分析及主流芯片方案概述智能驾驶已经成为中国用户买车时首选的配置之一,从L0到L2++的整个产品布局,已经是车厂卖车时候的重点宣传点,智能驾驶不同于自动驾驶,无论是法律法规和产品定义都有着明确且清晰的定义。用户本身智能驾驶产品的需求也各不相同,寻找新的智能驾驶(辅助驾驶)功能是车厂急切的关注点,在高速/高架的辅助驾驶产品纷纷落地后,城市道路的辅助驾驶已提上日程,目前重点关注的解决方案是Mobileye的EyeQ6/英伟达的Orin和Thor/地平线J5/黑芝麻的A1000,还有高通的Snapdragon Ride FLEX 8540芯片相关Demo也已经面市,后续五大解决方案各分天下,面临着降低成本的要求,国产芯片更能体现出性价比,市场最终会交出成绩单。
01 2020~2030年中国智能驾驶市场趋势分析
当前,智能驾驶/自动驾驶 NHTSA(美国国家交通安全管理局)和SAE(美国机动车工程师学会)的分类为:
L0~L2++:智能驾驶/辅助驾驶L3~L5:自动驾驶2020年~2030年,中国市场智能和自动驾驶成本概况如图所示:

图片来源:Stratedy Analytica 英飞凌
从上图可以看出L2级别的智能驾驶成本在160美金,2020年中国市场约为600万辆,到2030年,L4/L5自动驾驶的成本在970美金,中国市场约为400万辆。同时可以看到激光雷达是在L3级以上自动驾驶车型上逐步成为标配。2025年L3级自动驾驶车智能驾驶配置在630美金,价格区间合理。2025年L2+级智能驾驶和L3级自动驾驶的配置差价缩小到100美金以内。用户在100美金差价的选择中,如果法律放开,选择L3自动驾驶的人更多。
根据当前智驾发展来看,至2025年前,中国市场还是以L2~L2+级的智能驾驶为主,法律法规和成本是限制车厂往L3级以上自动驾驶发展的重要因素。2025年,各大车厂开始L3级自动驾驶发力,2023年和2024年是方案商集中展示L3级自动驾驶的时机。
激光雷达是L3级的门槛,至于是否要上激光雷达尚存争议,但目前大部分OEM都已预留了激光雷达。当前阶段,融合方案已成主流,舱驾融合或驾舱融合方案逐步量产,但最终的中央计算平台还需时日。
预计2025年后L3级以上自动驾驶方案开始落地,中央计算平台也将开始纷纷落地。2030年L4/L5自动驾驶逐步成为主流,汽车行业将进入新里程碑,全自动驾驶车。
02 中国智能驾驶 技术发展趋势
当前,智能驾驶/自动驾驶等级(SAE J3016)分为L0~L5,此划分更适合中国国情,L0~L5规定了驾驶员和车辆的职责划分,如下图所示:
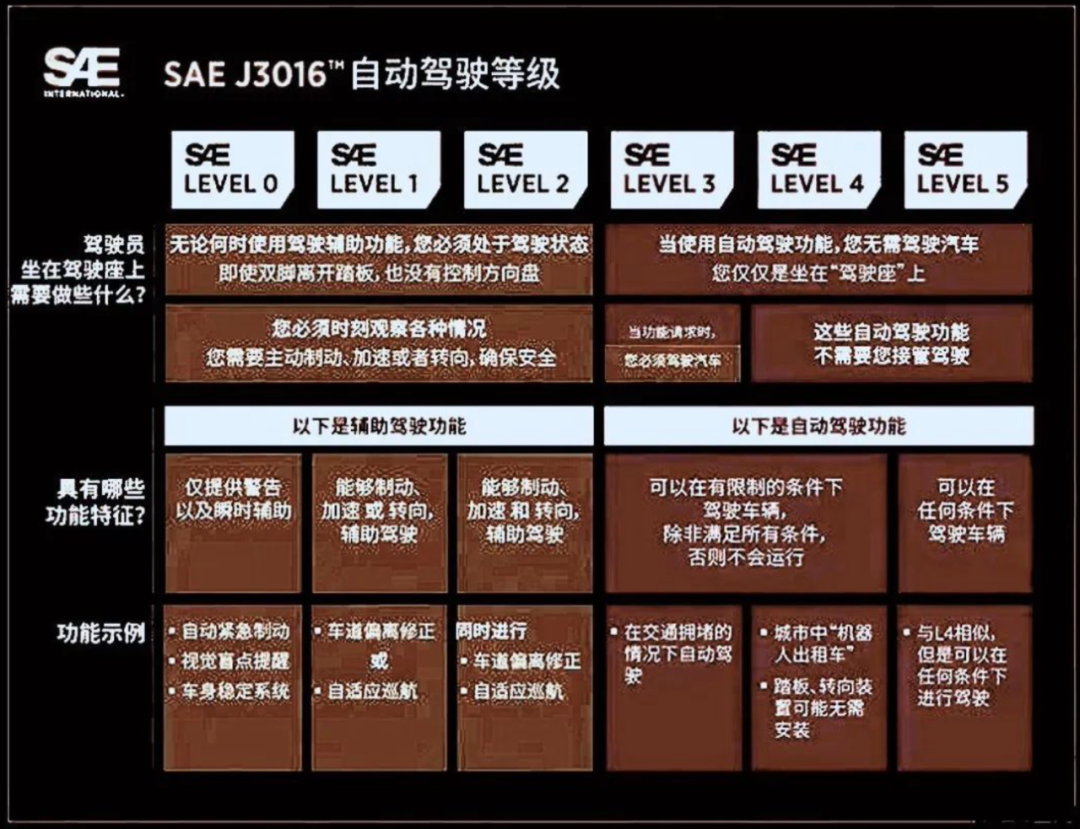
· L0~L2++智能驾驶,还是以LDW/FAW等场景应用
· L3~L5自动驾驶,开始允许驾驶脱离方向盘,其法律还等完善
中国的道路非常复杂,短期内法律放开的概率很低,目前大部分OEM还是高速高架等特定场景智能驾驶为主,短期同时也看到新势力如小鹏等也开始城市道路的智能驾驶,由于中国车厂的内卷,各大车厂的技术实力差距会越来越小。
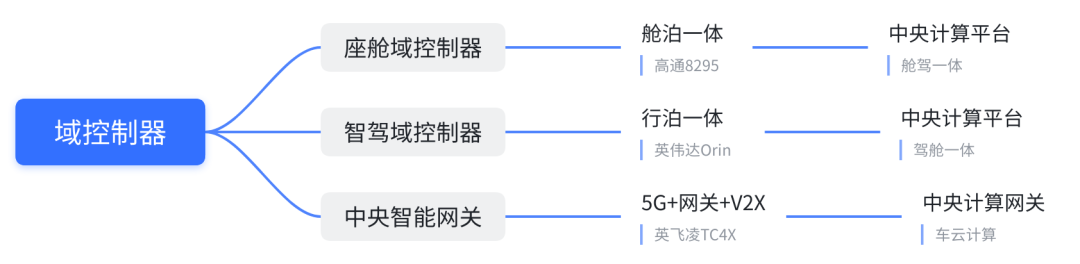
整车电子架构的变化域控制器 >融合方案 >中央计算平台(博世汽车EE架构)
谈及E/E架构的演变,绕不开特斯拉。2012年的Model S已出现功能域划分的概念,到2017年,特斯拉又在Model 3上进一步尝试了中央计算+区域控制器框架,出现中央计算雏形。
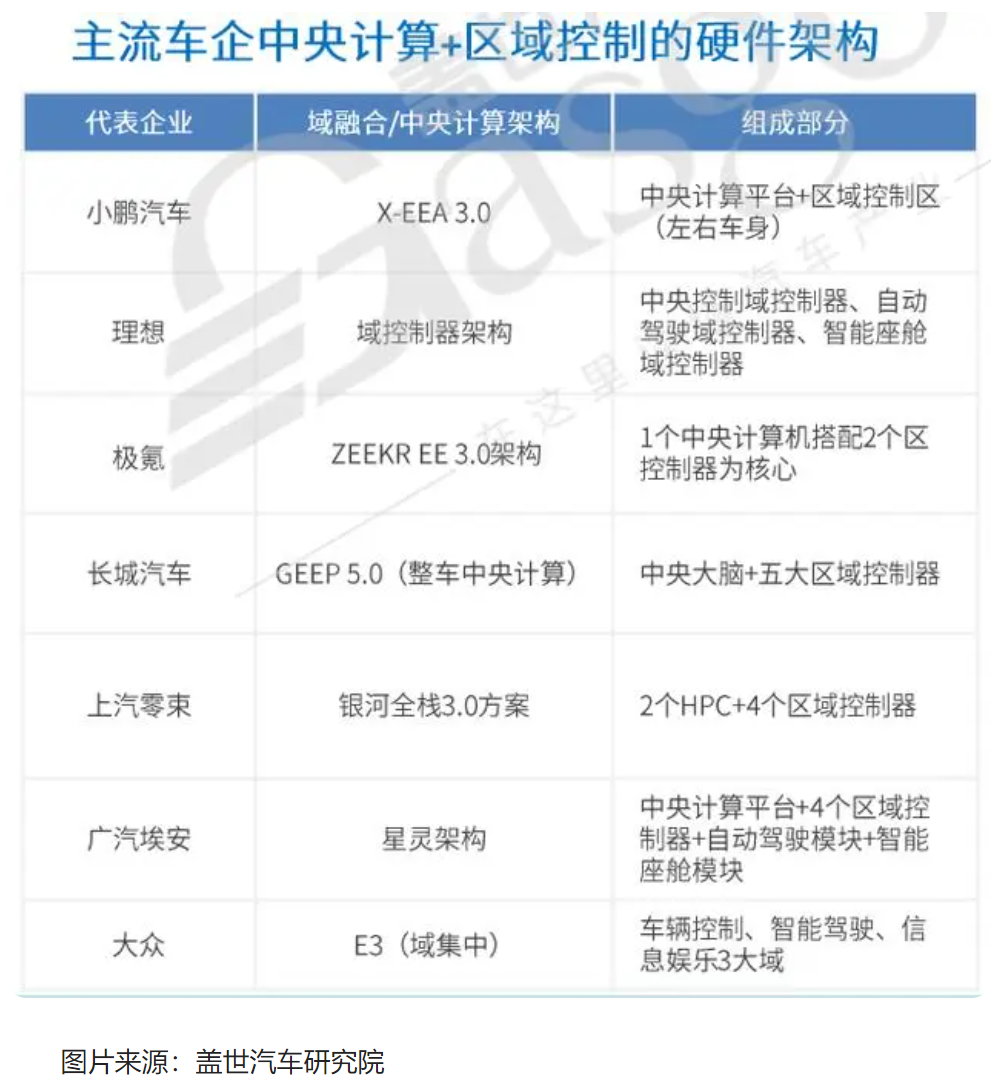
以上汽零束银河全栈3.0架构为例,其由2个HPC高性能计算单元和4个区域控制器构成。两个HPC作为整车的计算中心,用于实现智能座舱、智能驾驶以及智能驾驶冗余备份等功能,4个区域控制器用于实现各自不同区域的相关功能。
广汽埃安的星灵架构则是由3个核心计算单元和4个区域控制器构成,并采用了高速车载以太网为主干,结合5G通信技术,形成车内外高速互联的架构。其中,3个核心计算单元包括中央运算单元、自动驾驶控制单元、信息娱乐控制单元。此案例中,其中央运算单元搭载NXP S32G399网关计算芯片,座舱域控制可搭载高通8155或8295芯片,智驾域控制模块则搭载华为昇腾610高性能芯片。
此外,还有东风岚图ESSA架构、长城汽车(601633)- GEEP4.0架构、小鹏X-EEA3.0等,各家的架构设计并不一致,名称也各不相同,但总体趋势还是朝着中央计算+区域控制架构前进。
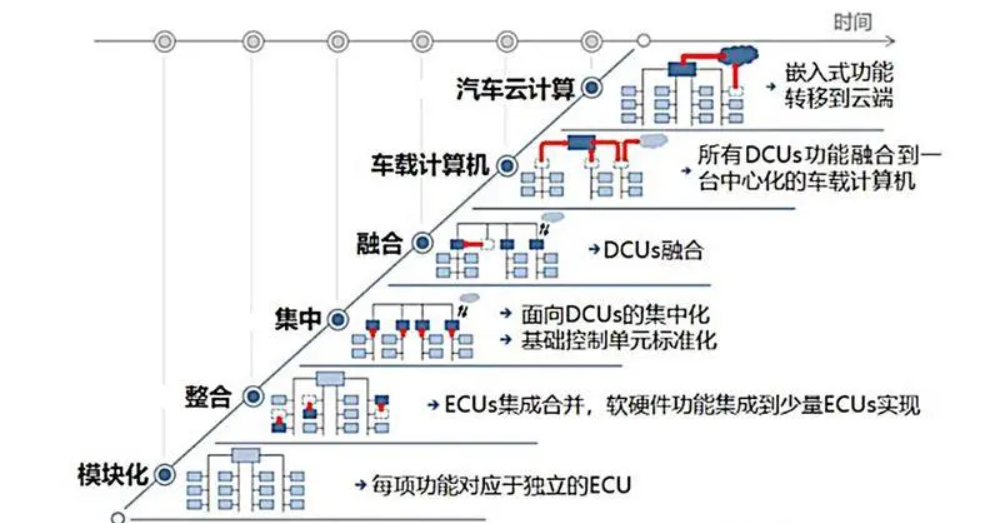
图片来源:博世 Bosch
关于中央计算平台,预计未来智能驾驶/自动驾驶融合智能座舱的概率高,因为智能驾驶的安全要求高,往下融合安全等级要较低。当前中国国内自主平台已经开始自研中央计算平台,主流方案为中央计算平台(Center Computer/HPC)+区域控制器。
03中国智能驾驶主流芯片及方案

智能驾驶到底为用户解决了什么问题?说到底就是部分场景到全场景最终实现无人驾驶的目的。通过工作条件是偶尔使用还是全时使用,以及人机共驾和无人驾驶等场景来解决:能耗问题,效率问题,舒适问题,安全问题。
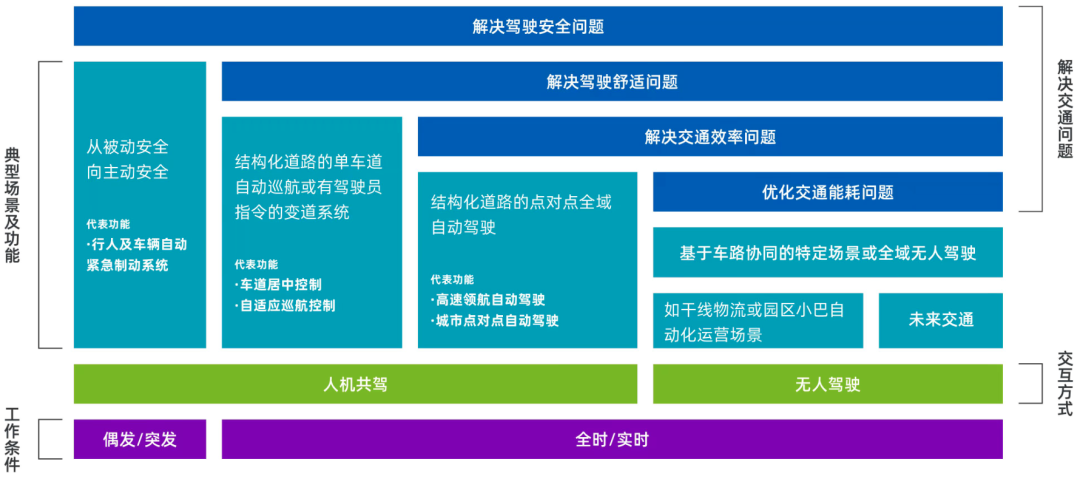
所有智能驾驶/自动驾驶的实现都包含四个过程:感知 > 融合 > 决策 > 控制;下面让我们看看主流玩家的方案分析。
1英特尔方案 Mobileye EyeQ5 -- 24TOPS/EyeQ6H --34TOPS
EyeQ5是一款7纳米芯片,具备多线程8核CPU,外加创新一代18核Mobileye视觉处理器。EyeQ5由台积电负责生产,10纳米节点或以下FinFET技术设计帮助它大大降低了能耗,并且大幅提升性能。
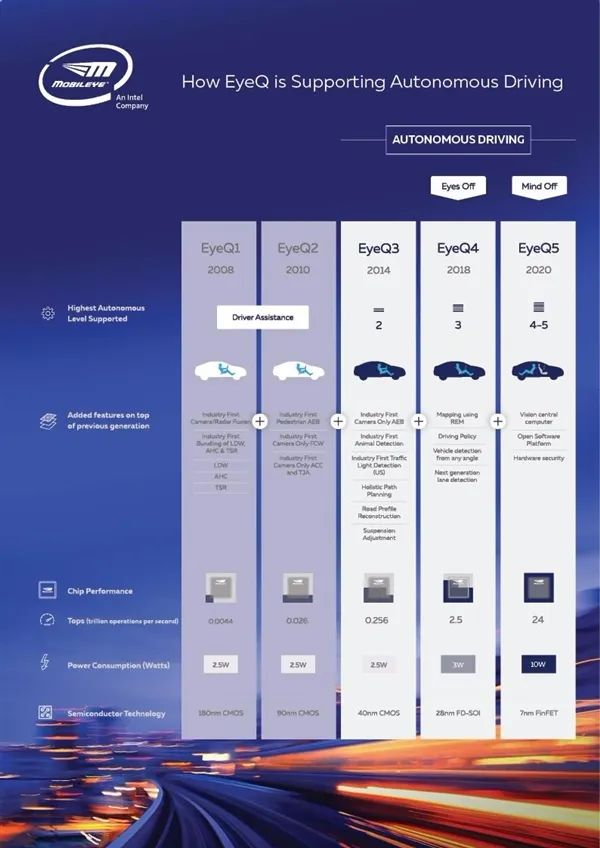
图片来源:Mobileye
EyeQ6和Ultra都是属于最新一代的芯片,尤其是Ultra芯片算例能达到176TOPS(L4自动驾驶准备)。
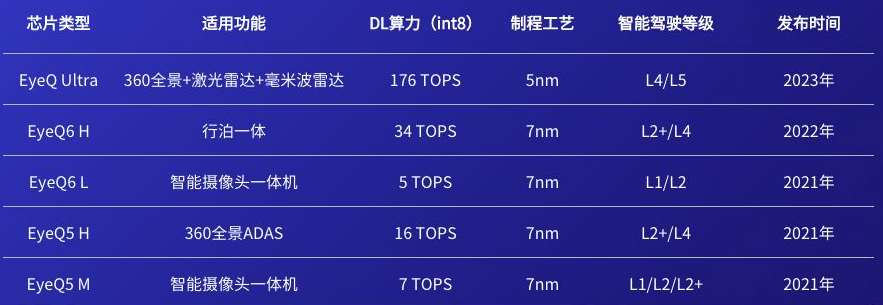
图片来源:Mobileye
Mobileye的EyeQ6分Light版本和High版本以及Ultra三个版本:
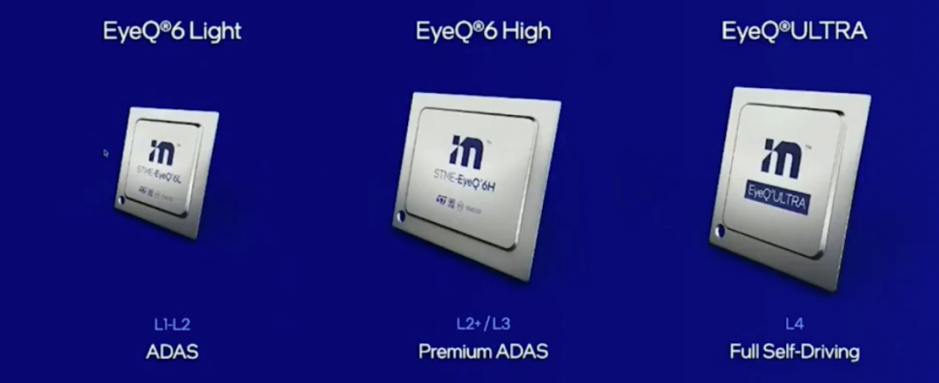
图片来源:Mobileye
日前,极氪汽车已宣布在2024年上半年在某款车上量产 Mobileye EyeQ5 High,但目前EyeQ6还没有量产车型信息。
2英伟达方案Drive AGX平台/Orin芯片和Thor芯片
图片来源:NVIDIA
NVIDIA DRIVE Orin™ SoC(系统级芯片)可提供每秒 254 TOPS(万亿次运算),是智能车辆的中央计算机。它是理想的解决方案,为智能驾驶/自动驾驶功能、置信视图、数字集群以及 AI 驾驶舱提供动力支持。借助可扩展的 DRIVE Orin 产品系列,开发者只需在整个车队中构建、扩展和利用一次开发投资,便可从 L2+ 级系统一路升级至 L5 级全自动驾驶汽车系统。
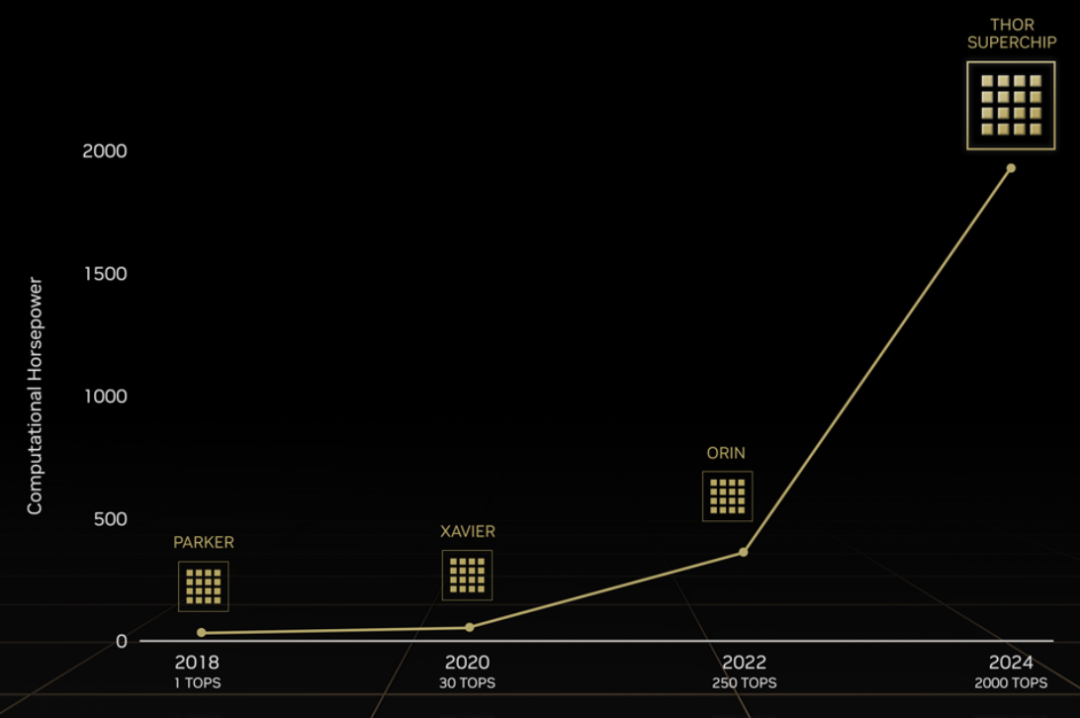
1 NVIDIA DRIVE Orin™ SoC(系统级芯片)可提供每秒 254 TOPS(万亿次运算)

2 借助DRIVE Thor,汽车制造商可以在单个系统级芯片上高效整合数字仪表盘、信息娱乐、泊车、辅助驾驶等多种功能,从而极大地提高开发效率和软件更新迭代的速度。2000 TOPS 和 2000 TFLOPS 全部用于自动驾驶工作流。
NVIDIA DRIVE Thor 是新一代集中式车载计算平台,可在单个安全、可靠的系统上运行高级驾驶员辅助应用和车载信息娱乐应用。DRIVE Thor 超级芯片借助新的 CPU 和 GPU 突破,可提供出色的 2000 万亿次浮点运算性能,同时降低总体系统成本,计划于 2025 年开始量产。
DRIVE Thor 能够被配置为多种模式,可以将其 2000 TOPS 和 2000 TFLOPS 全部用于自动驾驶工作流,也可以进行拆分,将其配置为一部分用于驾驶舱 AI 和信息娱乐功能,一部分用于辅助驾驶。
3地平线方案Journey征程平台/J5 -- 128TOPS 2023 SOP
地平线芯片目前是国产智能驾驶方案的龙头,目前理想汽车已在L7/L8/L9中配车型上使用了该芯片。

图片来源:CSDN@KilnHuang
J5芯片内留有丰富的接口可调用:
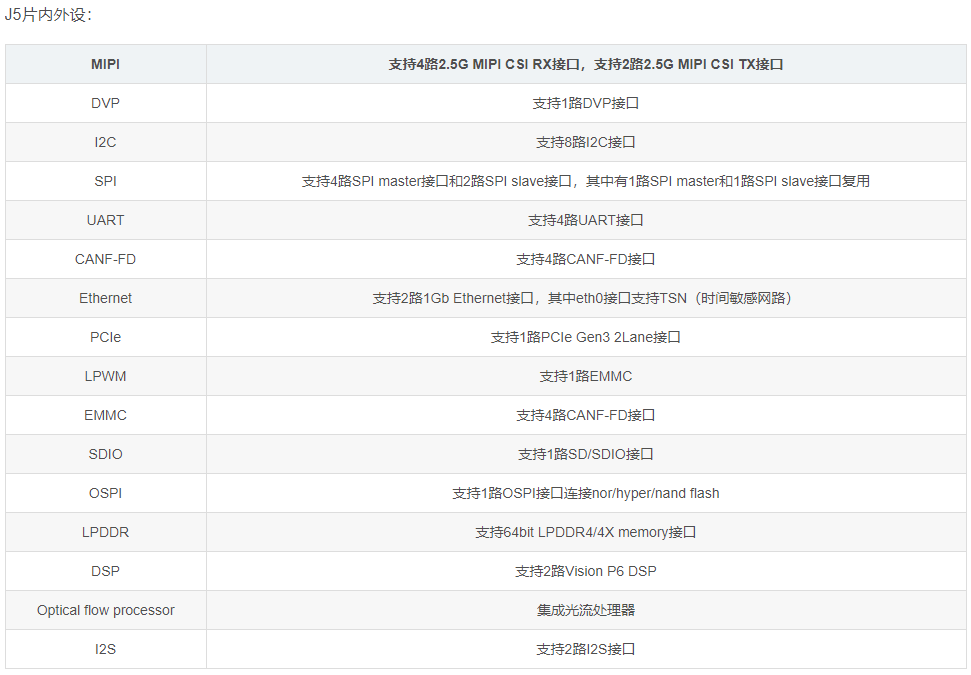
J5开发板照片:

图片来源:地平线开发者社区
4高通方案Snapdragon Ride平台/Ride Flex SoC:
SA8650 GEN2 for ADAS L2++ 2024 SOP
SA8775 GEN3 for center computer 2024 Q4 SOP
Snapdragon Ride平台基于一系列不同的骁龙汽车SoC和加速器建立,其采用了可扩展且模块化的高性能异构多核CPU、业界领先的GPU,以及高能效的AI引擎与计算机视觉引擎。基于不同的SoC和加速器的组合,Snapdragon Ride平台能够根据自动驾驶的每个细分市场的需求进行匹配,根据不同等级的自动驾驶系统提供相应的算力支持。

Snapdragon Ride采用了基于5nm制程工艺的高度可定制化SoC平台,具备灵活的可扩展性,不仅能帮助汽车制造商和一级供应商开发更高能效且具备高散热表现的产品,还为打造定制化解决方案提供更多选择,为下一代汽车架构的演进指明了方向。

Snapdragon Ride还拥有丰富的软件生态,通过面向复杂用例而优化的软件和应用,助力汽车制造商为日常驾驶带来更高的安全性和舒适性。例如自动导航的类人高速公路驾驶,以及提供感知、定位、传感器融合和行为规划等模块化选项。这些自动驾驶软件栈将帮助汽车制造商和一级供应商加速开发和创新,从安全、车联网等多个层面强化自动驾驶体验。

Snapdragon Ride平台通过高性能、低功耗计算,为丰富层级和品类的车型带来开放、可定制的完整先进驾驶辅助系统和自动驾驶解决方案,将推动自动驾驶未来的到来。
5华为方案MDC平台/昇腾910 -- 320TOPS
昇腾910是一款具有超高算力的AI处理器,其最大功耗为310W,作为一款高集成度的片上系统(SoC),除了基于达芬奇架构的AI核外,昇腾910还集成了多个CPU、DVPP和任务调度器(TaskScheduler),因而具有自我管理能力,可以充分发挥其高算力的优势。

华为MDC智能驾驶计算平台,具备高度的开源性,不仅能够使用华为自研的鸿蒙平台,同时还能支持Adaptive AUTOSAR和ROS,并且搭配配套的工具链。
MDC智能驾驶计算平台还获得过德国莱茵颁发的ISO26262功能安全管理认证,证明了该平台的安全性。同时,MDC智能驾驶计算平台还拥有高能效、低时延等特点。
业界将L2-L5级自动驾驶进行了算力估算,其L2级需算力<10tops,L3级需算力为30-60tops,L4级需算力>100TOPS,L5级则需算力为500-1000TOPS。而搭载了华为HI自动驾驶系统的阿尔法S华为HI版车型上的芯片算力达400TOPS,远超L4级自动驾驶所需的算力。值得一提的是,按照华为原定计划将于2030年达到L5级自动驾驶水平,对此MDC智能驾驶计算平台的高阶版芯片算力最高可达800TOPS。

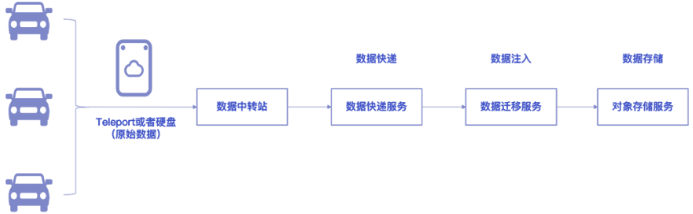
华为MDC智能驾驶首先建立了数据采集和传输以及存储的全套车云一体方案, 通过测试车队来采集海量数据。开发高级驾驶辅助系统和自动驾驶车辆需要采集、传输和存储海量数据,华为云服务提供数据快递、数据注入和数据存储要求,优化成本和效率。
数据处理、算法开发和模型训练
提供高性能的海量数据分析处理和数据预标注能力,降低用于模型训练的数据准备阶段的时间和成本,优化的机器学习和深度学习框架,训练和推理速度遥遥领先。
自动驾驶仿真测试
在仿真阶段,需要极强的GPU计算能力,在消耗大量计算资源的同时,会产生大量临时数据,对存储带宽与时延也有极高的要求,华为云提供GPU加速云服务器,允许开发者构建自身需要的仿真环境,并按需灵活使用。
自动驾驶开发平台技术架构
开发自动驾驶车辆采集、传输、存储和管理海量数据。华为云提供海量的、高度扩展能力的存储和计算能力,以及Hadoop、Spark等大数据组件和AI一站式开发平台,预集成数据预处理及半自动化标注算法,用户通过平台可高效完成自动驾驶模型按需训练和仿真测试,帮助用户降低开发环境基础设施部署复杂度和成本。
高速道路和特定场景的智能驾驶已经普及,2025年起自动驾驶即将来临,各大厂家为2025年在做技术储备,城市道路的智能驾驶是目前各大车厂最大的宣传点,怿星科技将为城市道路和2025年自动驾驶提供自己的一份力量!
*注:文中图片均来源网络,如有侵权,请联系删除。