六步换向两两导通和三三导通的区别2
一、三三导通的不常用
之前检索六步换向的方式都为无刷电机如何换向,也未有文献提到三三导通方式。上午检索三三导通方式,文献也极少,其应用多为BLDCM高频链驱动器。
查看原因:
- 三三导通可以提高绕组利用率,但容易导致同一相上下臂同时导通(pwm-on等)。换向信号的霍尔位置信号条边沿不重合,现在的霍尔信号仅仅针对二二导通,无法提供三三导通的换向逻辑信号。
- BLDCM高频链矩阵式逆变器,由于中间高频隔离变压器的作用,上下桥臂在短时间直通也不会损坏开关管。
二、两两导通与三三导通
为了更深刻的理解两两导通和三三导通的,换向区别和电机本身,做了其区别和总结。
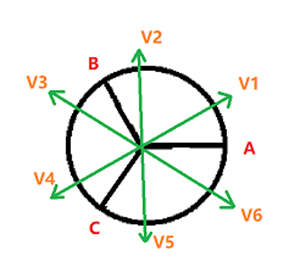
1、两两导通的工作原理:
无刷电机一般采用这种方式,理想情况下,每一时刻有两个功率管导通,两相绕组存在电流,第三相悬空失电。每一时刻上桥臂和下桥臂分别仅有一只功率器件导通。

根据两两导通方式非零电压矢量值,得到两两导通的电压矢量图:
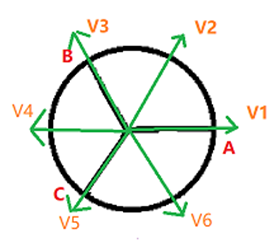
2、三三导通的工作原理:
相对于两两导通,无刷电机的三三导通指,开关管在运行周期内导通180度电角度,每60度换相一次,三相绕组同时有电流,没有悬空相。增大了绕组的利用率,减小了转矩脉动,提高了电机输出功率。

三三导通的电压矢量图:
3、两两导通和三三导通的区别:
查阅三三和两两导通方式的区别主要讨论为换相时的转矩脉动。并且还有一种二三导通的控制方式。
基于180_导通模式的无刷直流电动机控制系统研究_周衍:
在对无刷直流电动机120度和180度导通模式的电流换向过程进行了分析基础上,指出:
- 在低速运行时,无刷直流电动机180度导通模式下不利于缩短电流换向时间,对转矩脉动的抑制效果不如120度导通模式;
- 在高速情况下,相对于120度导通模式能有效地缩短时间,从而有利于减小转矩脉动。
120度导通模式的换向期间产生转矩脉动的主要原因:
关断相和开通相的电流变化率不相同,导致母线电流脉动。使换向期间转矩不平稳,换向过程中的电流Ia先降为0还是Ib先到达稳态电流。


经过公式推导后可以得到

在不同电压(转速下)的换向时间,可以看到低速状态下,两两导通要比三三导通换相时间短,保证电机的平稳。在高速状态下,三三导通换相时间短,保证电机的平稳。
(换向时间大幅度的增长,电机会出现较大的转矩脉动)。


无刷直流电机的高频链驱动器研究_王亚林:

右图放大波形图的对比可以得到:
- 三三导通方式较两两导通方式电磁转矩脉动小一点,且转矩变化率更平滑。
- 三三导通角速度大于两两导通角速度,那么,在同一点击相同转速下,三三导通的转矩脉动会更小。
即是在低速下,两两导通的转矩脉动比三三导通的要小。
在高速下,三三导通的要比两两导通的转矩脉动小。
一文献指出为什么三三导通不常用:
-
为了获得较大的启动转矩,无刷直流电机常采用二二导通的驱动方式,但是这种驱动方式因为电流换相时会引起非换相相电流的畸变,导致转矩脉动幅值增大,且该导通方式满足不了高性能高精度的要求。
-
三三导通的驱动方式,虽然没有非换相相电流畸变引起的转矩脉动幅值增大的问题,但是在该驱动方式下,电机导通角增大很多,电机理想空载的平均电流也不断增加,且增加的倍数远大于电机阻尼系数的增加量,从而使电机的效率下降,电机的扭力降低,所以该方法并不常用。
并提出了二三导通法简单的直接力矩控制电机的方法
原理是将两两导通法和三三导通法结合起来,两两导通和三三导通的换相相差30度,组合后即变成了12步换向,形成十二个扇区,其导通角度为150度。
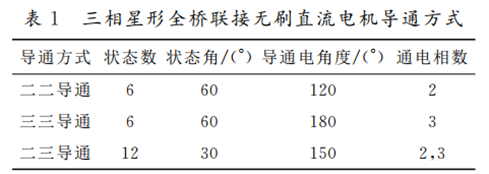
扇区划分:

其方式为30度三三导通,30度两两导通。增加换向扇区,转矩响应迅速,也有效的抑制转矩波动。
1. 导通区间长度
2. 换相的电流
- 两两导通的电流存在持续的断续状态。
- 三三导通不存在断续状态,而是三相绕组电流方向的改变
3. 优缺点
- 两两导通优点出力大,缺点转矩脉动大。
- 三三导通的优点绕组利用率高,转矩脉动小,转矩变化率平滑。
- 同电源,转速高。缺点为霍尔不能对应,(易上下导通)。
4. 霍尔位置信号
- 三三导通比两两导通提前了30电角度。无法与霍尔信号相对应。

参考文献:
[1] 高频链逆变器驱动无刷直流电机运行研究_李昕[D]
[2] 高频链驱动的无刷直流电机驱动研究_张广[D]
[3] 基于180_导通模式的无刷直流电动机控制系统研究_周衍[J]
[4] 无刷直流电机的高频链驱动器研究_王亚林[D]
[5] BLDCM高频链驱动器的三三换相信号构造及运行_闫朝阳[J]
[6] 基于PIC16F877A的永磁无刷直流电机的控制器设计_王宇鹍
[7] 无刷直流电机转矩脉动抑制措施研究_张勇[J]
被抛弃的写随笔公众号改写技术文章了,感兴趣的可以关注公众号:王崇卫
