简要说明
如题,公司最近更换820*320屏幕,移植stemwin,使用3线spi通讯+16RGB,这屏幕工作流程为:首先通过3线spi发送初始化指令,之后通过16bitRGB发送像素点。
移植过程参考了安富莱、野火、https://www.nxpic.org.cn/module/forum/thread-622198-1-1.html
移植过程
首先对屏幕进行初始化,使用模拟3线SPI方式,因为为9bit方式,首位代表命令。
手册上的通讯时序如下:
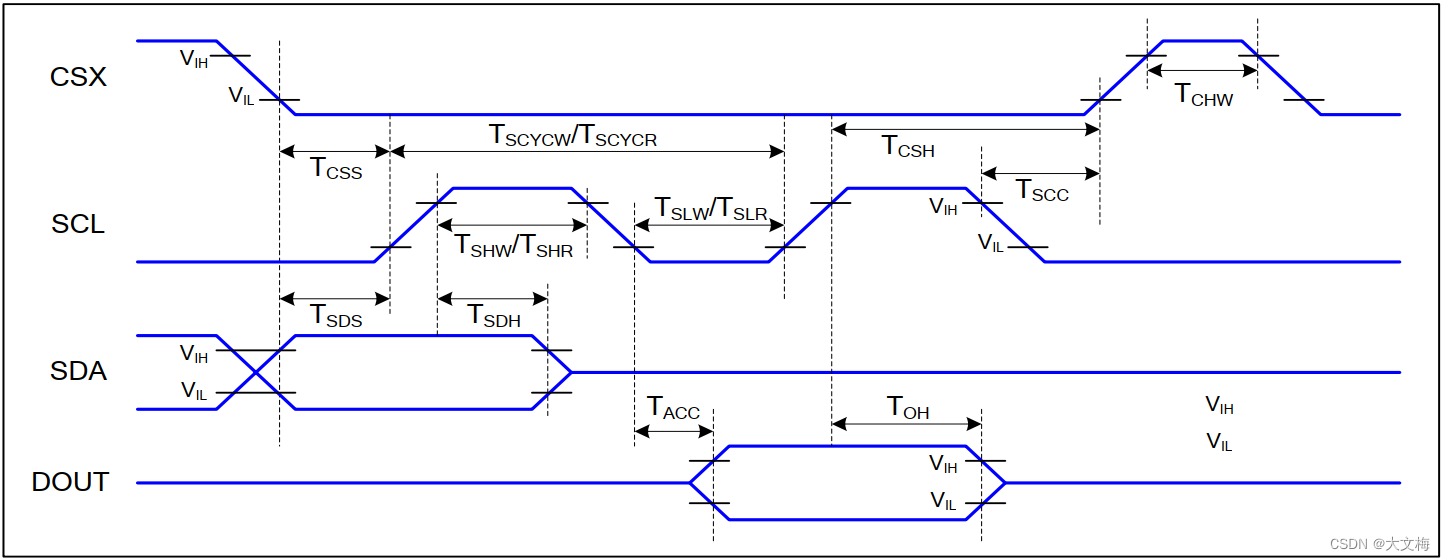
但实际上这时序是个坑,实际上的时序如下:

SCL在空闲状态为高电平,然后在第一个上升沿采样,也是就CPOL=1、CPHA=1。
初始化代码如下:最主要就是要把SCL拉高。
void SPI3_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd ( SDI_GPIO_CLK|
SCL_GPIO_CLK|
CS_GPIO_CLK|
RES_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = SDI_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD; //SDA有上拉电阻
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_Init(SDI_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Pin = SCL_PIN;
GPIO_Init(SCL_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = CS_PIN;
GPIO_Init(CS_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = RES_PIN;
GPIO_Init(RES_GPIO_PORT, &GPIO_InitStructure);
SET_LSCE_HIGH;
SET_LSCK_LOW;
SET_LSCK_HIGH;
}
时序部分参考https://www.nxpic.org.cn/module/forum/thread-622198-1-1.html
static void St7701_Write_Byte(unsigned short temp)
{
unsigned char i;
SET_LSCE_LOW;
// GPIO_PortClear(GPIO, 4U, 1<<0U);
for(i=0;i<9;i++)
{
SET_LSCK_LOW;
// ST7701_SCL(0);
if(temp&0x0100)
// ST7701_SDA(1);
SET_LSDA_HIGH;
else
// ST7701_SDA(0);
SET_LSDA_LOW;
UDELAY(5);
SET_LSCK_HIGH;
// ST7701_SCL(1);
UDELAY(5);
temp = temp<<1;
}
SET_LSCE_HIGH;
// GPIO_PortSet(GPIO, 4U, 1<<0U);
}
static void St7701_WriteCommand(uint8_t c)
{
unsigned short temp = 0x00;
temp = temp | c;
St7701_Write_Byte(temp);
UDELAY(100);
}
static void St7701_WriteData(uint8_t c)
{
unsigned short temp = 0x100;
temp = temp | c;
St7701_Write_Byte(temp);
UDELAY(100);
}
#define W_C(x) St7701_WriteCommand(x)
#define W_D(x) St7701_WriteData(x)
void LCD_SPI_Init(void)
{
uint8_t id1, id2, id3;
SPI3_GPIO_Config();
SET_LRES_HIGH;
mdelay(1);
SET_LRES_LOW;
mdelay(100);
SET_LRES_HIGH;
mdelay(200);
//id1 = SPI_St7701s_ReadByte(0xDA);
//id2 = SPI_St7701s_ReadByte(0xDB);
//id3 = SPI_St7701s_ReadByte(0xDC);
#if 1
W_C (0x11);
mdelay(20); //Delayms 20ms
W_C (0xFF);
W_D (0x77);
W_D (0x01);
W_D (0x00);
W_D (0x00);
W_D (0x13);
W_C (0xEF);
W_D (0x08);
W_C (0xFF);
W_D (0x77);
W_D (0x01);
W_D (0x00);
W_D (0x00);
W_D (0x10);
W_C (0xC0); //设置显示行为820
W_D (0xE5);
W_D (0x02);
W_C (0xC1); //设置VBP=12,VFP=10
W_D (0x0C);
W_D (0x0A);
W_C (0xC2); //反转选择性和帧率控制
W_D (0x07); //7Column
W_D (0x0F); //PCLK=512+(0X0F*16)=752
W_C (0xC3); //RGB控制
W_D (0x02); //RGB DE mode--VSYNC信号极性(LOW)--HSYNC信号极性(LOW)--DP = “1” The data is input on the negative edge of DOTCLK--|||||||EP = 0 The data DB23-0 is written when ENABLE = “1”. Disable data write operation when ENABLE = “0”
//HBP--0x10 VBP=0x08(猜测为HFP)
W_C (0xCC);
W_D (0x10);
W_C(0xCd);
W_D(0x08);
W_C (0xB0);
W_D (0x00);
W_D (0x08);
W_D (0x51);
W_D (0x0D);
W_D (0xCE);
W_D (0x06);
W_D (0x00);
W_D (0x08);
W_D (0x08);
W_D (0x1D);
W_D (0x02);
W_D (0xD0);
W_D (0x0F);
W_D (0x6F);
W_D (0x36);
W_D (0x3F);
W_C (0xB1);
W_D (0x00);
W_D (0x10);
W_D (0x4F);
W_D (0x0C);
W_D (0x11);
W_D (0x05);
W_D (0x00);
W_D (0x07);
W_D (0x07);
W_D (0x1F);
W_D (0x05);
W_D (0xD3);
W_D (0x11);
W_D (0x6E);
W_D (0x34);
W_D (0x3F);
W_C (0xFF);
W_D (0x77);
W_D (0x01);
W_D (0x00);
W_D (0x00);
W_D (0x11);
W_C (0xB0);
W_D (0x4D);
W_C (0xB1);
W_D (0x1C);
W_C (0xB2);
W_D (0x87);
W_C (0xB3);
W_D (0x80);
W_C (0xB5);
W_D (0x47);
W_C (0xB7);
W_D (0x85);
W_C (0xB8);
W_D (0x21);
W_C (0xB9);
W_D (0x10);
W_C (0xC1);
W_D (0x78);
W_C (0xC2);
W_D (0x78);
W_C (0xD0);
W_D (0x88);
UDELAY(100); //---------------------------------------
W_C (0xE0);
W_D (0x80);
W_D (0x00);
W_D (0x02);
W_C (0xE1);
W_D (0x04);
W_D (0xA0);
W_D (0x00);
W_D (0x00);
W_D (0x05);
W_D (0xA0);
W_D (0x00);
W_D (0x00);
W_D (0x00);
W_D (0x60);
W_D (0x60);
W_C (0xE2);
W_D (0x30);
W_D (0x30);
W_D (0x60);
W_D (0x60);
W_D (0x3C);
W_D (0xA0);
W_D (0x00);
W_D (0x00);
W_D (0x3D);
W_D (0xA0);
W_D (0x00);
W_D (0x00);
W_D (0x00);
W_C (0xE3);
W_D (0x00);
W_D (0x00);
W_D (0x33);
W_D (0x33);
W_C (0xE4);
W_D (0x44);
W_D (0x44);
W_C (0xE5);
W_D (0x06);
W_D (0x3E);
W_D (0xA0);
W_D (0xA0);
W_D (0x08);
W_D (0x40);
W_D (0xA0);
W_D (0xA0);
W_D (0x0A);
W_D (0x42);
W_D (0xA0);
W_D (0xA0);
W_D (0x0C);
W_D (0x44);
W_D (0xA0);
W_D (0xA0);
W_C (0xE6);
W_D (0x00);
W_D (0x00);
W_D (0x33);
W_D (0x33);
W_C (0xE7);
W_D (0x44);
W_D (0x44);
W_C (0xE8);
W_D (0x07);
W_D (0x3F);
W_D (0xA0);
W_D (0xA0);
W_D (0x09);
W_D (0x41);
W_D (0xA0);
W_D (0xA0);
W_D (0x0B);
W_D (0x43);
W_D (0xA0);
W_D (0xA0);
W_D (0x0D);
W_D (0x45);
W_D (0xA0);
W_D (0xA0);
W_C (0xEB);
W_D (0x00);
W_D (0x01);
W_D (0x4E);
W_D (0x4E);
W_D (0xEE);
W_D (0x44);
W_D (0x00);
W_C (0xED);
W_D (0xFF);
W_D (0xFF);
W_D (0x04);
W_D (0x56);
W_D (0x72);
W_D (0xFF);
W_D (0xFF);
W_D (0xFF);
W_D (0xFF);
W_D (0xFF);
W_D (0xFF);
W_D (0x27);
W_D (0x65);
W_D (0x40);
W_D (0xFF);
W_D (0xFF);
W_C (0xEF);
W_D (0x10);
W_D (0x0D);
W_D (0x04);
W_D (0x08);
W_D (0x3F);
W_D (0x1F);
W_C (0xFF);
W_D (0x77);
W_D (0x01);
W_D (0x00);
W_D (0x00);
W_D (0x13);
W_C (0xE8);
W_D (0x00);
W_D (0x0E);
W_C (0xFF);
W_D (0x77);
W_D (0x01);
W_D (0x00);
W_D (0x00);
W_D (0x00);
W_C (0x11);
UDELAY(100); //----------------------------
W_C (0xFF);
W_D (0x77);
W_D (0x01);
W_D (0x00);
W_D (0x00);
W_D (0x13);
W_C (0xE8);
W_D (0x00);
W_D (0x0C);
UDELAY(10 ); //-------------------------------
W_C (0xE8);
W_D (0x00);
W_D (0x00);
W_C (0xFF);
W_D (0x77);
W_D (0x01);
W_D (0x00);
W_D (0x00);
W_D (0x00);
W_C(0x36);
W_D(0x00); //0x00
W_C(0x3A);
W_D(0x50);
W_C(0x11);
/*
W_C (0xFF);
W_D (0x77);
W_D (0x01);
W_D (0x00);
W_D (0x00);
W_D (0x12);
W_C (0xD1);
W_D (0x81);
W_D (0x08);
W_D (0x03);
W_D (0x20);
W_D (0x08);
W_D (0x01);
W_D (0xA0);
W_D (0x01);
W_D (0xE0);
W_D (0xA0);
W_D (0x01);
W_D (0xE0);
W_D (0x03);
W_D (0x20);
W_C (0xD2);
W_D (0x08);
*/
UDELAY(100);
W_C(0x29);
Delay1ms(20);
#else
#endif
}
初始化过程注意SCL空闲电平就成,其他没啥好说的。
之后就是LCD的初始化,一把抄,改一下VBP、HBP、HFP、VFP这几个参数
void LCD_Init(void)
{
LTDC_InitTypeDef LTDC_InitStruct;
/* Enable the LTDC Clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_LTDC, ENABLE);
/* Enable the DMA2D Clock */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA2D, ENABLE);
/* Configure the LCD Control pins */
LCD_GPIO_Config();
/* Configure the FMC Parallel interface : SDRAM is used as Frame Buffer for LCD */
/* LTDC Configuration *********************************************************/
/* Polarity configuration */
/* Initialize the horizontal synchronization polarity as active low */
LTDC_InitStruct.LTDC_HSPolarity = LTDC_HSPolarity_AL;
/* Initialize the vertical synchronization polarity as active low */
LTDC_InitStruct.LTDC_VSPolarity = LTDC_VSPolarity_AL;
/* Initialize the data enable polarity as active low */
LTDC_InitStruct.LTDC_DEPolarity = LTDC_DEPolarity_AL;
//LTDC_InitStruct.LTDC_DEPolarity = LTDC_DEPolarity_AH;
/* Initialize the pixel clock polarity as input pixel clock */
LTDC_InitStruct.LTDC_PCPolarity = LTDC_PCPolarity_IPC;
/* Configure R,G,B component values for LCD background color */
LTDC_InitStruct.LTDC_BackgroundRedValue = 0;
LTDC_InitStruct.LTDC_BackgroundGreenValue = 0;
LTDC_InitStruct.LTDC_BackgroundBlueValue = 0;
/* 配置 PLLSAI 分频器,它的输出作为像素同步时钟CLK*/
/* PLLSAI_VCO 输入时钟 = HSE_VALUE/PLL_M = 1 Mhz */
/* PLLSAI_VCO 输出时钟 = PLLSAI_VCO输入 * PLLSAI_N = 384 Mhz */
/* PLLLCDCLK = PLLSAI_VCO 输出/PLLSAI_R = 384/6 Mhz */
/* LTDC 时钟频率 = PLLLCDCLK / DIV = 384/4/4 = 24 Mhz */
/* LTDC时钟太高会导花屏,若对刷屏速度要求不高,降低时钟频率可减少花屏现象*/
/* 以下函数三个参数分别为:PLLSAIN,PLLSAIQ,PLLSAIR,其中PLLSAIQ与LTDC无关*/
RCC_PLLSAIConfig(384, 7, 4);
/*以下函数的参数为DIV值*/
RCC_LTDCCLKDivConfig(RCC_PLLSAIDivR_Div4);
/* Enable PLLSAI Clock */
RCC_PLLSAICmd(ENABLE);
/* Wait for PLLSAI activation */
while(RCC_GetFlagStatus(RCC_FLAG_PLLSAIRDY) == RESET)
{
}
/* 时间参数配置 */
/* 配置行同步信号宽度(HSW-1) */
LTDC_InitStruct.LTDC_HorizontalSync =HSW-1;
/* 配置垂直同步信号宽度(VSW-1) */
LTDC_InitStruct.LTDC_VerticalSync = VSW-1;
/* 配置(HSW+HBP-1) */
LTDC_InitStruct.LTDC_AccumulatedHBP =HSW+HBP-1;
/* 配置(VSW+VBP-1) */
LTDC_InitStruct.LTDC_AccumulatedVBP = VSW+VBP-1;
/* 配置(HSW+HBP+有效像素宽度-1) */
LTDC_InitStruct.LTDC_AccumulatedActiveW = HSW+HBP+LCD_PIXEL_WIDTH-1;
/* 配置(VSW+VBP+有效像素高度-1) */
LTDC_InitStruct.LTDC_AccumulatedActiveH = VSW+VBP+LCD_PIXEL_HEIGHT-1;
/* 配置总宽度(HSW+HBP+有效像素宽度+HFP-1) */
LTDC_InitStruct.LTDC_TotalWidth =HSW+ HBP+LCD_PIXEL_WIDTH + HFP-1;
/* 配置总高度(VSW+VBP+有效像素高度+VFP-1) */
LTDC_InitStruct.LTDC_TotalHeigh =VSW+ VBP+LCD_PIXEL_HEIGHT + VFP-1;
LTDC_Init(<DC_InitStruct);
}
这一步要注意的就是X轴和Y轴,这个st7701,短轴是X轴,长轴是Y轴。
/* LCD Size (Width and Height) */
#define LCD_PIXEL_WIDTH ((uint16_t)320) //X轴
#define LCD_PIXEL_HEIGHT ((uint16_t)820) //Y轴
之后就是emwin的移植了,参考安富莱的裸机移植代码。
基本上都差不多,修改的地方如下:
/*
1. 显示屏的物理分辨率,驱动已经做了显示屏自适应,支持4.3寸,5寸和7寸屏
这里填写自适应显示屏中的最大分辨率。
*/
#define XSIZE_PHYS 320 //320
#define YSIZE_PHYS 820
uint16_t g_LcdHeight = YSIZE_PHYS; /* 显示屏分辨率-高度 */
uint16_t g_LcdWidth = XSIZE_PHYS; /* 显示屏分辨率-宽度 */
/*
4. 重定义图层数,对于STM32F429/439,用户可以选择一个图层或者两个图层,不支持三图层
(1). 设置GUI_NUM_LAYERS = 1时,即仅使用图层1时,默认触摸值是发送给图层1的。
(2). 设置GUI_NUM_LAYERS = 2时,即图层1和图层2都已经使能,此时图层2是顶层,
用户需要根据自己的使用情况设置如下两个地方。
a. 在bsp_touch.c文件中的函数TOUCH_InitHard里面设置参数State.Layer = 1,1就表示
给图层2发送触摸值。
b. 调用GUI_Init函数后,调用函数GUI_SelectLayer(1), 设置当前操作的是图层2。
*/
#undef GUI_NUM_LAYERS
#define GUI_NUM_LAYERS 1
/* 7. 配置图层1的颜色模式和分辨率大小 */
#define COLOR_MODE_0 _CM_RGB565
#define XSIZE_0 XSIZE_PHYS
#define YSIZE_0 YSIZE_PHYS
/* 8. 配置图层2的的颜色模式和分辨率大小 */
#define COLOR_MODE_1 _CM_RGB565
#define XSIZE_1 XSIZE_PHYS
#define YSIZE_1 YSIZE_PHYS
之后在初始化图层中:
/*
*********************************************************************************************************
* 函 数 名: _LCD_InitController
* 功能说明: LCD初始化
* 形 参: LayerIndex 选择图层0或者1
* 返 回 值: 无
*********************************************************************************************************
*/
static void _LCD_InitController(int LayerIndex)
{
.......
LTDC_Layer_InitStruct.LTDC_HorizontalStart = HBP + HSW;;
LTDC_Layer_InitStruct.LTDC_HorizontalStop = HSW+HBP+LCD_PIXEL_WIDTH-1;
LTDC_Layer_InitStruct.LTDC_VerticalStart = VBP + VSW;
LTDC_Layer_InitStruct.LTDC_VerticalStop = VSW+VBP+LCD_PIXEL_HEIGHT-1;
}
之后再测试一下:
/*
*********************************************************************************************************
* 函 数 名: MainTask
* 功能说明: GUI主函数
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
uint64_t i=0;
void MainTask(void)
{
GUI_TIMER_HANDLE hTimer;
GUI_Init();
//
/*
关于多缓冲和窗口内存设备的设置说明
1. 使能多缓冲是调用的如下函数,用户要在LCDConf_Lin_Template.c文件中配置了多缓冲,调用此函数才有效:
WM_MULTIBUF_Enable(1);
2. 窗口使能使用内存设备是调用函数:WM_SetCreateFlags(WM_CF_MEMDEV);
3. 如果emWin的配置多缓冲和窗口内存设备都支持,二选一即可,且务必优先选择使用多缓冲,实际使用
STM32F429BIT6 + 32位SDRAM + RGB565/RGB888平台测试,多缓冲可以有效的降低窗口移动或者滑动时的撕裂
感,并有效的提高流畅性,通过使能窗口使用内存设备是做不到的。
4. 所有emWin例子默认是开启三缓冲。
*/
//GUI_SetOrientation(0);
WM_MULTIBUF_Enable(1);
//LCD_SetDirection(2);
//i = GUI_SetOrientation(GUI_SWAP_XY);
GUI_SetOrientation(GUI_SWAP_XY | GUI_MIRROR_Y);
/*
触摸校准函数默认是注释掉的,电阻屏需要校准,电容屏无需校准。如果用户需要校准电阻屏的话,执行
此函数即可,会将触摸校准参数保存到EEPROM里面,以后系统上电会自动从EEPROM里面加载。
*/
//TOUCH_Calibration();
GUI_SetBkColor(0x000064c8);
GUI_Clear();
GUI_Delay(2000);
//GUI_SetBkColor(GUI_GRAY);
GUI_Clear();
GUI_Delay(2000);
GUI_SetColor(GUI_BLACK);
GUI_SetTextMode(GUI_TM_NORMAL);
GUI_SetFont(GUI_FONT_32B_ASCII);
GUI_DispStringHCenterAt("GUI_TM_NORMAL" , 160, 10);
GUI_Delay(1000);
hWin = Createtestwindows();
WM_EnableMemdev(hWin);
while(1)
{
i++;
//GUI_Delay(100);
GUI_Exec();
WINDOW_SetBkColor(hWin, 0x00FF0000);
GUI_Exec();
sys_timer_usDelay(1000000);
WINDOW_SetBkColor(hWin, GUI_BLACK);
GUI_Exec();
sys_timer_usDelay(1000000);
}
}
其中main.c如下
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_CRC, ENABLE);
sys_timer_init();
sys_timer_usDelay(1000);
SDRAM_Init();
//PhotomoveSdram();
/* LED 端口初始化 */
LED_GPIO_Config();
//SDRAM_Init();
/*初始化液晶屏*/
LCD_SPI_Init();
LCD_Init();
//LCD_LayerInit();
//LTDC_Cmd(ENABLE);
while(1)
{
MainTask();
}
}
卡壳的地方有:
1、spi初始化哪儿,SCL的空闲时钟。
2、emwin移植之后图像显示有问题,颜色显示不正确,后面通过测试RGB才发现,这个屏用的RGB565,线序与RGB888相比为:
RGB888 RGB565
R0-------无
R1-------无
R2-------无
R3-------R0
R4-------R1
R5-------R2
R6-------R3
R7-------R4
G0-------无
G1-------无
G2-------G0
G3-------G1
G4-------G2
G5-------G3
G6-------G4
G7-------G5
B0-------无
B1-------无
B2-------无
B3-------B0
B4-------B1
B5-------B2
B6-------B3
B7-------B4
3、测试中调用 IMAGE_SetDTA() 函数总是跑飞,调整一下堆栈大小: Stack_Size EQU 0x00001000
4、显示亮色图片对比鲜明的像素点不正常,不知道原因。