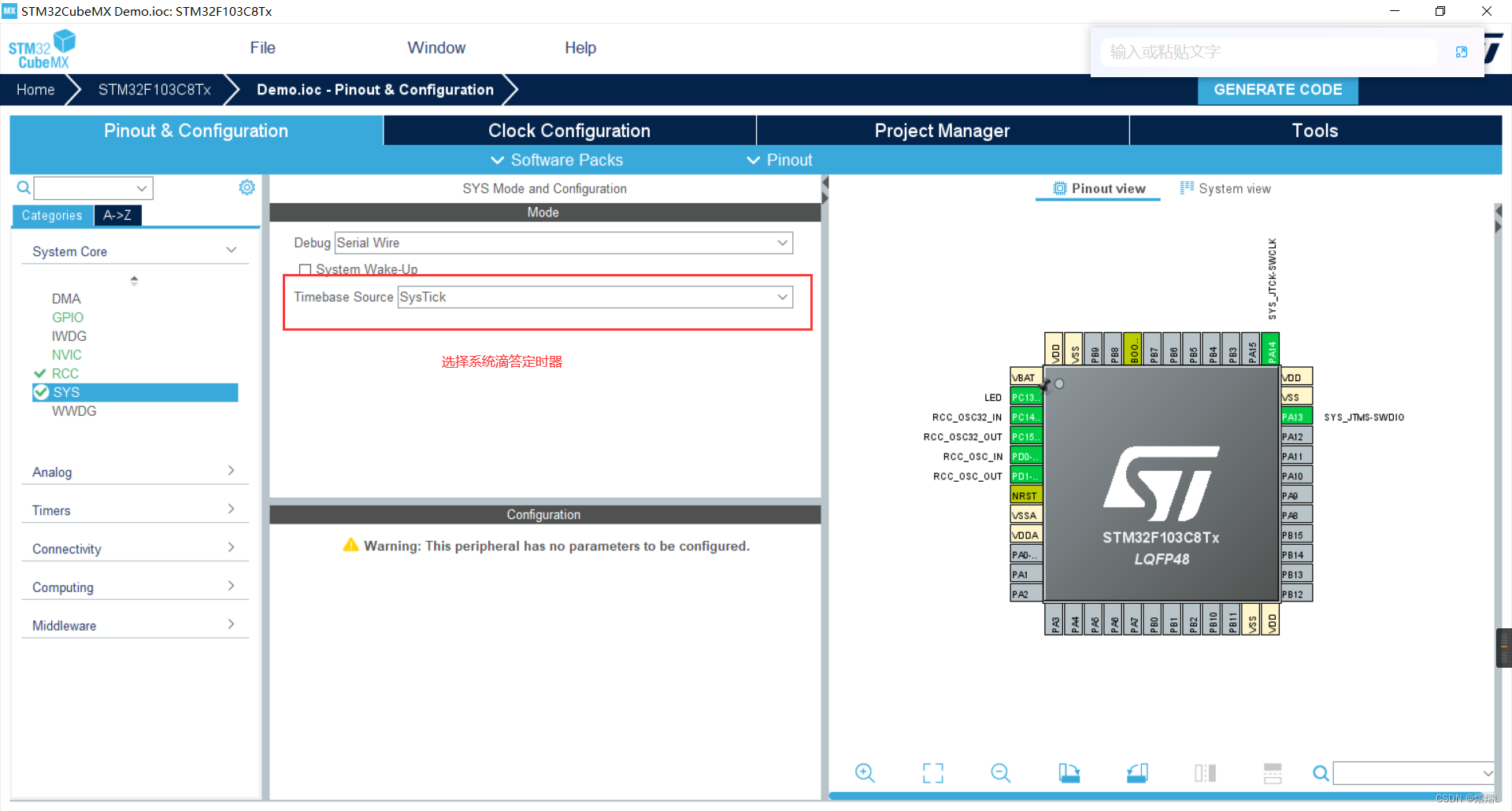
SysTick定时器被捆绑在NVIC中,是一个简单的定时器,对于CM3、CM4内核芯片,都有Systick定时器。Systick定时器常用来做延时,或者实时系统的心跳时钟。这样可以节省MCU资源,不用浪费一个定时器。
Systick定时器就是系统滴答定时器,一个24 位的倒计数定时器,计到0 时,将从RELOAD 寄存器中自动重装载定时初值。
系统滴答定时器有4个寄存器
| CTRL | SysTick控制及状态寄存器(地址:0xE000_E010) |
|---|
| LOAD | SysTick重装载数值寄存器(地址:0xE000_E014) |
| VAL | SysTick当前数值寄存器(地址:0xE000_E018) |
| CALIB | SysTick校准数值寄存器(地址:0xE000_E01C) |
时钟源
该定时器的时钟源可以是
- 内部时钟(FCLK,CM3上的自由运行时钟)
- 外部时钟( CM3处理器上的STCLK信号)
通过SysTick控制及状态寄存器的第2位来确定

STM32的时钟树
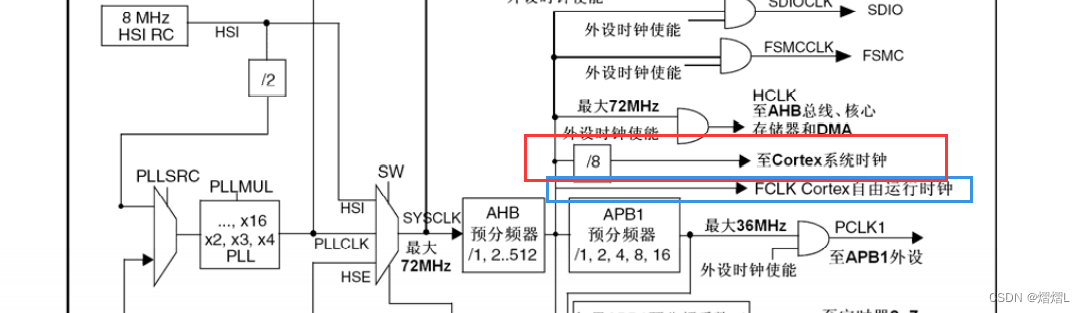
RCC通过AHB时钟(HCLK)8分频或者不分频作为Cortex系统定时器(SysTick)的外部时钟。CLKSOURCE = 0
FCLK是Cortex™-M3的自由运行时钟。详情见ARM的Cortex™-M3技术参考手册。CLKSOURCE = 1
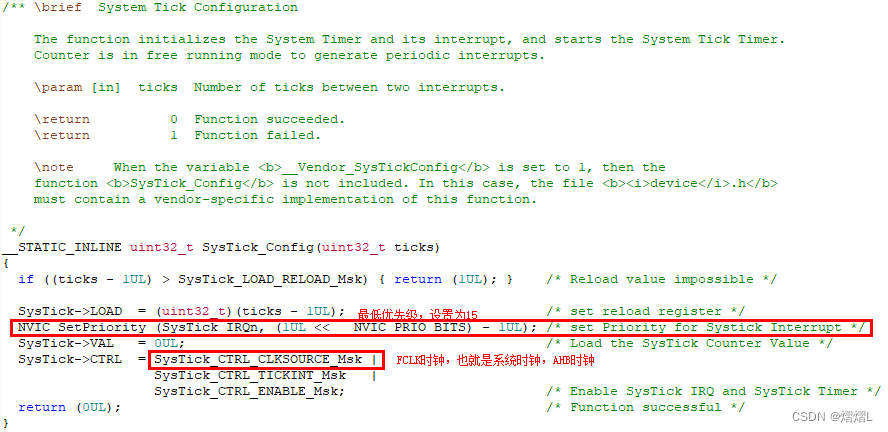
由下图代码可知,库函数默认选择FCLK时钟作为SysTick的时钟源
RCC_GetClocksFreq(&RCC_Clocks);
SysTick_Config(RCC_Clocks.HCLK_Frequency / 1000);
SysTick控制及状态寄存器

SysTick重装载数值寄存器
24位的倒计数器

SysTick当前数值寄存器

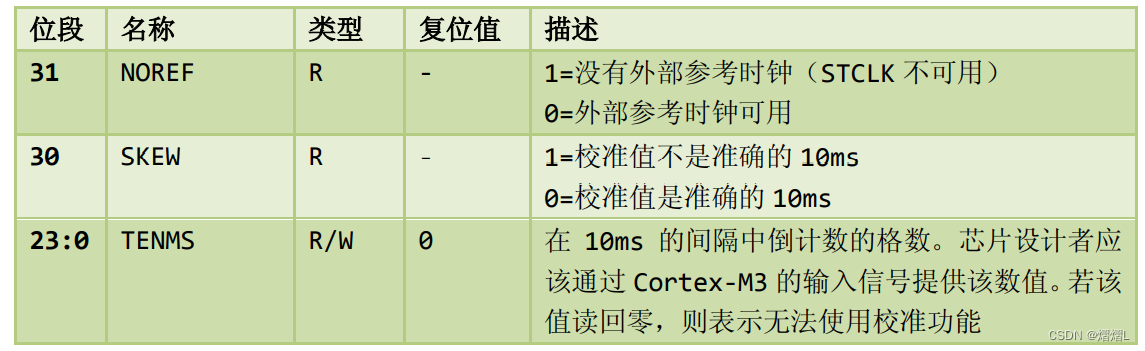
SysTick校准数值寄存器
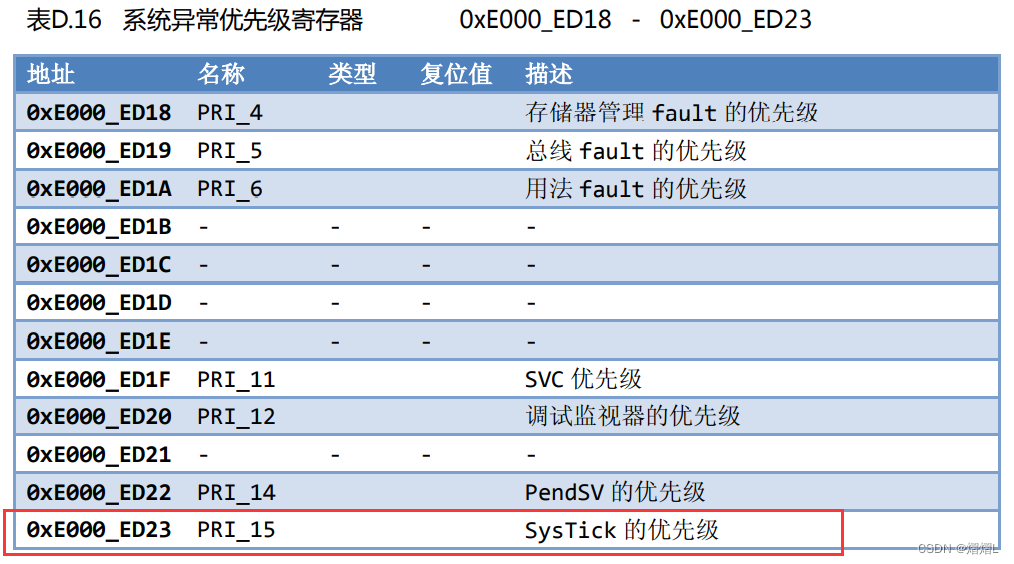
系统滴答定时器中断优先级设置
通过系统异常优先级寄存器来设置系统滴答定时器的优先级
在设置优先级之前得确定优先级分组,几位是抢占式优先级,几位是子优先级。
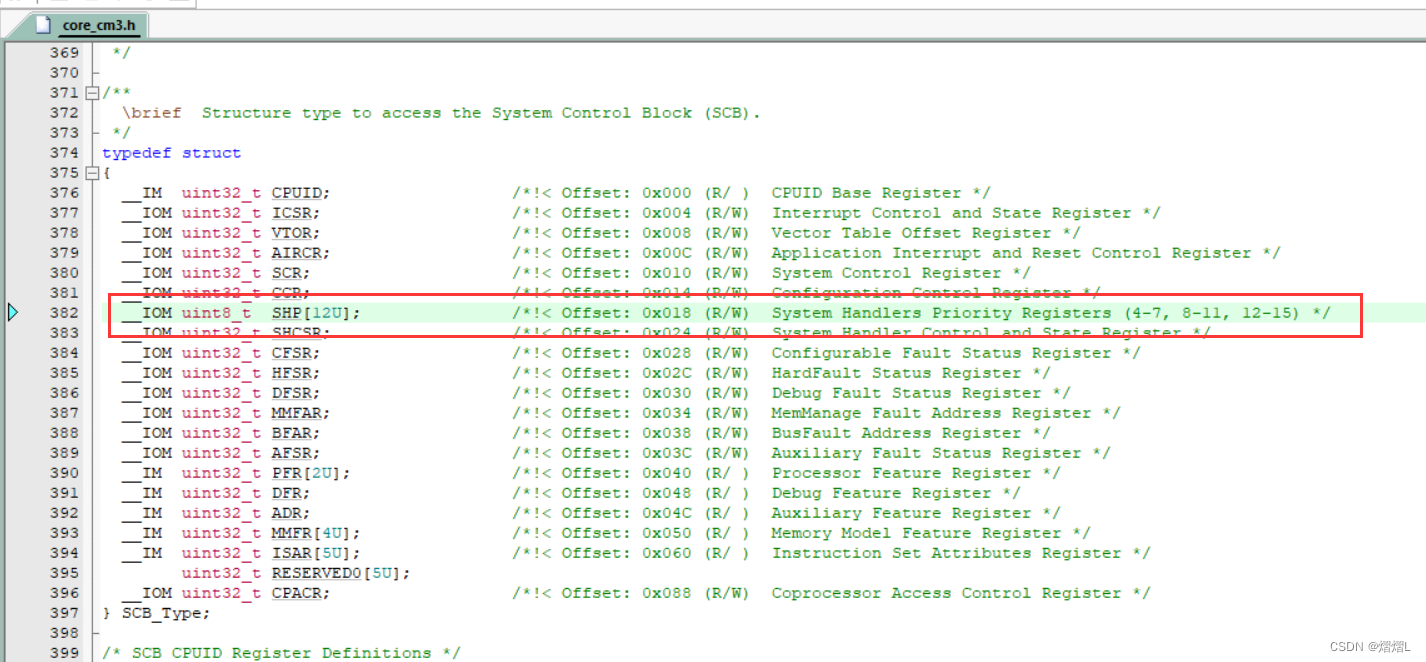
系统异常优先级寄存器在C文件中的代码
core_cm3.h
直接操作寄存器配置系统滴答定时器demo
采用STM32F103C8T6单片机,KeilMDK5.32版本
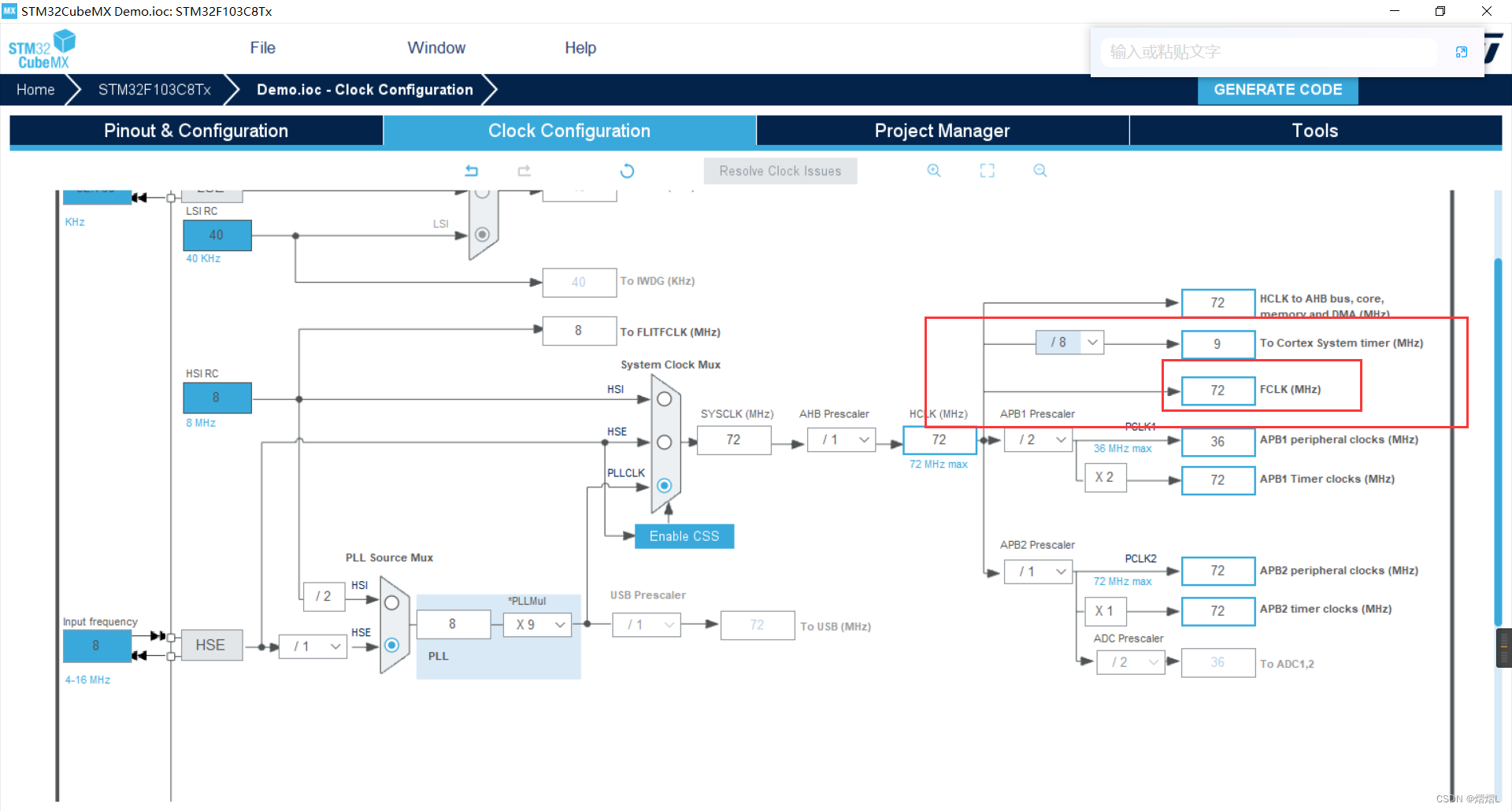
时钟配置如下图
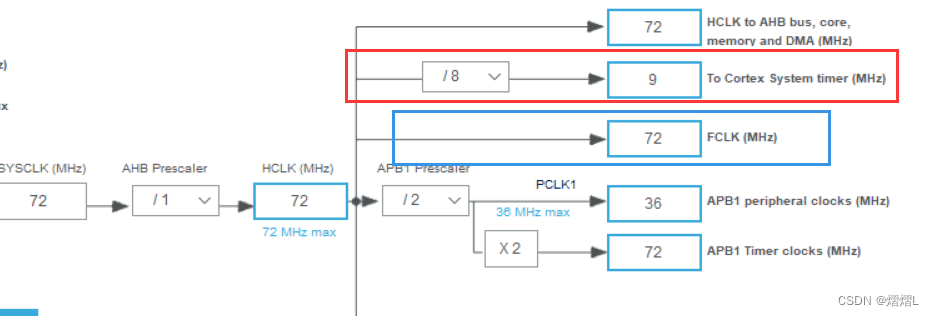
选用外部时钟源(STCLK)即Cortex System timer 频率为9MHz作为系统滴答定时器的时钟源
系统滴答定时器定时时间为1ms,也就是1KHz,根据时钟源频率 9MHz/1KHz = 9000;
即系统滴答定时器重载值为9000-1=8999。
SysTick->LOAD = 8999;
NVIC_SetPriority (SysTick_IRQn, (1UL << __NVIC_PRIO_BITS) - 1UL);
SysTick->VAL = 0UL;
SysTick->CTRL |= 0 << 2;
SCB->SHP[11] = 0xF0;
SysTick->CTRL |= 1 << 1;
SysTick->CTRL |= 1 << 0;
HAL库配置系统滴答定时器demo
采用STM32F103C8T6单片机,KeilMDK5.32版本
HAL库默认采用FCLK作为系统滴答定时器的时钟源72MHz
定时的时间为1ms,也就是1KHz,重载值为72000-1=71999
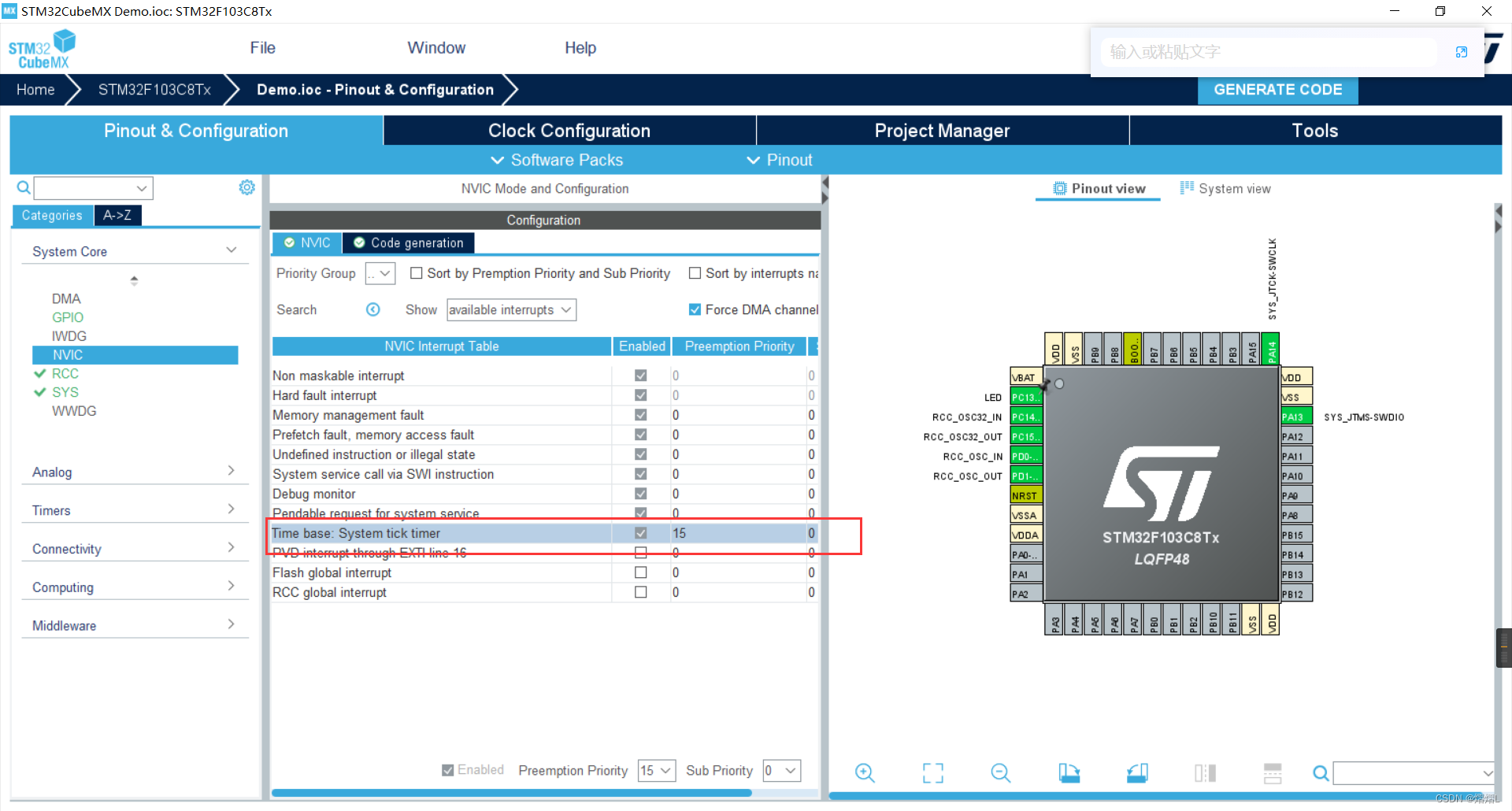
优先级为15
PC13控制LED灯,LED的亮灭指示程序运行状态
STM32CubeMX配置
主要代码

先看序号1
函数HAL_Init()调用HAL_InitTick()来配置系统滴答定时器,
HAL_Init()
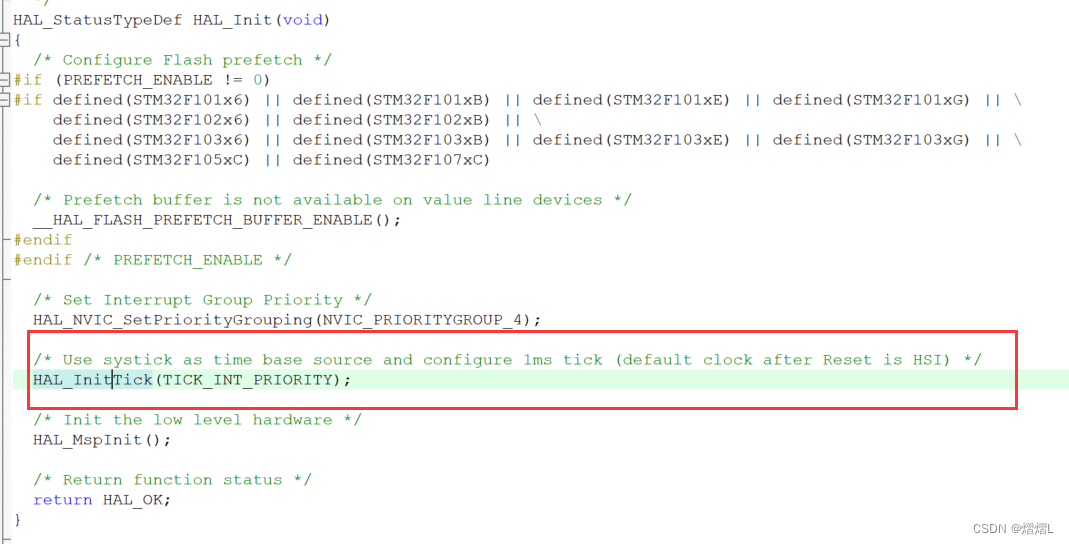
HAL_InitTick()调用HAL_SYSTICK_Config()配置系统滴答定时器,和设置系统滴答定时器的优先级(优先级为15)。
HAL_InitTick()
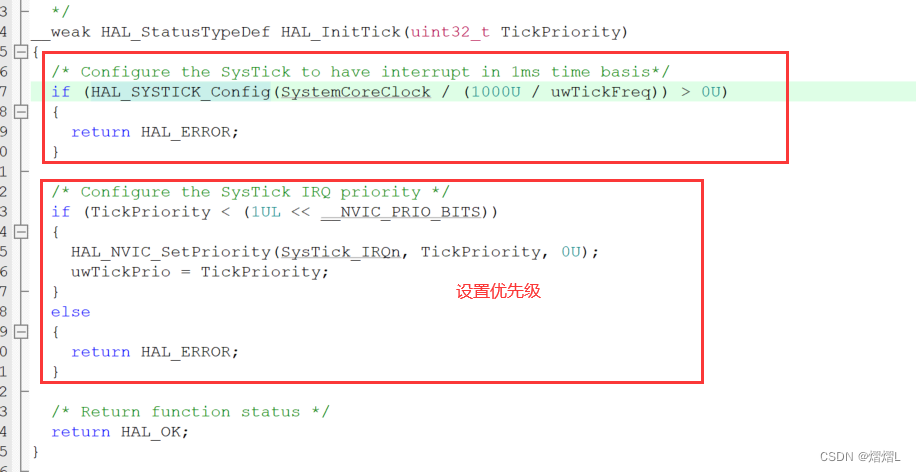
HAL_SYSTICK_Config()调用SysTick_Config()来进行配送系统滴答定时器
SysTick_Config()
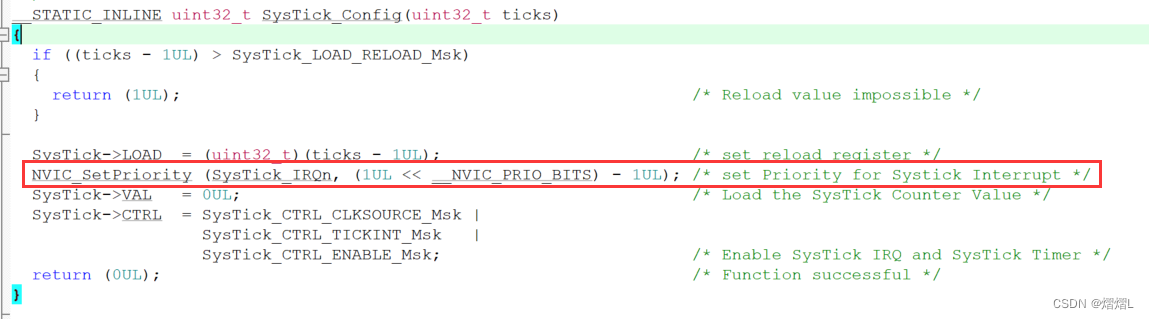
SysTick_Config()根据参数ticks来设置重载值,清除当前计数值,选择FCLK(72MHz)作为时钟源,设置中断优先级为15,并使能系统滴答定时器。
注意:此时FCLK还不是72MHz,因为STM32的时钟树相关的寄存器还未被设置。
序号2
SystemClock_Config()调用了HAL_RCC_ClockConfig()。
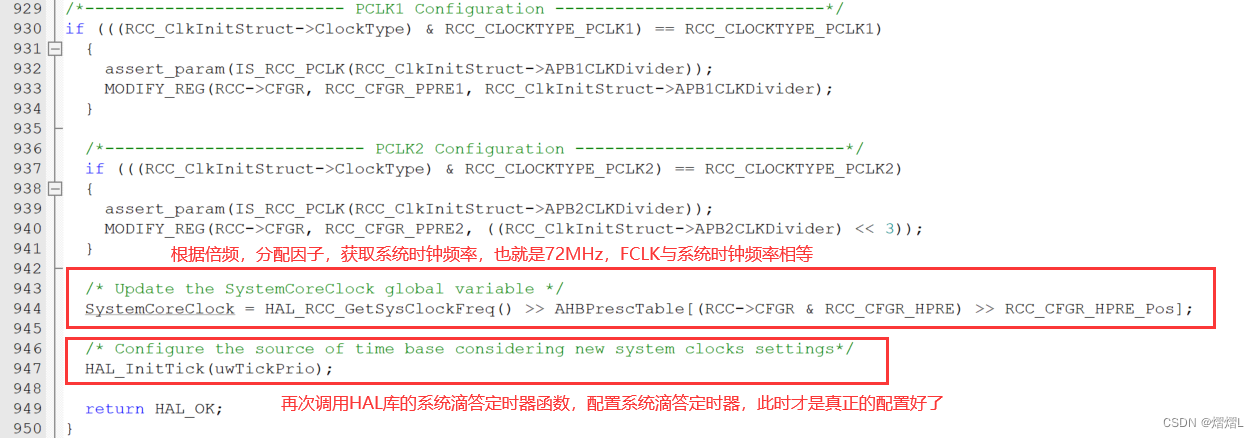
HAL_RCC_ClockConfig()配置STM32的时钟树,将FCLK的频率设置为72MHz,再次调用HAL_InitTick()配置系统滴答定时器
此时才是真正的配置好了系统滴答定时器
HAL_RCC_ClockConfig()
工程文件下载链接
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)