目录
一、查询版本
二、配置Ubuntu软件库
三、安装
1、设置安装源和密钥
2、更新可用软件包列表
问题
问题
3、安装
4、初始化
问题
5、更新
6、添加环境变量
7、安装rosinstall
8、安装catkin编译器
9、实例测试
参考文章
本文基于Ubuntu18.04从零开始搭建orb slam3及数据集测试一文中的环境继续搭建。
一、查询版本
lsb_release -a
不同版本的Ubuntu对应不同版本的ros,注意安装的时候要对应清楚。
| Ubuntu |
ROS |
DATE |
| 14.04 LTS |
indigo lgloo |
2014.7 |
| 16.04 LTS |
Kinetic Kame |
2016.3 |
| 18.04 LTS |
Melodic Morenia |
2018.3 |
| 20.04 LTS |
Noetic Ninjemys |
2020.3 |
| Foxy Fitzroy |
2020.6 |
| Galactic Geochelone |
2021.3 |
| Humble Hawksbill |
2022.3 |
| 22.04 LTS |
Humble Hawksbill |
2022.3 |
| Iron Irwini |
2023.3 |
Noetic Ninjemys 是ROS1的最后一个版本,以后的ROS都是ROS2,官方ROS1不支持Ubuntu22.04版本了
二、配置Ubuntu软件库
打开软件和更新

在弹出页面勾选 main , restricted , universe 和 multiverse

三、安装
1、设置安装源和密钥
添加安装源(建议用清华的)
#国内安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
#清华安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

2、更新可用软件包列表
sudo apt update
如果安装的是国内安装源,会出现一些error,比较麻烦
问题:
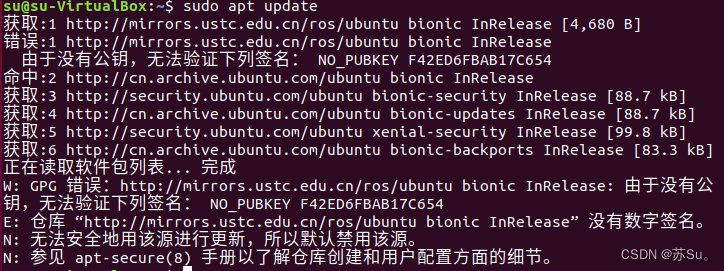
解决办法:
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv 9165938D90FDDD2E
问题:

原因:口令错误,没办法连接服务器
解决办法:换个安装源
解决完以后重新更新
3、安装
sudo apt-get install ros-melodic-desktop-full
4、初始化
sudo apt install python-rosdep
sudo rosdep init
问题:

解决办法:
cd /etc
sudo gedit hosts
打开一个文本文档,在末尾加上:
151.101.84.133 raw.githubusercontent.com
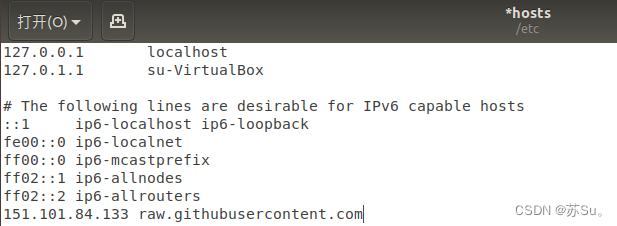
保存并关闭,然后继续初始化
cd ..
sudo rosdep init

初始化成功
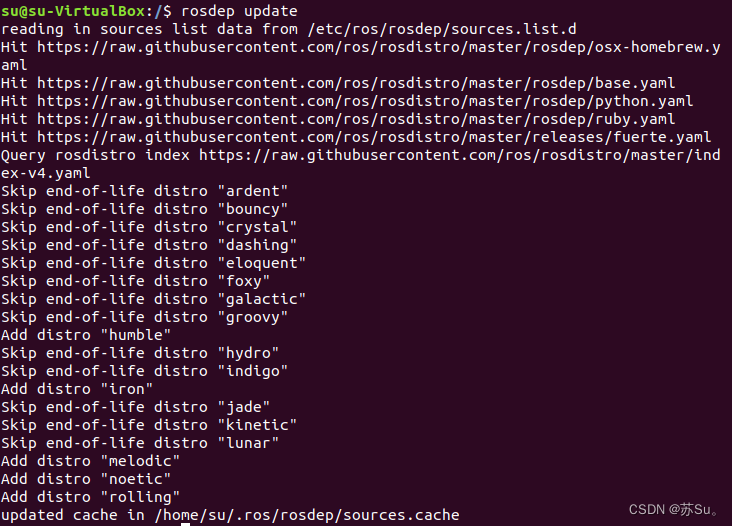
5、更新
rosdep update
由于网络不稳定可能会更新失败,多试几次就好了
6、添加环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
7、安装rosinstall
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
8、安装catkin编译器
sudo apt-get install ros-melodic-catkin python-catkin-tools
9、实例测试
打开终端快捷键:ctrl+alt+T
在第一个终端输入:
roscore
维持这个界面不要关,快捷键打开第二个终端输入:
rosrun turtlesim turtlesim_node
可视化界面不要关,快捷键打开第三个终端输入:
rosrun turtlesim turtle_teleop_key
此时就可以用键盘方向键控制乌龟移动了,注意当前窗口选择第三个终端,而不是选择可视化界面
如果乌龟可以顺利移动,说明安装成功
参考文章
ubuntu18.04安装ros-melodic(详细有图,绝对能安装成功)
Ubuntu18.04安装ROS Melodic(详细,亲测安装完成,有清晰的截图步骤)
ROS学习笔记-1