学习视频:https://www.bilibili.com/video/BV1zt411G7Vn?p=12
目标:消息的自定义,发布及订阅个人信息
一、自定义话题信息
1.定义msg文件
mkdir ~/catkin_ws/src/learning_topic/msg
gedit ~/catkin_ws/src/learning_topic/msg/Person.msg
运行命令打开Person.msg文件
string name
uint8 age
uint8 sex
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
复制上面代码保存退出。
2.在package.xml中添加功能包依赖
gedit ~/catkin_ws/src/learning_topic/package.xml
运行命令打开package.xml文件。
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
复制上面代码保存退出。

biild_depend:编译依赖
exec_depend:执行依赖
3.在CMakeLists.txt添加编译选项
gedit ~/catkin_ws/src/learning_topic/CMakeLists.txt
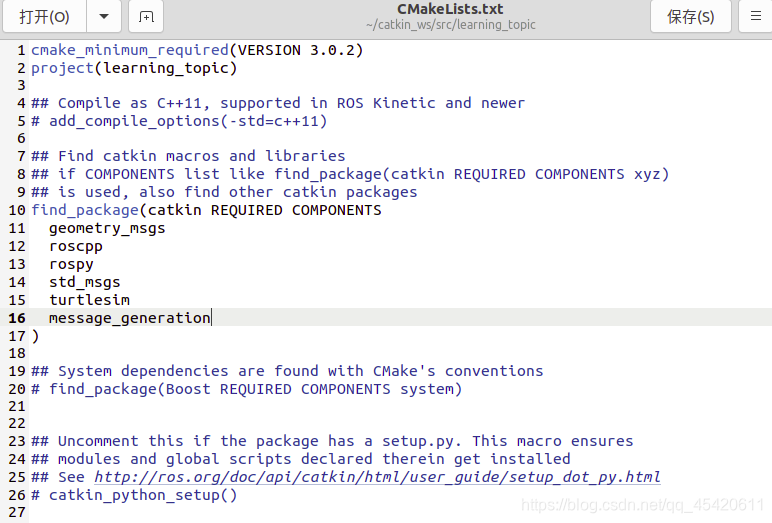
运行命令打开CMakeList.txt文件。
首先在find_package函数中添加 message_generation依赖功能包
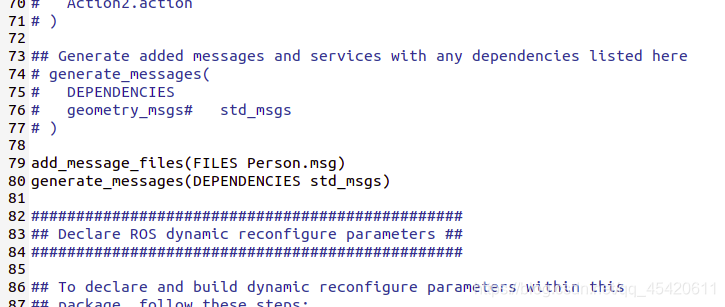
然后添加下面代码
add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)
如下图所示位置
add_message_files:添加编译的接口
generate_messages:添加需要依赖的ros库
最后在catkin_package函数中添加message_runtime依赖功能包。
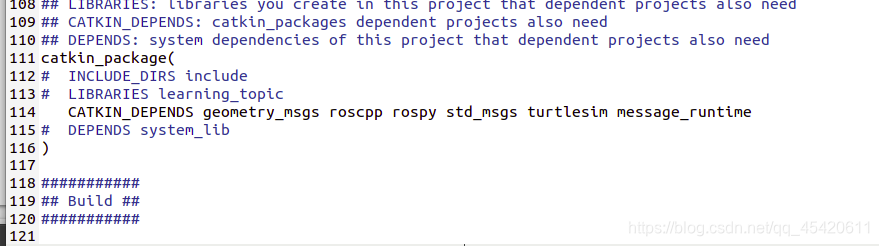
保存退出文件。
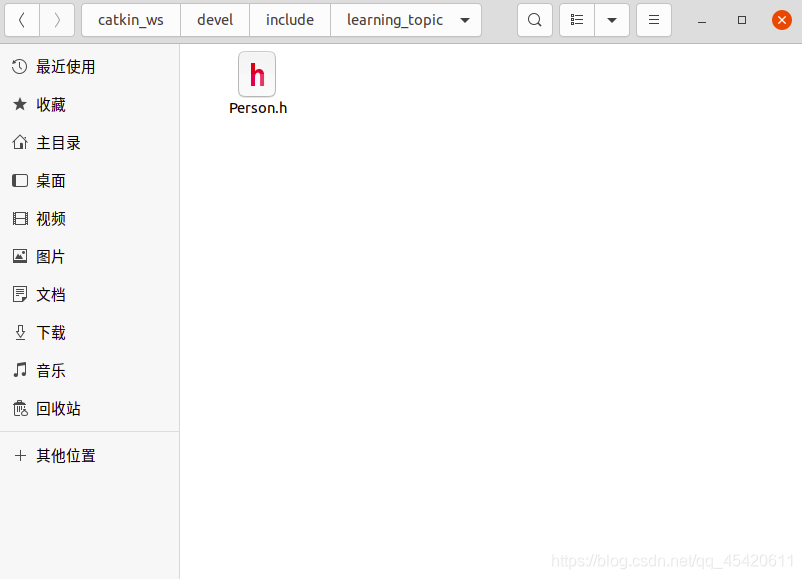
4.编译生成语言相关文件
cd ~/catkin_ws
catkin_make
可以在devel/include.learning_topic文件夹下生成Person.h文件。
二、用C++创建发布者及订阅者代码
1.创建发布者代码
运行命令打开person_publisher.cpp文件。
gedit ~/catkin_ws/src/learning_topic/src/person_publisher.cpp
复制下面代码保存退出。
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include <ros/ros.h>
#include "learning_topic/Person.h"
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "person_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10
ros::Publisher person_info_pub = n.advertise<learning_topic::Person>("/person_info", 10);
// 设置循环的频率
ros::Rate loop_rate(1);
int count = 0;
while (ros::ok())
{
// 初始化learning_topic::Person类型的消息
learning_topic::Person person_msg;
person_msg.name = "Tom";
person_msg.age = 18;
person_msg.sex = learning_topic::Person::male;
// 发布消息
person_info_pub.publish(person_msg);
ROS_INFO("Publish Person Info: name:%s age:%d sex:%d",
person_msg.name.c_str(), person_msg.age, person_msg.sex);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
2.创建订阅者代码
运行命令打开person_subscriber.cpp文件。
gedit ~/catkin_ws/src/learning_topic/src/person_subscriber.cpp
复制下面代码保存退出。
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include <ros/ros.h>
#include "learning_topic/Person.h"
// 接收到订阅的消息后,会进入消息回调函数
void personInfoCallback(const learning_topic::Person::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Subcribe Person Info: name:%s age:%d sex:%d",
msg->name.c_str(), msg->age, msg->sex);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "person_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback
ros::Subscriber person_info_sub = n.subscribe("/person_info", 10, personInfoCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
3.配置代码编译规则
运行指令打开CMakeLists.txt文件。
gedit ~/catkin_ws/src/learning_topic/CMakeLists.txt
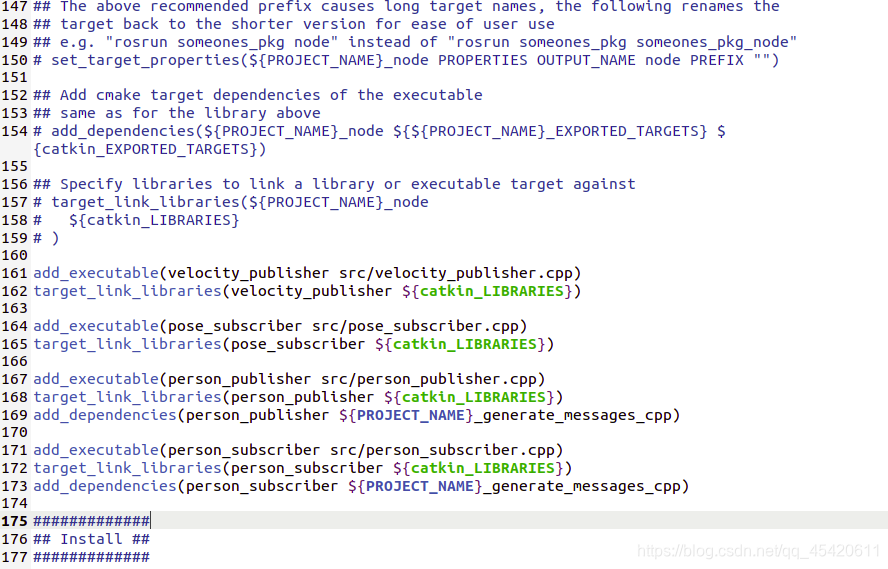
添加下列代码,如图所示
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)
保存退出文件。
add_dependencies:添加依赖项。
三、用Python创建发布者及订阅者代码
1.创建发布者代码
运行执行打开person_publisher.py文件
mkdir ~/catkin_ws/src/learning_topic/scripts
gedit ~/catkin_ws/src/learning_topic/scripts/person_publisher.py
复制下面代码,保存退出文件
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
import rospy
from learning_topic.msg import Person
def velocity_publisher():
# ROS节点初始化
rospy.init_node('person_publisher', anonymous=True)
# 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10
person_info_pub = rospy.Publisher('/person_info', Person, queue_size=10)
#设置循环的频率
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 初始化learning_topic::Person类型的消息
person_msg = Person()
person_msg.name = "Tom";
person_msg.age = 18;
person_msg.sex = Person.male;
# 发布消息
person_info_pub.publish(person_msg)
rospy.loginfo("Publsh person message[%s, %d, %d]", person_msg.name, person_msg.age, person_msg.sex)
# 按照循环频率延时
rate.sleep()
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
pass
设置person_publisher.py 文件运行权限
cd ~/catkin_ws/src/learning_topic/scripts
chmod +x person_publisher.py
2.创建发布者代码
运行执行打开person_subscriber.py文件
gedit ~/catkin_ws/src/learning_topic/scripts/person_subscriber.py
复制下面代码,保存退出文件
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
import rospy
from learning_topic.msg import Person
def personInfoCallback(msg):
rospy.loginfo("Subcribe Person Info: name:%s age:%d sex:%d",
msg.name, msg.age, msg.sex)
def person_subscriber():
# ROS节点初始化
rospy.init_node('person_subscriber', anonymous=True)
# 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback
rospy.Subscriber("/person_info", Person, personInfoCallback)
# 循环等待回调函数
rospy.spin()
if __name__ == '__main__':
person_subscriber()
设置person_subscriber.py 文件运行权限
cd ~/catkin_ws/src/learning_topic/scripts
chmod +x person_subscriber.py
四、编译功能包(Python不需要本步骤)
命令行输入
cd ~/catkin_ws/
catkin_make
五、运行程序
1.运行命令
roscore
2.打开新的命令窗,运行命令
rosrun learning_topic person_subscriber.py
3.接着打开命令窗,运行命令
rosrun learning_topic person_publisher.py