MS5611气压计数据采集(模拟IIC)/温度采集/相对高度求解
1、 MS5611气压计属性
1.1 基础属性
MS5611使用24位ADC,可以采集温度和气压,并且温度可以用来补偿气压,MS5611在出厂时进行了校准,校准的6个系数存储在PROM寄存器中, PROM寄存器起始地址0XA0, 从0xA0到0XAE, 一共16字节, 一共16*8 = 128位,其中每两个字节为一个系数:
第一个系数: 制造商定的,我们不用在意
第二到第七个系数:我们需要读取,后面用于气压计算
第八个系数:CRC
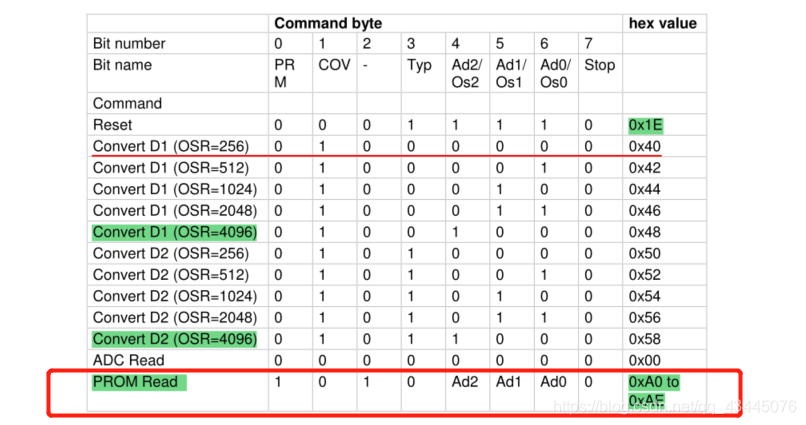
1.2 5个命令(COMMANDS)
分别是:
1、复位
2、读取PROM
3、D1转换, 其实就是设置读取气压的一些参数,然后MS5611会返回24字节(下文会说明)
4、D2转换,其实就是设置读取温度的一些参数
5、读取ADC中的数据
1.3 SPI和IIC接口
IIC模式:PS拉高
SPI模式:PS拉低
本实验用的是模拟IIC读取数据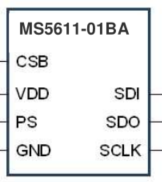
IIC模式中CSB拉低时, IIC从设备地址为0111 0111, CSB拉高时,IIC设备地址为0111 0110
2、 温度气压读取
IIC开始、结束、等待ack、读取发送函数等(参考匿名)
#define MS5611_ADDR 0x77
#define CMD_RESET 0x1E
#define CMD_ADC_READ 0x00
#define CMD_ADC_CONV 0x40
#define CMD_ADC_D1 0x00
#define CMD_ADC_D2 0x10
#define CMD_ADC_256 0x00
#define CMD_ADC_512 0x02
#define CMD_ADC_1024 0x04
#define CMD_ADC_2048 0x06
#define CMD_ADC_4096 0x08
#define CMD_PROM_RD 0xA0
#define PROM_NB 8
#define MS5611_OSR 0x08
int I2c_Soft_Start()
{
MS5611_IIC_SDA = 1;
MS5611_IIC_SCL = 1;
delay_us(4);
if(!MS5611_READ_SDA)return 0;
MS5611_IIC_SDA = 0;
delay_us(4);
if(MS5611_READ_SDA) return 0;
MS5611_IIC_SDA = 0;
delay_us(4);
return 1;
}
void I2c_Soft_Stop()
{
MS5611_IIC_SCL = 0;
delay_us(4);
MS5611_IIC_SDA = 0;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
MS5611_IIC_SDA = 1;
delay_us(4);
}
void I2c_Soft_Ask()
{
MS5611_IIC_SCL = 0;
delay_us(4);
MS5611_IIC_SDA = 0;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
MS5611_IIC_SCL = 0;
delay_us(4);
}
void I2c_Soft_NoAsk()
{
MS5611_IIC_SCL = 0;
delay_us(4);
MS5611_IIC_SDA = 1;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
MS5611_IIC_SCL = 0;
delay_us(4);
}
int I2c_Soft_WaitAsk(void)
{
u8 ErrTime = 0;
MS5611_IIC_SCL = 0;
delay_us(4);
MS5611_IIC_SDA = 1;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
while(MS5611_READ_SDA)
{
ErrTime++;
if(ErrTime>50)
{
I2c_Soft_Stop();
return 1;
}
}
MS5611_IIC_SCL = 0;
delay_us(4);
return 0;
}
void I2c_Soft_SendByte(u8 SendByte)
{
u8 i=8;
while(i--)
{
MS5611_IIC_SCL = 0;
delay_us(4);
if(SendByte&0x80)
MS5611_IIC_SDA = 1;
else
MS5611_IIC_SDA = 0;
SendByte<<=1;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
}
MS5611_IIC_SCL = 0;
}
u8 I2c_Soft_ReadByte(u8 ask)
{
u8 i=8;
u8 ReceiveByte=0;
MS5611_IIC_SDA = 1;
while(i--)
{
ReceiveByte<<=1;
MS5611_IIC_SCL = 0;
delay_us(4);
MS5611_IIC_SCL = 1;
delay_us(4);
if(MS5611_READ_SDA)
{
ReceiveByte|=0x01;
}
}
MS5611_IIC_SCL = 0;
if (ask)
I2c_Soft_Ask();
else
I2c_Soft_NoAsk();
return ReceiveByte;
}
u8 IIC_Write_1Byte(u8 SlaveAddress,u8 REG_Address,u8 REG_data)
{
I2c_Soft_Start();
I2c_Soft_SendByte(SlaveAddress<<1);
if(I2c_Soft_WaitAsk())
{
I2c_Soft_Stop();
return 1;
}
I2c_Soft_SendByte(REG_Address);
I2c_Soft_WaitAsk();
I2c_Soft_SendByte(REG_data);
I2c_Soft_WaitAsk();
I2c_Soft_Stop();
return 0;
}
u8 IIC_Read_1Byte(u8 SlaveAddress,u8 REG_Address,u8 *REG_data)
{
I2c_Soft_Start();
I2c_Soft_SendByte(SlaveAddress<<1);
if(I2c_Soft_WaitAsk())
{
I2c_Soft_Stop();
return 1;
}
I2c_Soft_SendByte(REG_Address);
I2c_Soft_WaitAsk();
I2c_Soft_Start();
I2c_Soft_SendByte(SlaveAddress<<1 | 0x01);
I2c_Soft_WaitAsk();
*REG_data= I2c_Soft_ReadByte(0);
I2c_Soft_Stop();
return 0;
}
2.1 第一步:初始化MS5611
初始化包括:
1、复位
2、读取PROM中的6个关键系数
void MS5611_Reset(void)
{
IIC_Write_1Byte(MS5611_ADDR, CMD_RESET, 1);
}
u8 MS5611_Read_Prom(void)
{
uint8_t rxbuf[2] = { 0, 0 };
u8 check = 0;
u8 i;
for (i = 0; i < PROM_NB; i++)
{
check += IIC_Read_nByte(MS5611_ADDR, CMD_PROM_RD + i * 2, 2, rxbuf);
ms5611_prom[i] = rxbuf[0] << 8 | rxbuf[1];
}
if(check == PROM_NB)
return 1;
else
return 0;
}
2.2 第二步:获取温度数据

首先发送Convert D1命令,进行相应的配置,再发送ADC Read命令,然后MS5611会返回24位的温度数据, 这时候再去读取这些温度数据。
void MS5611_Start_T(void)
{
IIC_Write_1Byte(MS5611_ADDR, CMD_ADC_CONV + CMD_ADC_D2 + MS5611_OSR, 1);
}
void MS5611_Read_Adc_T(void)
{
IIC_Read_nByte( MS5611_ADDR, CMD_ADC_READ, 3, t_rxbuf );
}
2.3 第三步:获取气压数据

首先发送Convert D2命令,进行相应的配置,然后再发送ADC Read命令, 然后MS5611会返回24位的气压数据, 这时候再去读取这些气压数据。
void MS5611_Start_P(void)
{
CMD_ADC_CONV + CMD_ADC_D1 + MS5611_OSR = 0x58
IIC_Write_1Byte(MS5611_ADDR, CMD_ADC_CONV + CMD_ADC_D1 + MS5611_OSR, 1);
}
void MS5611_Read_Adc_P(void)
{
IIC_Read_nByte(MS5611_ADDR, CMD_ADC_READ, 3, p_rxbuf);
}
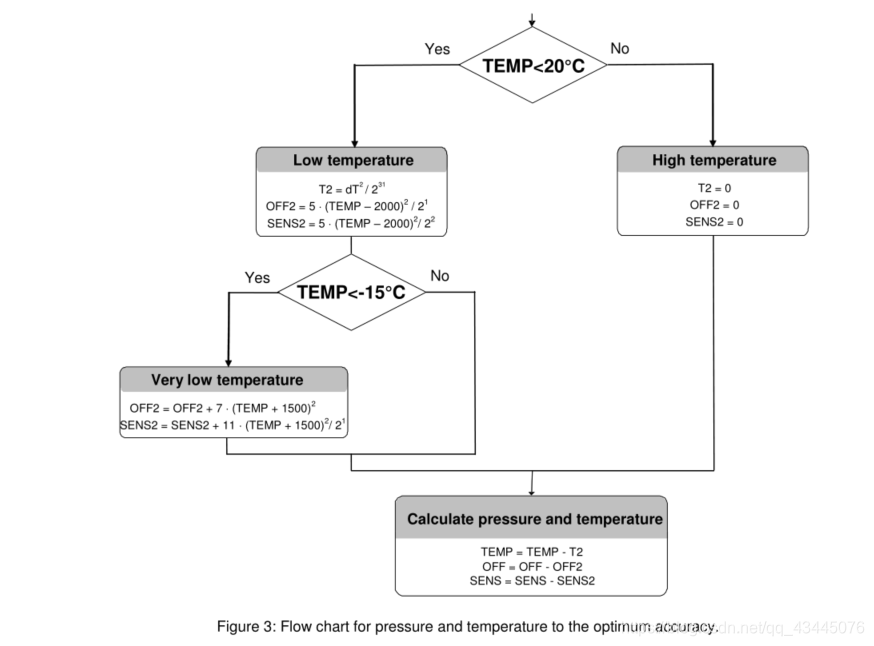
3、温度补偿气压
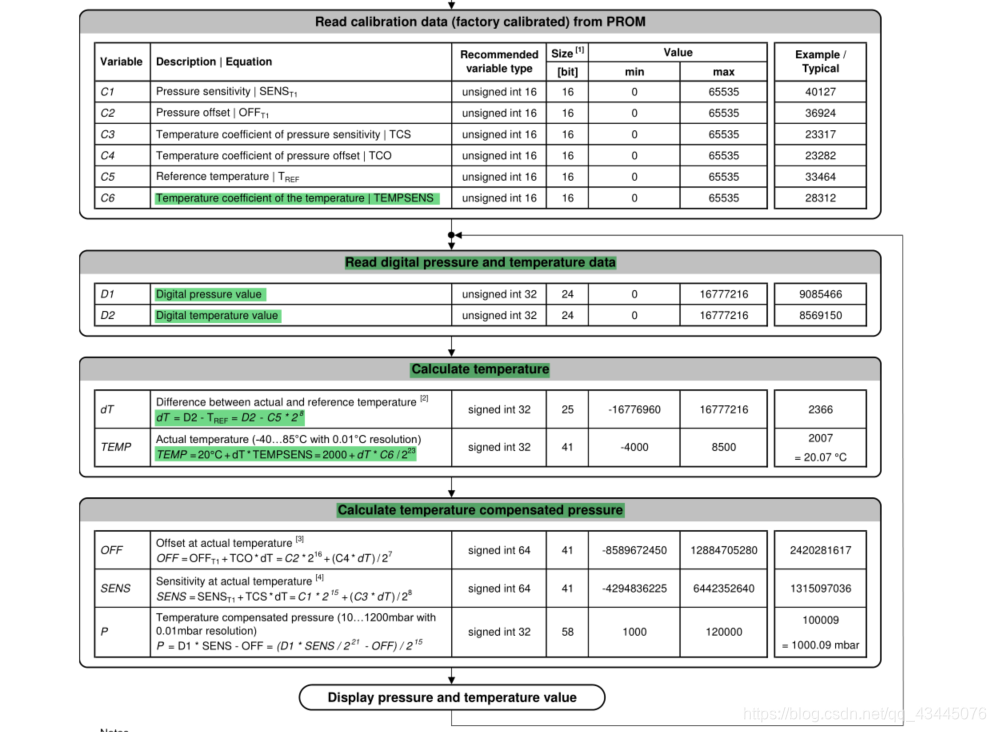
绝对高度(海拔)的求解公式:
H= 44300*(1- (P/P0)^(1/5.256) )
H为高度
P0为标准大气压(≈101Kpa)
P为读取的气压 (注意单位得和P0相同)
相对高度(例如飞机起飞前和飞行中的高度差)的求解
这里提供一个思路:
MS5611开机上电一段时间后,读取静止100组数据并转换成海拔,取个平均,这个海拔高度就相当于基准海拔,如果你把MS5611拿高或者拿低, 此时的海拔与基准海拔相见就是相对高度。
ps:求相对高度的时候,可以对此时的海拔高度数据进行一个滑动窗滤波,这样求出的相对高度比较平滑。
void MS5611_BaroAltCalculate(void)
{
float height = 0;
int64_t off2 = 0, sens2 = 0, delt = 0, f = 0, f2 = 0;
int32_t temperature = 0, pressure = 0, T2 = 0;
int32_t dT = 0;
int64_t off =0, sens =0;
static int num = 0;
static int cnt = 0;
double ms5611SumDat = 0.0;
ms5611_ut = (t_rxbuf[0] << 16) | (t_rxbuf[1] << 8) | t_rxbuf[2];
ms5611_up = (p_rxbuf[0] << 16) | (p_rxbuf[1] << 8) | p_rxbuf[2];
dT = ms5611_ut - ((uint32_t)ms5611_prom[5] << 8);
off = ((uint64_t)ms5611_prom[2] << 16) + (((int64_t)dT * ms5611_prom[4]) >> 7);
sens = ((uint64_t)ms5611_prom[1] << 15) + (((int64_t)dT * ms5611_prom[3]) >> 8);
temperature = 2000 + (((int64_t)dT * ms5611_prom[6]) >> 23);
if (temperature < 2000)
{
T2 = (dT*dT)>>31;
delt = temperature - 2000;
delt = delt * delt;
off2 = (5 * delt) >> 1;
sens2 = (5 * delt) >> 2;
if (temperature < -1500)
{
delt = temperature + 1500;
delt = delt * delt;
off2 += 7 * delt;
sens2 += (11 * delt) >> 1;
}
}
temperature -= T2;
off -= off2;
sens -= sens2;
ms5611Data.temperature = (double)temperature / 100.0;
pressure = (((ms5611_up * sens ) >> 21) - off) >> 15;
ms5611Data.pressure = (double)pressure / 100.0;
height = (double)((1.0f - pow((double)pressure / 101325.0f, 0.190295f)) * 44330.0f);
ms5611Data.height = height;
if(num > 100)
{
if(cnt < MS5611_WIN_FILTER)
{
alt[cnt] = ms5611Data.height;
cnt++;
}
else
{
ms5611SumDat = 0.0;
for(int i=0; i<MS5611_WIN_FILTER-1; i++)
{
alt[i] = alt[i+1];
ms5611SumDat += alt[i];
}
alt[cnt-1] = ms5611Data.height;
ms5611SumDat += alt[cnt-1];
ms5611CurAlt = ms5611SumDat/MS5611_WIN_FILTER;
if(baroCalOk == true)
{
ms5611CurAlt -= ms5611StartAlt;
}
}
num = 100;
}
num++;
}
4、总结
MS5611主要是用于计算高度,比如可以用于四旋翼的定高等。
MS5611求海拔高度的时候,由于受温度,气流等各种因素的影响,最终的结果并不理想,
例如下面是我静止采集的30分钟左右的数据,可以明显看到高度是飘的。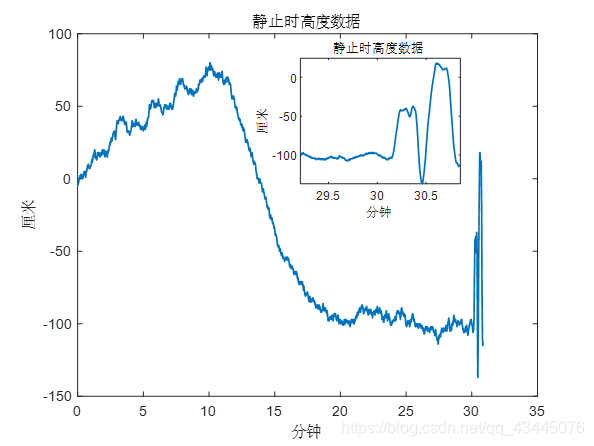
最后30分钟左右是我把ms5611拿上拿下来测试的, 所以出现了上图中的波动。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)