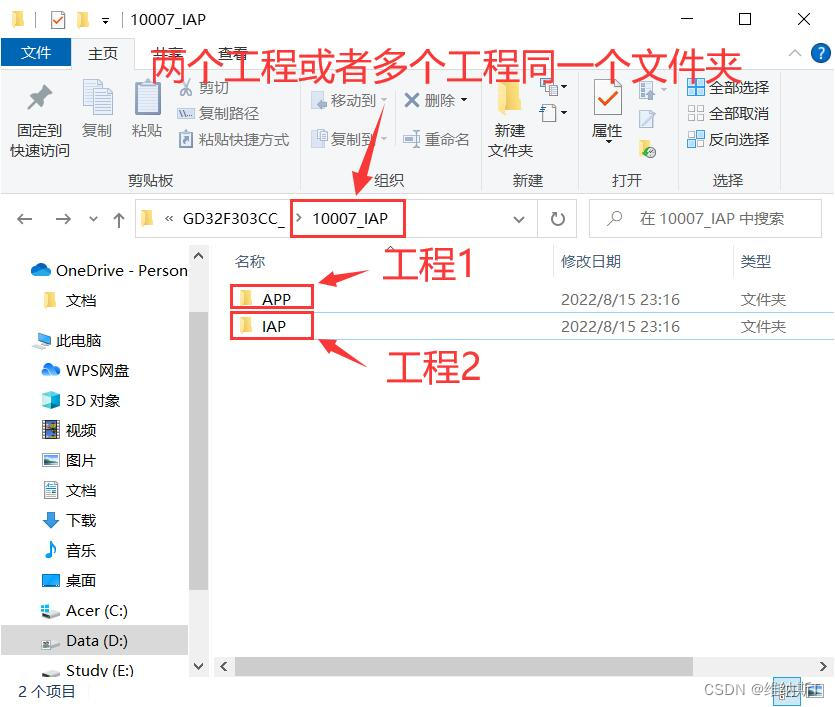
1.首先工程文件需要在同样的文件夹里


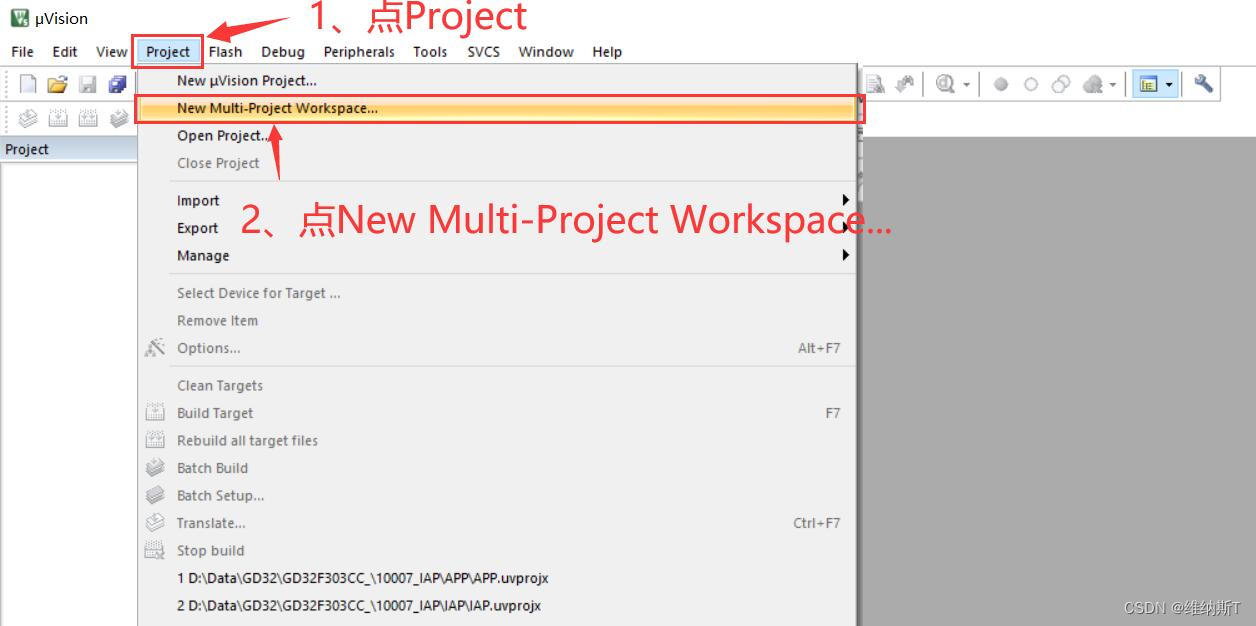
2.打开keil5,选择Project - New Multi-Project Workspace...
3.将工程文件建立在刚刚的总文件夹里面,命名保存

4.弹出此页面(Create New Multi-Project Workspace -> uVision Project Items)

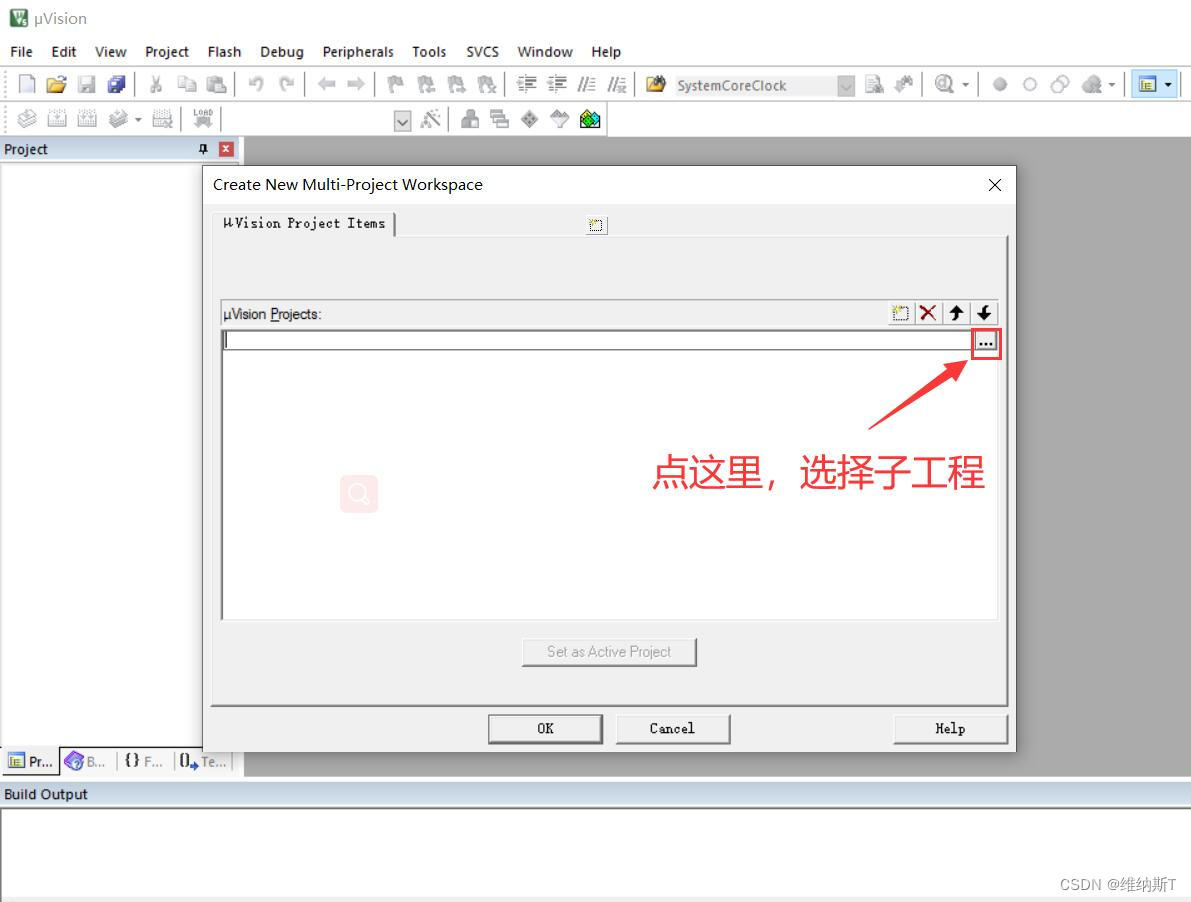

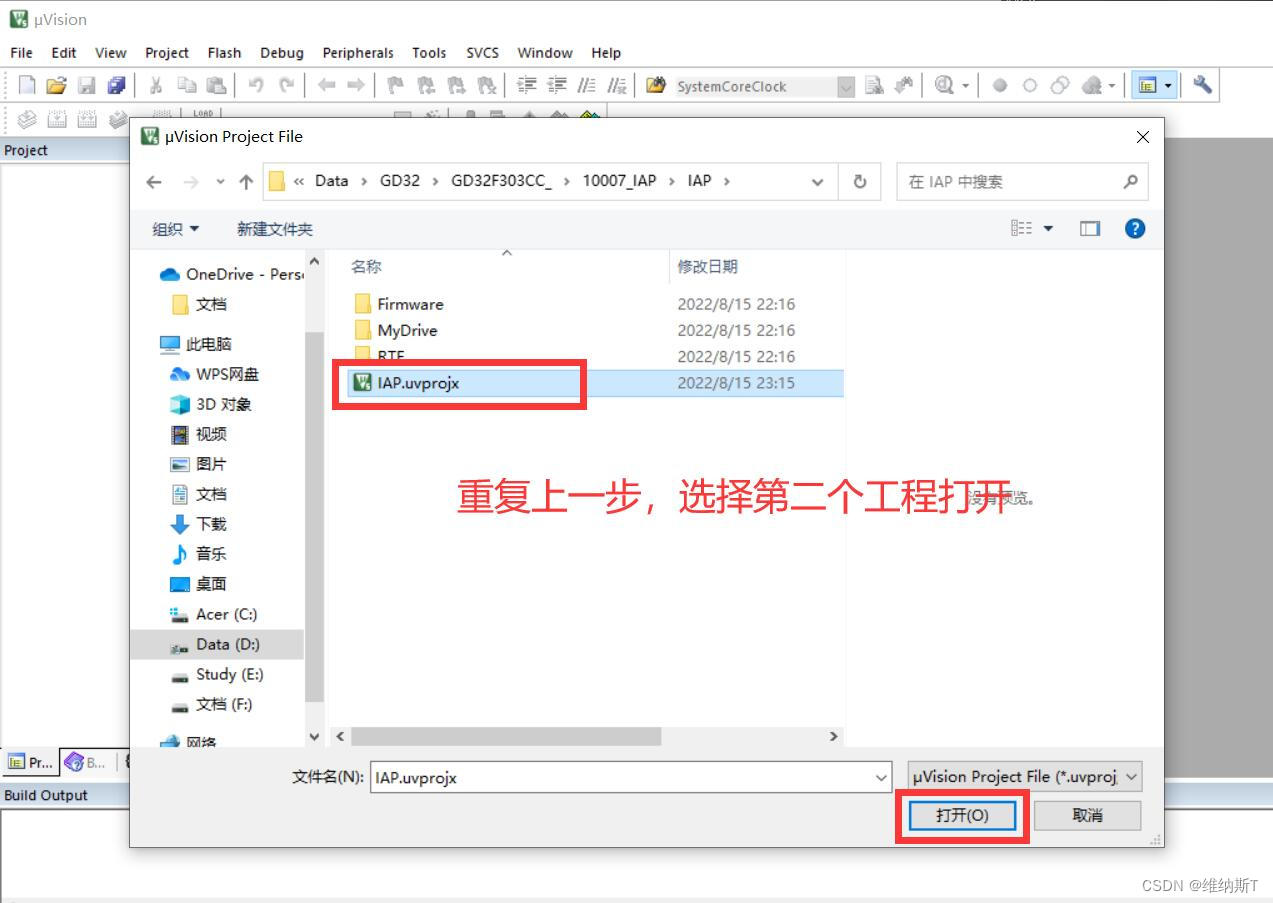
5.工程选择完毕后,将子工程文件设置一下,然后点击ok

6.以后直接用keil5打开此工程文件,就可以通过一个父工程文件打开多个子工程文件了。

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)