dev can0 type vcan
添加can0网卡
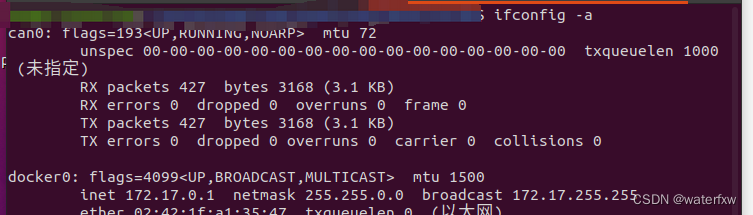
3.ifconfig -a
查看can0
4.sudo ip link set dev can0 up
开启can0
5.sudo ip link set dev can0 down
关闭can0
6. sudo ip link del dev can0
删除can0
对于我们要使用虚拟Can,运行1~4步即可;当测试完Can通信,不使用时可使用 5~6删除。
启动后查看如下:
三、例程代码
本次代码会使用主进程发送数据,子进程接收数据;详细代码如下:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include <net/if.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <errno.h>
void procc(void)
{
struct ifreq ifr = {0};
struct sockaddr_can can_addr = {0};
struct can_frame frame = {0};
int sockfd = -1;
int i;
int ret;
sockfd = socket(PF_CAN, SOCK_RAW, CAN_RAW);
if(0 > sockfd) {
perror("socket error");
exit(EXIT_FAILURE);
}
strcpy(ifr.ifr_name, "can0");
ioctl(sockfd, SIOCGIFINDEX, &ifr);
can_addr.can_family = AF_CAN;
can_addr.can_ifindex = ifr.ifr_ifindex;
ret = bind(sockfd, (struct sockaddr *)&can_addr, sizeof(can_addr));
if (0 > ret) {
perror("bind error");
close(sockfd);
exit(EXIT_FAILURE);
}
for ( ; ; ) {
if (0 > read(sockfd, &frame, sizeof(struct can_frame))) {
perror("water read error");
break;
}
if (frame.can_id & CAN_ERR_FLAG) {
printf("water Error frame!\n");
break;
}
if (frame.can_id & CAN_EFF_FLAG)
printf("扩展帧 <0x%08x> ", frame.can_id & CAN_EFF_MASK);
else
printf("标准帧 <0x%03x> ", frame.can_id & CAN_SFF_MASK);
if (frame.can_id & CAN_RTR_FLAG) {
printf(" remote request\n");
continue;
}
printf(" [%d] ", frame.can_dlc);
for (i = 0; i < frame.can_dlc; i++)
printf("%02x ", frame.data[i]);
printf(" [子进程 接收数据] \n");
}
close(sockfd);
exit(EXIT_SUCCESS);
}
int main(void) {
struct ifreq ifr = {0};
struct sockaddr_can can_addr = {0};
struct can_frame frame = {0};
int sockfd = -1;
int ret;
int status;
int i;
switch (fork()) {
case -1:
perror("fork error");
exit(-1);
case 0:
procc();
sleep(1);
_exit(0);
default:
break;
}
sockfd = socket(PF_CAN, SOCK_RAW, CAN_RAW);
if(0 > sockfd) {
perror("socket error");
exit(EXIT_FAILURE);
}
strcpy(ifr.ifr_name, "can0");
ioctl(sockfd, SIOCGIFINDEX, &ifr);
can_addr.can_family = AF_CAN;
can_addr.can_ifindex = ifr.ifr_ifindex;
ret = bind(sockfd, (struct sockaddr *)&can_addr, sizeof(can_addr));
if (0 > ret) {
perror("bind error");
close(sockfd);
exit(EXIT_FAILURE);
}
setsockopt(sockfd, SOL_CAN_RAW, CAN_RAW_FILTER, NULL, 0);
frame.data[0] = 0xA0;
frame.data[1] = 0xB0;
frame.data[2] = 0xC0;
frame.data[3] = 0xD0;
frame.data[4] = 0xE0;
frame.data[5] = 0x11;
frame.data[6] = 0x22;
frame.data[7] = 0x33;
frame.can_dlc = 8;
frame.can_id = 0x321;
for ( ; ; ) {
ret = write(sockfd, &frame, sizeof(frame));
if(sizeof(frame) != ret) {
perror("write error");
goto TT;
}
printf("[OnefU] 主进程发送数据成功!!!\n");
sleep(1);
}
ret = waitpid(-1, &status, 0);
if (-1 == ret) {
if (ECHILD == errno) {
printf("没有需要等待回收的子进程\n");
exit(0);
}
else {
perror("wait error");
exit(-1);
}
}
printf("回收子进程<%d>, 终止状态<%d>\n", ret, WEXITSTATUS(status));
TT:
close(sockfd);
exit(EXIT_SUCCESS);
}
四、编译运行
1、编译命令:
gcc can.c -o can
2、运行命令
./can
3、运行输出效果如下图:
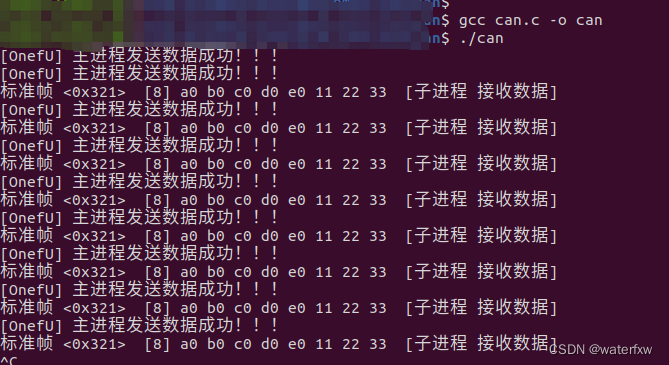
linux下can通信应用例程测试完毕,上述例程只是一个简单的应用。实际开发过程可能会更加复杂。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)