MATLAB机器人工具箱(一)
前言:
在开始做机器人仿真之前,我了解了一系列机器人仿真软件(包括Matlab、Webots、Gazebo、V-rep、Adams、Simbad、Morse等)的适用场景、使用方法等资料,决定从最经典的Matlab入手,快速搭建机器人平台进行路径规划与控制。
这里记录一下我的学习和使用过程,以及遇到的坑。我的版本是R2018a。
一、添加机器人工具箱——RTB工具箱:
方法一:
1.下载rvctools文件包,放在一个自己知道的目录下(任意路径都是可以的,但是为了方便管理,一般都安装在toolbox),然后“设置路径”里面添加并保存。

2.在命令中输入statrup_rvc,之后会看到机器人工具箱启动成功。

3.最后在命令行中输入rtbdemo命令,会跳出一个操作界面。
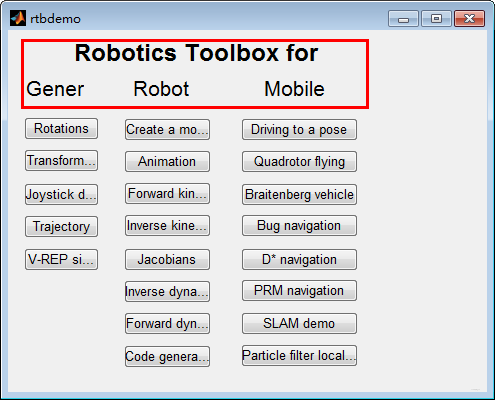
但是这么做也有一个问题,就是每次打开都要重新通过statrup_rvc命令运行rvctools文件包,目前还没找到好的解决方法,欢迎大家提点。
如图所示:左边一列是通用函数的例子(如:旋转,平移,轨迹等);中间主要是机械臂的基础函数,可以快速构建一个机器人;右边为移动机器人的一些历程。大家可以自己试试看。
方法二:
这里我看到别人直接下载RTB工具箱(注意版本号)并安装,然后输入rbtdemo命令运行,但我试了不太行,大家也可以试试看。
错误合集:
1.“错误使用 eval,未定义…”:
在导入多体物理库时通过“设置路径”添加了toolbox里面的“Simscape-Multibody-Contact-Forces-Library-18.1.4.1”,结果就出现了如下错误:
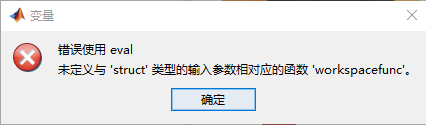
甚至有的人安装好Matlab以后,什么操作也不做,仅仅是将软件打开就会有这样的报错。
解决方法一:(很多人用这种方法奏效了)
但对我来说似乎没什么用。
解决方法二:
先把“设置路径”恢复成默认(之前设置的就没有了,不知道有没有更好的方法),把新的工具箱a解压到toolbox目录下,然后用addpath把toolbox的路径添加到matlab的搜索路径中,最后用which xxx.m来检验是否可以访问里面的xxx.m文件。如果能够显示新设置的路径,则表明报错解决,该工具箱可以使用了。示例如下:
>> addpath E:\MATLAB\R2018a\toolbox
%输入工具箱名称,此时一般会返回该工具箱的说明,也就是mathmodl
>> help mathmodl路径下content.m中的内容
%在命令行中输入如下,此时会返回mathmodl路径下所有的文件
>> what mathmodl
%再到mathmodl中随便找一个不与Matlab中重名的函数,比如xxx.m,在命令行中输入
>> which xxx.m
E:\MATLAB\rvctools\xxx.m
2.Matlab启动过慢:
这绝对是困扰我很久的一个问题,一度让我怀疑自己设备有问题(虽然确实慢)。
如果你的matlab停留在“正在初始化…”这个界面长达几分钟甚至更久,试试下面的方法(据说是最近几代新版本的共性问题):
启动慢的原因是软件查找授权文件时间太长,我们定位到license文件,找到license文件的绝对路径(我的就在一级安装文件下),删除这个文件license_server.lic(不同版本的名字是不一样的!大家试一下)。
剩下的文件如图:

然后速度瞬间提升了hhh。
3.Matlab启动的时候给出警告:
Warning: MATLAB Toolbox Path Cache is out of date and is not being used. Type 'help toolbox_path_cache' for more info.To get started, select MATLAB Help or Demos from the Help menu.
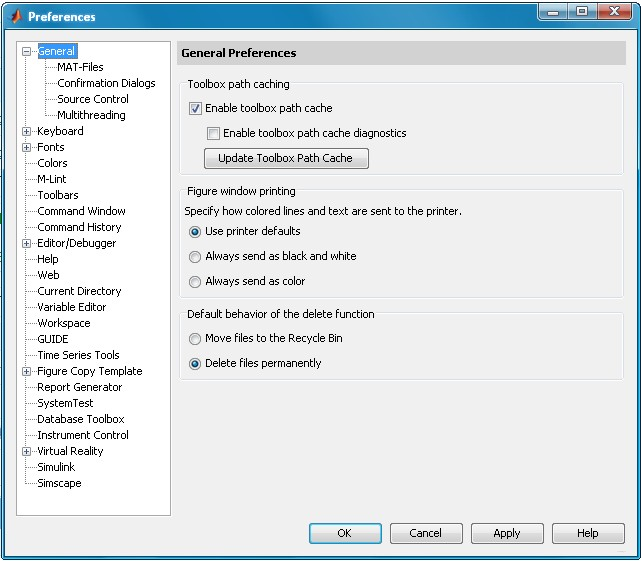
这个问题式因为安装工具箱之后没有更新缓存,解决方法:
File——>Preferences——>General——>选中enable toolbox path cache——>点击updata toolbox path cache
二、使用机器人工具箱创建双足机器人:
1.复现双足机器人:
原博:JianRobSim
%% 主代码
%% 说明:我用了原博的代码腿的位置不对,troty(-pi/2)改成了troty(pi/2)对了
%% creat walking robot model
clear all
%leg length
L1=0.15;L2=0.25;
%form a leg
leg=SerialLink([0, 0, 0, pi/2; 0, 0, L1, 0; 0, 0, -L2, 0 ],...
'name', 'leg', 'base', eye(4,4),'tool', ...
troty(pi/2)*trotx(-pi/2)*trotz(-pi/2),'offset', [pi/2 0 -pi/2]);
%% diplay the leg
%body wide and length
W = 0.2; L = 0.2;
%form a body
legs(1) = SerialLink(leg, 'name', 'leg1','base', transl(0, 0, -0.05)*trotz(pi/2)); %*trotz(pi/2)
legs(2) = SerialLink(leg, 'name', '.', 'base', transl(0, -W, -0.05)*trotz(pi/2));
% create a fixed size axis for the robot, and set z positive downward
clf;
axis([-0.3 0.25 -0.6 0.4 -0.19 0.45]); set(gca,'Zdir', 'reverse')
hold on
legs(1).plot([0 pi/3 -pi/2.5],'nobase','noshadow','nowrist');%leg pose
legs(2).plot([0 pi/1.8 -pi/2.5],'nobase','noshadow','nowrist');
%plot body
plotcube([0.1 0.2 -0.12],[ -0.05 -0.2 0],1,[1 1 0]);
%% simulate moving
for i=0.01:0.02:0.4
legs(1).plot([0 pi/3+i -pi/2.5-i],'nobase','noshadow');%leg pose
legs(2).plot([0 pi/1.8-i -pi/2.5+i],'nobase','noshadow');
end
% 身体控制器
function plotcube(varargin)
% PLOTCUBE - Display a 3D-cube in the current axes
%
% PLOTCUBE(EDGES,ORIGIN,ALPHA,COLOR) displays a 3D-cube in the current axes
% with the following properties:
% * EDGES : 3-elements vector that defines the length of cube edges
% * ORIGIN: 3-elements vector that defines the start point of the cube
% * ALPHA : scalar that defines the transparency of the cube faces (from 0
% to 1)
% * COLOR : 3-elements vector that defines the faces color of the cube
%
% Example:
% >> plotcube([5 5 5],[ 2 2 2],.8,[1 0 0]);
% >> plotcube([5 5 5],[10 10 10],.8,[0 1 0]);
% >> plotcube([5 5 5],[20 20 20],.8,[0 0 1]);
%% plotcube函数 长宽高 三维空间起点 颜色属性
% Default input arguments
inArgs = { ...
[10 56 100] , ... % Default edge sizes (x,y and z)
[10 10 10] , ... % Default coordinates of the origin point of the cube
.7 , ... % Default alpha value for the cube's faces
[1 0 0] ... % Default Color for the cube
};
% Replace default input arguments by input values
inArgs(1:nargin) = varargin;
% Create all variables
[edges,origin,alpha,clr] = deal(inArgs{:});
XYZ = { ...
[0 0 0 0] [0 0 1 1] [0 1 1 0] ; ...
[1 1 1 1] [0 0 1 1] [0 1 1 0] ; ...
[0 1 1 0] [0 0 0 0] [0 0 1 1] ; ...
[0 1 1 0] [1 1 1 1] [0 0 1 1] ; ...
[0 1 1 0] [0 0 1 1] [0 0 0 0] ; ...
[0 1 1 0] [0 0 1 1] [1 1 1 1] ...
};
XYZ = mat2cell(...
cellfun( @(x,y,z) x*y+z , ...
XYZ , ...
repmat(mat2cell(edges,1,[1 1 1]),6,1) , ...
repmat(mat2cell(origin,1,[1 1 1]),6,1) , ...
'UniformOutput',false), ...
6,[1 1 1]);
cellfun(@patch,XYZ{1},XYZ{2},XYZ{3},...
repmat({clr},6,1),...
repmat({'FaceAlpha'},6,1),...
repmat({alpha},6,1)...
);
% view(3);
在这个项目的最后,博主贴了一个simscape的仿真结果,确实流畅度高了很多。所以我的下一步学习计划就是simscape~
2.复现机械臂:
参考博主,具体讲解可以点进去看。
clear ; clc; close all;
% 机器人各连杆DH参数
d1 = 0;
d2 = 86;
d3 = -92;
% 由于关节4为移动关节,故d4为变量,theta4为常量
theta4 = 0;
a1 = 400;
a2 = 250;
a3 = 0;
a4 = 0;
alpha1 = 0 / 180 * pi;
alpha2 = 0 / 180 * pi;
alpha3 = 180 / 180 * pi;
alpha4 = 0 / 180 * pi;
% 定义各个连杆,默认为转动关节
% theta d a alpha
L(1)=Link([ 0 d1 a1 alpha1]); L(1).qlim=[-pi,pi];
L(2)=Link([ 0 d2 a2 alpha2]); L(2).qlim=[-pi,pi]; L(2).offset=pi/2;
L(3)=Link([ 0 d3 a3 alpha3]); L(3).qlim=[-pi,pi];
% 移动关节需要特别指定关节类型--jointtype
L(4)=Link([theta4 0 a4 alpha4]); L(4).qlim=[0,180]; L(4).jointtype='P';
% 把上述连杆“串起来”
Scara=SerialLink(L,'name','Scara');
% 定义机器人基坐标和工具坐标的变换
Scara.base = transl(0 ,0 ,305);
Scara.tool = transl(0 ,0 ,100);
Scara.teach(); %机器人示教界面
% 绘制动画
figure
joint(: , 1) = linspace(pi/6,pi/2,100);
joint(: , 2) = linspace(0,pi/4,100);
joint(: , 3) = linspace(pi/3,pi/2,100);
joint(: , 4) = linspace(0,160,100);
filename = 'demo.gif';
for i = 1:length(joint)
pause(0.01)
Scara.plot(joint(i,:));
f = getframe(gcf);
imind = frame2im(f);
[imind,cm] = rgb2ind(imind,256);
if i == 1
imwrite(imind,cm,filename,'gif', 'Loopcount',inf,'DelayTime',0.1);
else imwrite(imind,cm,filename,'gif','WriteMode','append','DelayTime',0.1);
end
end
接下来有一个改进DH方法的代码,其实主要是 'modified’参数的改变:
clear ; clc; close all;
% 机器人各连杆参数值
d1 = 670;
d2 = 0;
d3 = 0;
d4 = 1280;
d5 = 0;
d6 = 215;
a1 = 0;
a2 = 312;
a3 = 1075;
a4 = 225;
a5 = 0;
a6 = 0;
alpha1 = 0 / 180 * pi;
alpha2 = -90 / 180 * pi;
alpha3 = 0 / 180 * pi;
alpha4 = -90 / 180 * pi;
alpha5 = 90 / 180 * pi;
alpha6 = -90 / 180 * pi;
% 建立连杆DH参数(修正的DH)
L(1)=Link([0 d1 a1 alpha1], 'modified'); L(1).qlim=[-pi,pi];
L(2)=Link([0 d2 a2 alpha2], 'modified'); L(2).qlim=[-pi,pi];L(2).offset = -pi/2;
L(3)=Link([0 d3 a3 alpha3], 'modified'); L(3).qlim=[-pi,pi];
L(4)=Link([0 d4 a4 alpha4], 'modified'); L(4).qlim=[-pi,pi];
L(5)=Link([0 d5 a5 alpha5], 'modified'); L(5).qlim=[-pi,pi];
L(6)=Link([0 d6 a6 alpha6], 'modified'); L(6).qlim=[-pi,pi];
% 定义机器人
FANUC=SerialLink(L(1:6),'name','FANUC');
FANUC.tool = transl(0,0,100);
FANUC.teach();
为了搞清楚standard DH和modified DH,我看了好久的资料,简单谈一下我的理解。
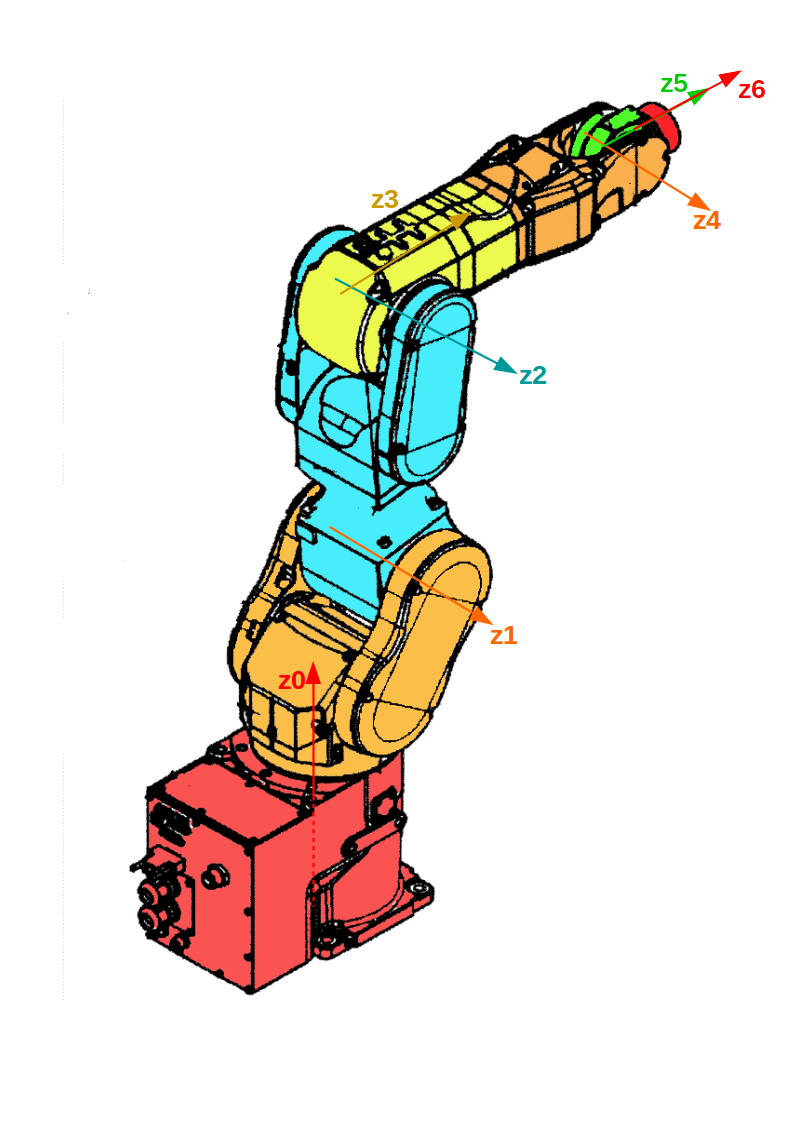
以这张图(来源)为例,标准DH方法是在传动轴上(远端,如图)建立坐标系的,所以 z 轴(为了避免麻烦,只画z轴)建立在连杆远离基座一侧的那个轴上;改进DH方法则会把坐标系建立在固定轴上(近端)。
这两种建系方法对于平常的普通机械臂是没有区别的,在matlab里的体现也只是修改“modified”参数的问题,最多是得到的转换矩阵结果不同。但是对于delta、Atrias这样的并联机器人,或者树状、轮式结构机器人来说,在进行逆运算时,如果回推原点大于1个,就会出现混乱。
delta机器人
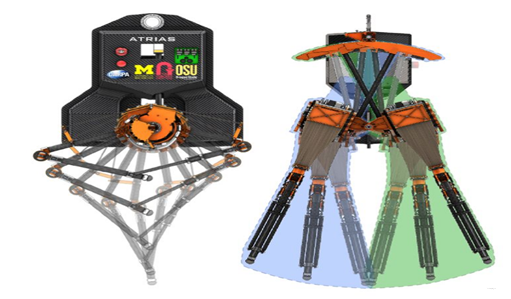
Atrias机器人