MPU6050 加速度计和陀螺仪传感器与 Arduino 连接
前言
MPU6050是一款非常流行的加速度计陀螺仪芯片,具有六轴感应和 16 位测量分辨率。这种意义上的高精度和低廉的成本使其在 DIY 社区中非常受欢迎。甚至许多商业产品都配备了 MPU6050。陀螺仪和加速度计的组合通常被称为惯性测量单元或 IMU。
IMU 传感器用于各种应用,例如手机、平板电脑、卫星、航天器、无人机、无人机、机器人等。它们用于运动跟踪、方向和位置检测、飞行控制等。
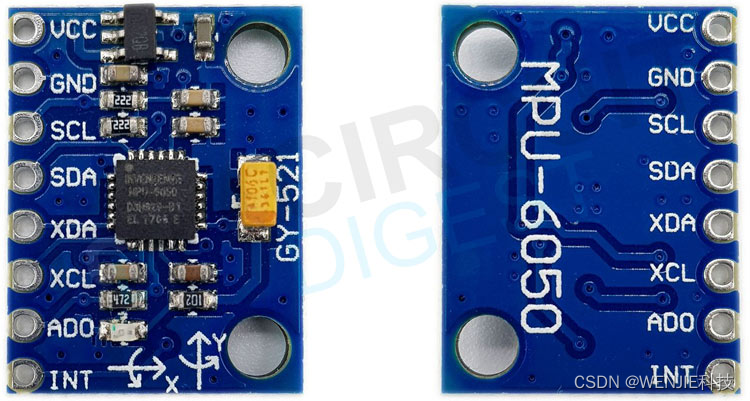
MPU6050 模块引脚
MPU6050 模块共有 8 个引脚。其中至少需要 4 个引脚用于连接。MPU6050模块的管脚如下:
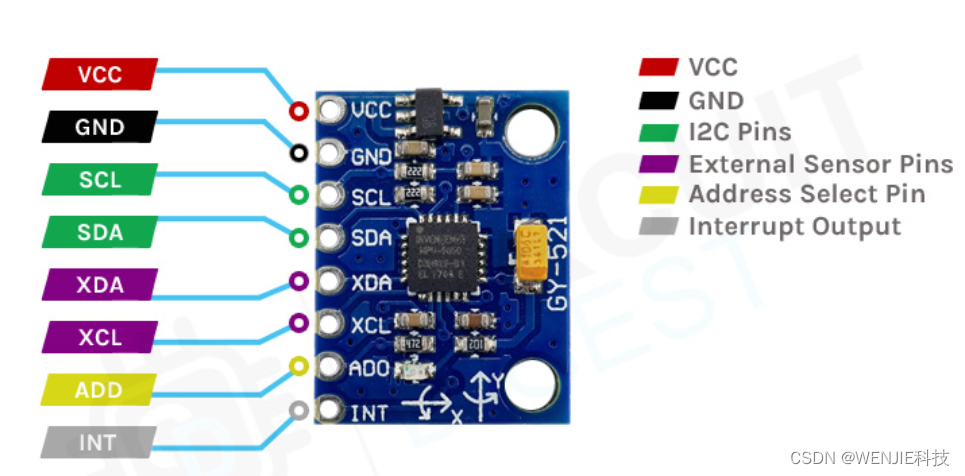 VCC==》为模块提供电源,连接到Arduino的5V引脚。
VCC==》为模块提供电源,连接到Arduino的5V引脚。
GND==》连接到 Arduino 的接地引脚。
SCL==》串行时钟 用于为 I2C 通信提供时钟脉冲。
SDA==》串行数据 用于通过 I2C 通信传输数据。
XDA==》辅助串行数据 - 可用于将其他 I2C 模块与 MPU6050 连接。
XCL==》辅助串行时钟 - 可用于将其他 I2C 模块与 MPU6050 连接。
ADD==》如果使用多个 MPU6050 模块,地址选择引脚。
INT==》中断引脚指示数据可供 MCU 读取。
MPU6050 模块组成
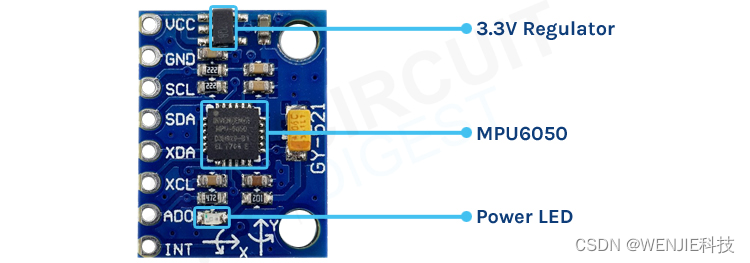 MPU6050 模块由 TDK InvenSense 的 MPU6050 IMU 芯片组成。它采用 24 引脚 QFN 封装,尺寸为 4mm x 4mm x 0.9mm。该模块的组件数量非常少,包括一个 AP2112K 3.3V 稳压器、I2C 上拉电阻和旁路电容。还有一个电源指示灯,指示模块的电源状态。
MPU6050 模块由 TDK InvenSense 的 MPU6050 IMU 芯片组成。它采用 24 引脚 QFN 封装,尺寸为 4mm x 4mm x 0.9mm。该模块的组件数量非常少,包括一个 AP2112K 3.3V 稳压器、I2C 上拉电阻和旁路电容。还有一个电源指示灯,指示模块的电源状态。
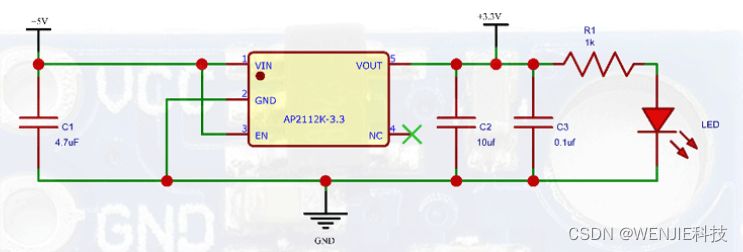
MPU6050陀螺仪传感器模块电路图
MPU6050模块原理图如下。如前所述,该板的组件数量非常少。功率部分围绕AP2112K-3.3稳压器设计。钽电容器和多层电容器提供了足够的滤波。带有限流电阻的 LED 用作电源指示灯。
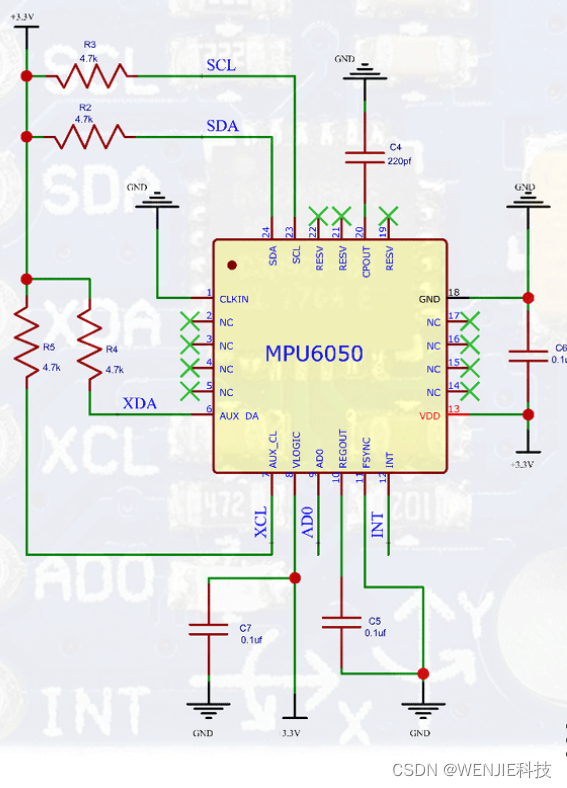 MPU6050 电路非常简单。它由 MPU6050 芯片本身以及旁路电容和上拉电阻组成。
MPU6050 电路非常简单。它由 MPU6050 芯片本身以及旁路电容和上拉电阻组成。
MPU6050模块如何工作?
MPU6050 是一种微机电系统 (MEMS),内部包含一个 3 轴加速度计和 3 轴陀螺仪。这有助于我们测量系统或物体的加速度、速度、方向、位移和许多其他与运动相关的参数。该模块内部还有一个 (DMP) 数字运动处理器,该处理器功能强大,可以执行复杂的计算,从而腾出微控制器的工作量。
 该模块还有两个辅助引脚,可用于连接外部 IIC 模块,如磁力计,但它是可选的。由于模块的 IIC 地址是可配置的,因此可以使用 AD0 引脚将多个 MPU6050 传感器连接到微控制器。该模块还提供了有据可查和修订的库,因此它很容易与 Arduino 等著名平台一起使用。因此,如果您正在寻找一种传感器来控制您的遥控车、无人机、自平衡机器人、人形机器人、Biped 或类似设备的运动,那么该传感器可能是您的正确选择。
该模块还有两个辅助引脚,可用于连接外部 IIC 模块,如磁力计,但它是可选的。由于模块的 IIC 地址是可配置的,因此可以使用 AD0 引脚将多个 MPU6050 传感器连接到微控制器。该模块还提供了有据可查和修订的库,因此它很容易与 Arduino 等著名平台一起使用。因此,如果您正在寻找一种传感器来控制您的遥控车、无人机、自平衡机器人、人形机器人、Biped 或类似设备的运动,那么该传感器可能是您的正确选择。
MEMS加速度计如何工作?
MEMS 加速度计用于需要测量线性运动(运动、冲击或振动)但没有固定基准的地方。它们测量它们所附着的任何物体的线性加速度。所有加速度计的工作原理都是弹簧上的质量,当它们附着的物体加速时,质量由于其惯性而想要保持静止,因此弹簧被拉伸或压缩,产生一个被检测到并对应的力施加的加速度。

在 MEMS 加速度计中,两个正交轴上的精确线性加速度检测是通过一对由弹簧“防护”质量形成的硅 MEMS 检测器实现的。每个质量块提供由交错的指状结构阵列形成的可变电容的移动板。当传感器沿其敏感轴受到线性加速度时,检测质量由于其惯性而趋于抵抗运动,因此质量及其指相对于固定电极指发生位移。手指之间的气体提供阻尼效果。这种位移会在移动和固定硅指之间产生一个差分电容,该电容与施加的加速度成正比。使用高分辨率 ADC 测量电容变化,然后根据电容变化率计算加速度。然后在 MPU6050 中将其转换为可读值,然后传输到 I2C 主设备。
MEMS陀螺仪如何工作?
MEMS 陀螺仪的工作基于科里奥利效应。科里奥利效应指出,当质量块以一定速度沿特定方向移动并对其施加外部角运动时,会产生力并导致质量块发生垂直位移。产生的力称为科里奥利力,这种现象称为科里奥利效应。位移速率将与所施加的角运动直接相关。
MEMS 陀螺仪包含一组四个质量块,并保持连续振荡运动。当施加角运动时,科里奥利效应会导致质量之间的电容发生变化,具体取决于角运动的轴。感测电容的这种变化,然后将其转换为读数。这是一个小动画,显示了这些质量块在应用不同轴的角运动时的运动。

常见问题
问:什么是 MPU6050?
MPU6050 是一个惯性测量单元或 IMU,具有三轴加速度计、三轴陀螺仪、数字运动处理器 (DMP) 和 16 位 ARC。
Q. MPU6050 采用什么技术?
MPU6050 是围绕微机电技术构建的,也称为 MEM。
Q. MPU6050可以倾斜测量角度吗?
是的,我们可以用 MPU6050 测量倾斜角度。
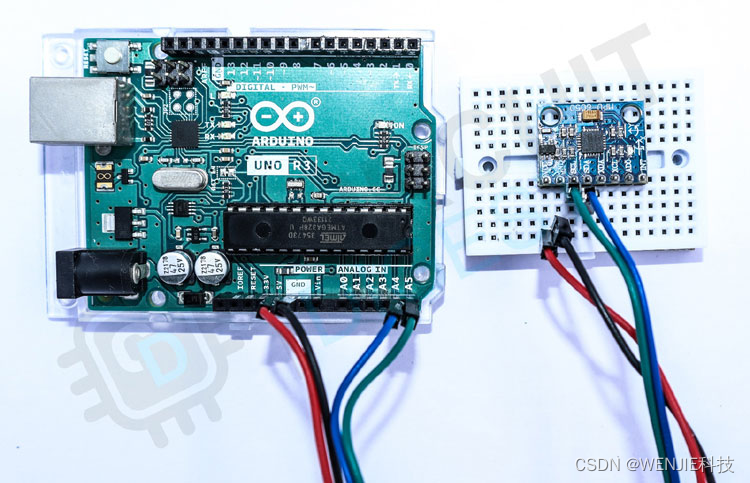
Arduino MPU6050 加速度计和陀螺仪传感器模块接口电路图
下图显示了 MPU6050 与 Arduino 接口的电路图。MPU6050 使用 I2C 模块进行通信。由于 I2C 引脚可承受 5V 电压,因此我们可以将它们与 Arduino 一起使用,而无需任何电平转换器。SCL 引脚连接到 Arduino 的 SCL 引脚 (A5)。同样,SDA 引脚连接到 Arduino 的 SDA 引脚(A4)。
Arduino MPU6050 模块代码
在本例中,我们将从 MPU6050 模块读取加速度计、陀螺仪和温度数据,并将其打印到串行监视器上。首先,我们需要安装必要的库。要安装库,请在 Arduino IDE 中打开库管理器。然后搜索并安装以下库:Adafruit MPU6050 库、Adafruit Unified Sensor Library和Adafruit Bus IO Library。完成后,创建一个新草图并将代码粘贴到其中。然后编译并上传到Arduino。上传后,打开串行监视器,读数将显示在那里。
在开始时,我们已经包含了 Adafruit MPU6050 库、Adafruit Sensor 库和 wire 库,它们是与 MPU6050 通信和获取读数所必需的。然后我们创建了一个名为 mpu 的新实例,它将用于从 MPU6050 IMU 获取读数。
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <Wire.h>
Adafruit_MPU6050 mpu;
在setup函数中,我们已经初始化了串口通信和 MPU6050 IMU。然后设置加速度计范围、陀螺仪范围和滤波器带宽参数。量程参数会影响读数的准确性。因此,如果需要,可以根据库值更改这些值。setFilterBandwidth 参数将改变低通滤波器的带宽。
void setup(void) {
Serial.begin(115200);
// Initializethe MPU6050 IMU
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
// set accelerometer range to +-8G
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
// set gyro range to +- 500 deg/s
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
// set filter bandwidth to 21 Hz
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
delay(100);
}
在循环函数中,在 Adafruit 库的帮助下从 MPU6050 读取值,然后打印到串行监视器。这将每秒重复一次。
void loop() {
/* Get new sensor events with the readings */
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
/* Print out the readings */
Serial.print("Acceleration X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Serial.print("Rotation X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
Serial.print("Temperature: ");
Serial.print(temp.temperature);
Serial.println(" degC");
Serial.println("");
delay(1000);
}
MPU6050 连接Arduino 测试
下面的 GIF 显示了我们如何将 MPU6050 与 Arduino 连接。您可以看到,当模块旋转时,值的变化取决于旋转轴。

Arduino代码
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <Wire.h>
Adafruit_MPU6050 mpu;
void setup(void) {
Serial.begin(115200);
// Try to initialize!
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
// set accelerometer range to +-8G
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
// set gyro range to +- 500 deg/s
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
// set filter bandwidth to 21 Hz
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
delay(100);
}
void loop() {
/* Get new sensor events with the readings */
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
/* Print out the readings */
Serial.print("Acceleration X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Serial.print("Rotation X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
Serial.print("Temperature: ");
Serial.print(temp.temperature);
Serial.println(" degC");
Serial.println("");
delay(1000);
}