[
a
11
a
12
a
13
a
21
a
22
a
23
]
[
b
11
b
12
b
21
b
22
b
31
b
32
]
=
[
a
11
b
11
+
a
12
b
21
+
a
13
b
31
a
11
b
12
+
a
12
b
22
+
a
13
b
32
a
21
b
11
+
a
22
b
21
+
a
23
b
31
a
21
b
12
+
a
22
b
22
+
a
23
b
32
]
\left[ \begin{matrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \end{matrix} \right] \left[ \begin{matrix} b_{11} & b_{12} \\ b_{21} & b_{22} \\ b_{31} & b_{32} \end{matrix} \right]= \left[ \begin{matrix} a_{11}b_{11} +a_{12}b_{21}+a_{13}b_{31}& a_{11}b_{12} +a_{12}b_{22}+a_{13}b_{32} \\ a_{21}b_{11} +a_{22}b_{21}+a_{23}b_{31}& a_{21}b_{12} +a_{22}b_{22}+a_{23}b_{32} \end{matrix} \right]
[a11a21a12a22a13a23]⎣⎡b11b21b31b12b22b32⎦⎤=[a11b11+a12b21+a13b31a21b11+a22b21+a23b31a11b12+a12b22+a13b32a21b12+a22b22+a23b32]
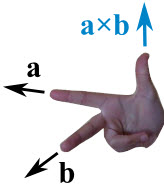
仅在三维空间中定义。
a
⃗
X
b
⃗
=
∣
a
∣
∗
∣
b
∣
s
i
n
(
θ
)
n
⃗
\vec{a} X \vec{b} =|a|*|b|sin(\theta)\vec{n}
aXb=∣a∣∗∣b∣sin(θ)n
∣
a
∣
和
∣
b
∣
分
别
为
向
量
a
⃗
和
b
⃗
的
长
度
,
θ
为
a
⃗
和
b
⃗
的
夹
角
,
|a|和|b|分别为向量\vec{a}和\vec{b}的长度,\theta为\vec{a}和\vec{b}的夹角,
∣a∣和∣b∣分别为向量a和b的长度,θ为a和b的夹角,
n
⃗
为
单
位
向
量
,
方
向
为
垂
直
于
a
⃗
和
b
⃗
的
平
面
,
且
在
这
两
条
向
量
的
右
边
。
\vec{n}为单位向量,方向为垂直于\vec{a}和\vec{b}的平面,且在这两条向量的右边。
n为单位向量,方向为垂直于a和b的平面,且在这两条向量的右边。 由右手规则判断: With your right-hand, point your index finger along vector a, and point your middle finger along vector b: the cross product goes in the direction of your thumb.
a
⃗
X
b
⃗
\vec{a} X \vec{b}
aXb与
b
⃗
X
a
⃗
\vec{b} X \vec{a}
bXa长度相等,方向相反。
7,dot product(scalar product)点积
点积是标量,是一个数字。
a
⃗
.
b
⃗
=
∣
a
∣
∗
∣
b
∣
c
o
s
(
θ
)
\vec{a}.\vec{b}=|a|*|b|cos(\theta)
a.b=∣a∣∗∣b∣cos(θ)
∣
a
∣
和
∣
b
∣
分
别
为
向
量
a
⃗
和
b
⃗
的
长
度
,
θ
为
a
⃗
和
b
⃗
的
夹
角
。
|a|和|b|分别为向量\vec{a}和\vec{b}的长度,\theta为\vec{a}和\vec{b}的夹角。
∣a∣和∣b∣分别为向量a和b的长度,θ为a和b的夹角。 在二维空间和多维空间,此计算都成立。
8,eigenvectors(特征向量)和eigenvalues(特征值)
给定一个矩阵A,如果经过
v
⃗
这
个
线
性
变
换
后
,
得
到
的
新
向
量
仍
与
v
⃗
\vec{v}这个线性变换后,得到的新向量仍与\vec{v}
v这个线性变换后,得到的新向量仍与v在同一条直线上,即:
A
v
⃗
=
λ
v
⃗
A\vec{v}=\lambda\vec{v}
Av=λv, 则称
v
⃗
为
矩
阵
A
的
特
征
向
量
,
λ
为
矩
阵
A
的
特
征
值
\vec{v}为矩阵A的特征向量,\lambda为矩阵A的特征值
v为矩阵A的特征向量,λ为矩阵A的特征值。
方阵才有特征值和特征向量的概念,一个n阶方阵要么没有特征向量,要么有n个特征向量。
9,矩阵中常用的数学符号
9.1
A
−
1
A^{-1}
A−1 叫法:The inverse matrix of the matrix A、逆矩阵、导数矩阵。 仅针对方阵而言,并且方阵的行列式不为0时才有逆矩阵。 定义: 如果A为方阵,且
A
A
−
1
=
I
,
AA^{-1}=I,
AA−1=I,则
A
−
1
称
为
A
的
逆
矩
阵
(
其
中
I
为
单
位
矩
阵
)
。
A^{-1}称为A的逆矩阵(其中I为单位矩阵)。
A−1称为A的逆矩阵(其中I为单位矩阵)。
有如下一个2X2方阵:
A
=
[
a
11
a
12
a
21
a
22
]
A= \left[ \begin{matrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{matrix} \right]
A=[a11a21a12a22] 则:
A
−
1
=
1
a
11
a
22
−
a
12
a
21
[
a
22
−
a
12
−
a
21
a
11
]
=
1
∣
A
∣
[
a
22
−
a
12
−
a
21
a
11
]
A^{-1}=\frac{1}{a_{11}a_{22}-a_{12}a_{21}} \left[ \begin{matrix} a_{22} & -a_{12} \\ -a_{21} & a_{11} \end{matrix} \right]=\frac{1}{|A|} \left[ \begin{matrix} a_{22} & -a_{12} \\ -a_{21} & a_{11} \end{matrix} \right]
A−1=a11a22−a12a211[a22−a21−a12a11]=∣A∣1[a22−a21−a12a11] 其中|A|为方阵A的行列式。
性质: 设C=AB(显然A和B为同纬度的方阵), 则
B
=
A
−
1
A
B
=
A
−
1
C
B=A^{-1}AB=A^{-1}C
B=A−1AB=A−1C
A
=
A
B
B
−
1
=
C
B
−
1
A=ABB^{-1}=CB^{-1}
A=ABB−1=CB−1 因此
C
=
A
B
=
C
B
−
1
A
−
1
C
C=AB=CB^{-1}A^{-1}C
C=AB=CB−1A−1C, 因此
C
B
−
1
A
−
1
=
I
CB^{-1}A^{-1}=I
CB−1A−1=I(I为单位矩阵) 因此
B
−
1
A
−
1
=
C
−
1
=
(
A
B
)
−
1
B^{-1}A^{-1}=C^{-1}=(AB)^{-1}
B−1A−1=C−1=(AB)−1
9.2
A
T
A^T
AT 矩阵A的转置矩阵,即将行和列互换。
9.3
A
∗
A^*
A∗ 叫法:complex conjugated matrix、复共轭矩阵 若
(
A
∗
)
i
,
j
=
A
i
,
j
ˉ
(A^*)_{i,j}=\bar{A_{i,j}}
(A∗)i,j=Ai,jˉ,(其中
(
.
)
i
,
j
为
矩
阵
第
i
行
第
j
列
的
元
素
,
(
.
)
ˉ
表
示
标
量
的
复
共
轭
。
(.)_{i,j}为矩阵第i行第j列的元素,\bar{(.)}表示标量的复共轭。
(.)i,j为矩阵第i行第j列的元素,(.)ˉ表示标量的复共轭。) 则称
A
∗
A^*
A∗为A的复共轭矩阵
9.3
A
H
(
量
子
力
学
中
用
A
†
表
示
)
A^H(量子力学中用A^\dag 表示)
AH(量子力学中用A†表示) 叫法:Transposed and complex conjugated matrix、共轭转置、伴随矩阵 若
(
A
∗
)
i
,
j
=
A
j
,
i
ˉ
(A^*)_{i,j}=\bar{A_{j,i}}
(A∗)i,j=Aj,iˉ,(其中
(
.
)
i
,
j
为
矩
阵
第
i
行
第
j
列
的
元
素
,
(
.
)
ˉ
表
示
标
量
的
复
共
轭
。
(.)_{i,j}为矩阵第i行第j列的元素,\bar{(.)}表示标量的复共轭。
(.)i,j为矩阵第i行第j列的元素,(.)ˉ表示标量的复共轭。) 也写作:
(
A
∗
)
=
(
A
ˉ
)
T
=
A
T
ˉ
(A^*)=(\bar{A})^T=\bar{A^T}
(A∗)=(Aˉ)T=ATˉ 则称
A
∗
A^*
A∗为A的共轭转置矩阵
9.4
A
+
A^+
A+ 叫法:The pseudo inverse matrix of the matrix A、伪逆(广义的逆矩阵)。 如果没有特殊说明,矩阵的伪逆就是指摩尔-彭若斯广义逆。