一、坐标系定义与符号约定
在捷联惯导中,涉及到多种坐标系,其中 惯性坐标系、地心地固坐标系、导航坐标系 的示意图如下:
下面给出常用的坐标系的定义
:
1)惯性坐标系(i 系):
以地球质心为原点, 轴指向地球自转轴, 轴位 于赤道面指向空间任意点, 轴与其构成右手系。
该坐标系不随地球自转而转动,
但是由于地球质心绕太阳公转以及太阳系绕银河系公转,因此,该系
不是绝对惯 性系,
然而这些影响十分微弱,低于惯导的噪声水平,
因而可以忽略不计,该系 可以认
为
是一个惯性系。
2)地心地固系(e 系):
与大地测量中的
ECEF
系一致
理解:某一时刻,载体在e系中的坐标 在 i 系的表达,可通过方向余弦矩阵(
Direction Cosine Matrix, DCM)
实现,其表达如下:
3)地理坐标系 (Geographic Coordinate System):
是使用三维球面来定义地球表面位置,以实现通过 经纬度 对地球表面点位引用的坐标系。
一个地理坐标系包括 角度测量单位、本初子午线和参考椭球体三部分。在球面系统中,水平线是等
纬度线或纬线。垂直线是等经度线或经线。地理坐标系依据其所选用的本初子午线、参考椭球的不
同而略有区别。地理坐标系可以确定地球上任何一点的位置。首先将地球抽象成一个规则的逼近原
始自然地球表面的椭球体,称为参考椭球体,然后在参考椭球体上定义一系列的经线和纬线构成经
纬网,从而达到通过经纬度来描述地表点位的目的。需要说明的是经纬地理坐标系不是平面坐标系,
因为度不是标准的长度单位,不可用其直接量测面积长度。
地理坐标系 与 地心地固系(e 系)之间的转换关系如下:

程序如下:
Eigen::MatrixXd llh2ecef(Eigen::MatrixXd data) // transform the llh to ecef
{
Eigen::MatrixXd ecef; // the ecef for output
ecef.resize(3, 1);
double a = 6378137.0;
double b = 6356752.314;
double n, Rx, Ry, Rz;
double lon = (double)data(0) * 3.1415926 / 180.0; // lon to radis
double lat = (double)data(1) * 3.1415926 / 180.0; // lat to radis
double alt = (double)data(2); // altitude
n = a * a / sqrt(a * a * cos(lat) * cos(lat) + b * b * sin(lat) * sin(lat));
Rx = (n + alt) * cos(lat) * cos(lon);
Ry = (n + alt) * cos(lat) * sin(lon);
Rz = (b * b / (a * a) * n + alt) * sin(lat);
ecef(0) = Rx; // return value in ecef
ecef(1) = Ry; // return value in ecef
ecef(2) = Rz; // return value in ecef
return ecef;
/**************for test purpose*************************
Eigen::MatrixXd llh;
llh.resize(3, 1);
Eigen::MatrixXd ecef;
ecef.resize(3, 1);
llh(0) = 114.1772621294604;
llh(1) = 22.29842880200087;
llh(2) = 58;
ecef = llh2ecef(llh);
cout << "ecef ->: " << ecef << "\n";
*/
}
/*
function: ecef to llh
input: ecef (Matrix3d)
output: llh (Matrix3d)
*/
Eigen::MatrixXd ecef2llh(Eigen::MatrixXd data) // transform the ecef to llh
{
Eigen::MatrixXd llh; // the ecef for output
double pi = 3.1415926; // pi
llh.resize(3, 1);
double x = data(0); // obtain ecef
double y = data(1);
double z = data(2);
double x2 = pow(x, 2);
double y2 = pow(y, 2);
double z2 = pow(z, 2);
double a = 6378137.0000; //earth radius in meters
double b = 6356752.3142; // earth semiminor in meters
double e = sqrt(1 - (b / a) * (b / a));
double b2 = b*b;
double e2 = e*e;
double ep = e*(a / b);
double r = sqrt(x2 + y2);
double r2 = r*r;
double E2 = a * a - b*b;
double F = 54 * b2*z2;
double G = r2 + (1 - e2)*z2 - e2*E2;
double c = (e2*e2*F*r2) / (G*G*G);
double s = (1 + c + sqrt(c*c + 2 * c));
s = pow(s, 1 / 3);
double P = F / (3 * ((s + 1 / s + 1)*(s + 1 / s + 1)) * G*G);
double Q = sqrt(1 + 2 * e2*e2*P);
double ro = -(P*e2*r) / (1 + Q) + sqrt((a*a / 2)*(1 + 1 / Q) - (P*(1 - e2)*z2) / (Q*(1 + Q)) - P*r2 / 2);
double tmp = (r - e2*ro)*(r - e2*ro);
double U = sqrt(tmp + z2);
double V = sqrt(tmp + (1 - e2)*z2);
double zo = (b2*z) / (a*V);
double height = U*(1 - b2 / (a*V));
double lat = atan((z + ep*ep*zo) / r);
double temp = atan(y / x);
double long_;
if (x >= 0)
long_ = temp;
else if ((x < 0) && (y >= 0))
long_ = pi + temp;
else
long_ = temp - pi;
llh(0) = (long_)*(180 / pi);
llh(1) = (lat)*(180 / pi);
llh(2) = height;
return llh;
/**************for test purpose*************************
Eigen::MatrixXd ecef;
ecef.resize(3, 1);
Eigen::MatrixXd llh;
llh.resize(3, 1);
ecef(0) = -2418080.9387265667;
ecef(1) = 5386190.3905763263;
ecef(2) = 2405041.9305451373;
llh = ecef2llh(ecef);
cout << "llh ->: " << llh << "\n";
*/
}
4)当地水平坐标系(L 系):
原点位于载体质心, 轴沿参考椭球卯酉圈 指向东 E
, 轴沿参考椭球子午线指向北 N
, 轴沿参考椭
球法线指向天 U
,
从而形成 ENU
坐标系
5)导航坐标系(n 系):
是惯性导航算法的基本参考系,运动物体在导航坐标系内进行位置,速度,姿态确 定,可选取 e
系
或
L
系做为导航系。
在
e
系内导航,可以直接确定地心地固系下 的导航参数,
便于和 GNSS
等大地
测量手段相结合,且动态模型简单,但不
利于 本质规律的研究。而在 L
系下导航,物理意义明确,
便于理论分析和误差规律探 寻,利于内部控制,
但动态模型复杂,
且不能直接与 GNSS
等大地测量
手段相结 合。对于组合导航解算,应选用 e
系,而对于理论分析,应选用
L
系;
一般采用当地水平坐标系 L,采用
NED 坐标系作为导航坐标系
6)载体坐标系(b 系):
捷联惯导硬件内部定义了坐标系,其原点一般位于 硬件中心,而惯性元件安装在三个正交方向上形成
XYZ
轴。
将捷联惯导安装在 载体上后,
惯导硬件的坐标系就成为载体的坐标系,两者固联在一起。
一般将 Z 轴朝上,
Y
轴朝前进方向,
X
轴沿前进方向朝右


7)平台坐标系(p 系)、
在平台式惯导中,惯导通过自身调节,始终维持为 一个水平指北平台,这个就是 p
系,但由于各种
误差的影响,
p
系与真实的
L
系 并不重合,
两者存在一个失准角 。在捷联惯导中,这种平台由计算
平台所取代,计算平台由
b 系转向
n 的姿态矩阵
来维持,由于解算误差的存在,所计算得
到的是存
在失准角的姿态矩阵 ,
与 存在一个失准角 。
8)计算机坐标系(c 系):
L
系是由实际经纬度确定的当地坐标系,而惯导 自身可以解算出带有误差的经纬度 和 ,由 和 确定的
当地坐标
系称为计 算机坐标系。
c
系实质是模型简化过程中衍生出来的一个坐标系,并没有具体的
物理解释,在后续导
出 角误差模型时会详细说明。
在推导惯导误差模型时,
清晰自明的符号约定是十
分重要的,符号的混淆与 定义
不一致往往导致很多文献结果的不一致,
在相互引用时不能自洽。
二、坐标系旋转
描述两个坐标系之间的旋转关系可以采用欧拉角、旋转矩阵、四元数和旋转 矢量四种数学工具
[57]
。
欧拉角
和旋转矩阵有密切关系,
两者统称为转角系统。
转角系统定义有如下 3 个要素:1)旋转顺序;
2
)欧拉角的
符号与域值定义;
3
)奇点问题。 转角系统定义如图 3.2
:

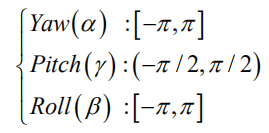
旋转顺序为 Z -> X -> Y ,第一次绕 Z 轴旋转
 ,称为航向角 Yaw,第二次 X 绕 轴旋转
,称为航向角 Yaw,第二次 X 绕 轴旋转
 ,称为俯仰角 Pitch,
,称为俯仰角 Pitch,
第三次绕 Y 轴旋转
 ,称为翻滚角 Roll。
得 到的单轴旋转矩阵分别为:
,称为翻滚角 Roll。
得 到的单轴旋转矩阵分别为:

欧拉角的值域为:
三、程序
大地坐标系(WGS-84)、地心地固坐标系(ECEF) 与 东北天坐标系(ENU)的相互转换C语言代码
Eigen::MatrixXd ecef2enu(Eigen::MatrixXd originllh, Eigen::MatrixXd ecef) // transform the ecef to enu
{
double pi = 3.1415926; // pi
double DEG2RAD = pi / 180.0;
double RAD2DEG = 180.0 / pi;
Eigen::MatrixXd enu; // the enu for output
enu.resize(3, 1); // resize to 3X1
Eigen::MatrixXd oxyz; // the original position
oxyz.resize(3, 1); // resize to 3X1
double x, y, z; // save the x y z in ecef
x = ecef(0);
y = ecef(1);
z = ecef(2);
double ox, oy, oz; // save original reference position in ecef
oxyz = llh2ecef(originllh);
ox = oxyz(0); // obtain x in ecef
oy = oxyz(1); // obtain y in ecef
oz = oxyz(2); // obtain z in ecef
double dx, dy, dz;
dx = x - ox;
dy = y - oy;
dz = z - oz;
double lonDeg, latDeg, _; // save the origin lon alt in llh
lonDeg = originllh(0);
latDeg = originllh(1);
double lon = lonDeg * DEG2RAD;
double lat = latDeg * DEG2RAD;
//save ENU
enu(0) = -sin(lon) * dx + cos(lon) * dy;
enu(1) = -sin(lat) * cos(lon) * dx - sin(lat) * sin(lon) * dy + cos(lat) * dz;
enu(2) = cos(lat) * cos(lon) * dx + cos(lat) * sin(lon) * dy + sin(lat) * dz;
return enu;
/**************for test purpose*****suqare distance is about 37.4 meters********************
Eigen::MatrixXd llh; //original
llh.resize(3, 1);
llh(0) = 114.1775072541416;
llh(1) = 22.29817969722738;
llh(2) = 58;
Eigen::MatrixXd ecef;
ecef.resize(3, 1);
ecef(0) = -2418080.9387265667;
ecef(1) = 5386190.3905763263;
ecef(2) = 2405041.9305451373;
Eigen::MatrixXd enu;
enu.resize(3, 1);
enu = ecef2enu(llh, ecef);
cout << "enu ->: " << enu << "\n";
*/
}
/*
function: ecef to enu
input: original llh, and current ecef (Matrix3d)
output: enu (Matrix3d)
*/
Eigen::MatrixXd enu2ecef(Eigen::MatrixXd originllh, Eigen::MatrixXd enu) // transform the ecef to enu
{
// enu to ecef
double e = enu(0);
double n = enu(1);
double u = enu(2);
double lon = (double)originllh(0) * D2R;
double lat = (double)originllh(1) * D2R;
Eigen::MatrixXd oxyz; // the original position
oxyz.resize(3, 1); // resize to 3X1
oxyz = llh2ecef(originllh);
double ox = oxyz(0);
double oy = oxyz(1);
double oz = oxyz(2);
oxyz(0) = ox - sin(lon) * e - cos(lon) * sin(lat) * n + cos(lon) * cos(lat) * u;
oxyz(1) = oy + cos(lon) * e - sin(lon) * sin(lat) * n + cos(lat) * sin(lon) * u;
oxyz(2) = oz + cos(lat) * n + sin(lat) * u;
return oxyz;
}
感谢:大地坐标系(WGS-84)、地心地固坐标系(ECEF)与东北天坐标系(ENU)的相互转换C语言代码分享_Schroeder1_新浪博客
